一种作动器控制计算机的数据交叉传输系统
文献发布时间:2023-06-19 10:36:57
技术领域
本申请涉及机载计算机设计领域,具体涉及一种作动器控制计算机的数据交叉传输系统。
背景技术
作动器控制计算机一般采用冗余设计的方法获取更高的可靠性,以使计算机满足故障安全(FS)或故障工作(FO)的系统要求。在多余度(通道)控制计算机中设计了多个通道,通道之间互为备份。控制计算机工作时,每周期需要进行数据比较、监控,以及时发现计算机的通道故障,并进行系统规定的故障处理及上报。因此通道间需要进行同步及数据交互工作。
一般在系统设计时,计算机的余度配置与输入、输出数据的余度配置是一致的。在输入、输出数据的余度小于计算机的余度时,一般通过信号拆分的形式实现余度匹配;在输入、输出数据的余度高于计算机的余度配置时,通过设计高于计算机余度的交叉传输实现输入、输出数据的余度匹配。然而,现有的作动器控制计算机的数据交叉传输系统的计算机通道间同步及数据交叉传输的复杂度高,通道间数据交叉传输的效率低。
发明内容
为了解决上述技术问题,本申请提供了一种作动器控制计算机的数据交叉传输系统,能够简化了计算机通道间同步及数据交叉传输的复杂度,提高了通道间数据交叉传输的效率
本申请提供一种作动器控制计算机的数据交叉传输系统,数据交叉传输系统包括两个通道,每个通道包括至少两块伺服控制单元,其中:
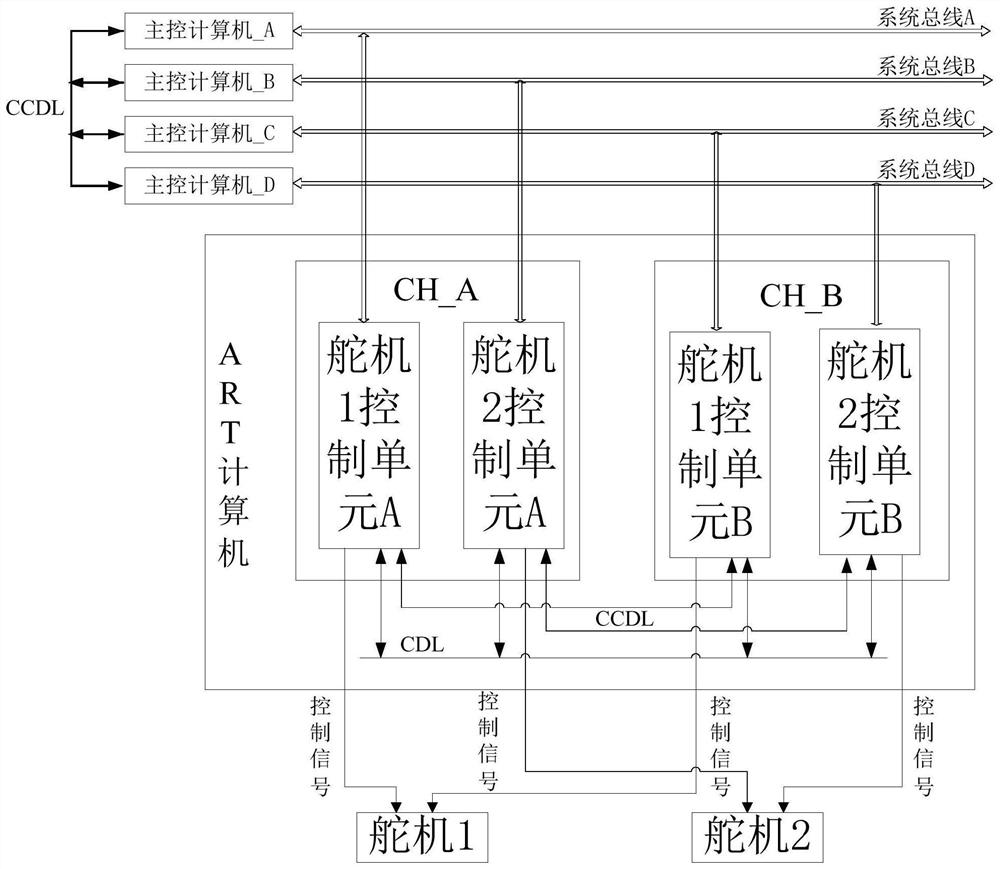
N个主控计算机分别与对应的每个通道的每个伺服控制单元连接;N个主控计算机分别与对应的N个系统总线连接;N个系统总线分别与对应的伺服控制单元连接;通道内的每个伺服控制单元分别与不同的控制对象连接;通道内的每个伺服控制单元通过通道间数据交叉传输CCDL连接,用于交叉传输数据;所有的伺服控制单元通过CDL互联。
具体的,主控计算机_A、主控计算机_B、主控计算机_C和主控计算机_D 之间相互连接,其中:
主控计算机_A通过系统总线A与通道CH_A的舵机1控制单元A连接;
主控计算机_B通过系统总线B与通道CH_A的舵机2控制单元A连接;
主控计算机_C通过系统总线C与通道CH_B的舵机1控制单元B连接;
主控计算机_D通过系统总线D与通道CH_B的舵机2控制单元B连接。
具体的,舵机1控制单元A和舵机1控制单元B连接均与舵机1连接;
舵机2控制单元A和舵机2控制单元B连接均与舵机2连接。
具体的,舵机1控制单元A、舵机1控制单元B、舵机2控制单元A和舵机 2控制单元B通过CDL互联。
具体的,舵机1控制单元A和舵机1控制单元B通过通道间数据交叉传输 CCDL连接,用于交叉传输数据;
舵机2控制单元A和舵机2控制单元B通过通道间数据交叉传输CCDL连接,用于交叉传输数据。
