一种仿蜥蜴目动物的柔性快速抓取装置及方法
文献发布时间:2023-06-19 10:41:48
技术领域
本发明涉及仿生抓取装置技术领域,特别涉及一种仿蜥蜴目动物的柔性快速抓取装置及方法。
背景技术
在太空探测活动中,日益增长的太空垃圾对卫星、飞船等航天设备的威胁日渐严峻,现阶段缺少一种对太空垃圾进行回收的抓取装置。为解决上述问题,本发明以蜥蜴目动物快速捕食行为为基础,结合超弹性材料设计了一种柔性快速抓取装置,可快速、准确地对太空垃圾进行柔性抓取,实现对太空垃圾的回收。
发明内容
本发明的目的在于克服现有技术的不足,提供一种仿蜥蜴目动物的柔性快速抓取装置。
本发明的另一目的在于提供一种仿蜥蜴目动物的柔性快速抓取方法。
本发明的技术方案为:一种仿蜥蜴目动物的柔性快速抓取装置,包括发射装置、蓄力装置、转向装置和传感装置,所述转向装置控制发射装置和蓄力装置的方向,所述发射装置包括柔性抓手、导向板和发射导管,所述导向板设置在发射导管内,蓄力装置与柔性抓手之间连接有第一超弹性体,导向板还与第二超弹性体连接,蓄力装置对导向板施加外力,使导向板拉伸第二超弹性体蓄能。
所述发射装置还包括挡板,所述发射导管的一端为发射口,发射导管的另一端连接蓄力装置,所述柔性抓手设置在导向板朝向发射口的一侧,导向板上设有通孔,所述第一超弹性体穿过通孔,发射口处设置挡板,挡板和导向板之间连接有第二超弹性体,所述第一超弹性体和第二超弹性体均采用超弹性绳体。其中,第二超弹性体设有若干个,若干个第二超弹性体均匀布置,挡板通过螺钉与发射导管连接。
所述发射导管内设有若干导向槽,所述导向板与导向槽相配合,导向板在发射导管内轴向移动,导向板为电磁体。其中,导向槽用于限制导向板的自由度,避免导向板沿径向旋转,导向槽设有四个,四个导向槽均布在发射导管的侧壁上。
所述柔性抓手包括前端板、后端板、柔性臂、控制器和传感器,柔性臂包括相接的长臂和短臂,所述柔性臂均布在前端板的外周,柔性臂的短臂与前端板通过扭簧连接,控制器设置在前端板和后端板之间,传感器设置在