具体的,舵机1控制单元A和舵机1控制单元B通过SYNC连接,用于同步;
舵机2控制单元A和舵机2控制单元B通过SYNC连接,用于同步。
具体的,主控计算机_A、主控计算机_B、主控计算机_C和主控计算机_D 通过通道间数据交叉传输CCDL连接。
具体的,通道内的每个伺服控制单元分别与襟翼、副翼、平尾、垂尾、方向舵和前轮转弯连接。
本发明的优点是:对计算机输入、输出总线数据采用高余度的交叉传输,使每个伺服控制单元拿到全部余度的总线数据,提高了输入、输出总线数据的可用性(不因某条总线故障,导致连接该条总线的伺服控制单元无法获取总线数据而故障,并导致系统降级)。为每个通道相同控制对象(同一个舵机的不同余度)的伺服控制单元间设计专用数据交叉传输链路,该设计简化了计算机通道间同步及数据交叉传输的复杂度,提高了通道间数据交叉传输的效率。
附图说明
图1是本发明系统结构框图。
图2是数据交叉传输(CDL)链路图。
图3是通道间数据交叉传输(CCDL)链路图。
具体实施方式
一种作动器控制计算机的数据交叉传输策略,其特征在于:该策略是基于作动器控制计算机冗余设计的特点,该特点主要包括:输入、输出数据余度配置及计算机的余度配置不同的特点、计算机通道内伺服模块相互独立的特点、计算机内数据交叉传输的特点。
输入、输出数据余度配置及计算机的余度配置不同的特点是指计算机的输入数据中,有部分数据的余度配置高于计算机的余度配置(如接收的总线数据为四余度,计算机为两余度);计算机的输出数据中,有部分数据的余度配置高于计算机的余度配置(如发送的总线数据为四余度,计算机为两余度)。
计算机每个通道内伺服模块的特点,是指计算机内部各通道至少包含两块伺服控制单元,通道内各个伺服控制单元功能独立,通道内各个伺服控制单元控制对象不同,且每个伺服控制单元都与外部一条独立总线连接。
计算机内数据交叉传输的特点,是指计算机输入输出的数据在通道间及通道内进行交叉传输,基于权利要求2和权利要求3,根据交叉传输要求,将数据分为两类,一类为进行全部伺服控制单元间的交叉传输,如每个伺服控制单元收发的总线数据需要全部伺服控制单元进行交叉传输,称之为数据交叉传输 (CDL);一类为计算机通道间的交叉传输,通道间相同控制对象的伺服控制单元间数据交叉传输(如舵机A控制单元A与舵机A控制单元B进行双通道数据交叉传输),称之为通道间数据交叉传输(CCDL)。两部分数据采用独立的链路进行交叉传输。
下面对本发明做进一步详细说明。
一种作动器控制计算机的数据交叉传输策略,是针对某型复杂架构的伺服控制系统伺服控制计算机提出的数据交叉传输方法。伺服控制计算机为两余度设计,每个余度有两块伺服控制单元,每个伺服控制单元通过系统总线与主控计算机一个通道连接。伺服控制计算机通过接收四余度系统总线数据,依据传感器反馈信息,控制舵机1、舵机2,完成舵面的闭环控制。舵机1、舵机2均为两余度配置,伺服控制计算机为两余度配置。系统结构框图如图1所示。
伺服控制计算机工作原理为:接收主控计算机通过系统总线发送的指令数据,并采集相关舵面的位置反馈信息,依据这些数据信息计算出舵面控制指令并发送给控制对象(舵机),并将控制结果通过系统总线反馈给主控计算机。计算机为两余度设计,因此存在通道间同步和数据交叉传输要求,以实现数据的比较监控,计算机的故障综合等。
工作过程中需要交叉传输的数据有:各伺服控制单元从连接的系统总线收到的控制指令、各伺服控制单元需要反馈给主控计算机的控制结果、故障状态等数据,需要实现四余度的互传;各通道的同一控制对象的伺服控制单元采集的位置、状态等信息、计算的控制指令等,需要实现两余度的互传。
如图2所示,设计了专用的CDL接口,完成四个伺服控制单元的数据交叉传输,为了减小系统设计的复杂度,该传输为自主转发,即每个伺服控制单元收到新的总线数据后进行自主转发给其余3个伺服控制单元。伺服控制单元将反馈的总线数据没周期进行自主转发,每个伺服控制单元将四个伺服控制单元的反馈数据在总线周期到达后发送给主控计算机。四个伺服控制单元不进行强制同步操作。四余度系统总线数据的一致性由4余度主控计算机在发出时进行监控,每条总线数据自带有效标。四个伺服控制单元对四余度系统总线数据的选用逻辑如表1。此交叉传输方法复杂度低于四余度交叉传输,数据可用性高于两余度交叉传输。
表1数据选用逻辑
如图3所示。各通道的同一控制对象的伺服控制单元采集的位置、状态等信息、计算的控制指令等,需要实现两余度的互传。该方式为标准的两余度数据交叉传输、表决监控方式。舵机1控制单元A和舵机2控制单元B在每个控制周期中,首先进行同步,同步成功后,交叉传输状态数据和控制指令。通过比较监控,发现伺服控制单元是否故障,在发生故障时上报故障并进行故障处理,以实现控制计算机一次故障安全(FS)的设计要求。
综上所述,本方案中针对一种作动器控制计算机,其特点为:输入、输出总线为4余度配置,计算机为两余度(通道)配置,每个通道中包含两块功能独立的伺服控制单元,完成对不同舵机的控制,每个伺服控制单元通过一条独立的总线与飞管计算机连接。设计了输入、输出总线数据的四余度交叉传输链路,以使每个伺服控制单元都能拿到全部总线数据,设计了两个通道间相同控制对象的伺服控制单元间数据交叉传输链路,以实现双余度伺服控制单元的数据交叉传输,从而实现两余度的比较监控功能。达到系统要求的一次故障安全 (FS)的设计目标。
- 一种作动器控制计算机的数据交叉传输系统
- 一种隔离式作动器控制总线的数据发送方法以及一种隔离式作动器控制总线的数据接收方法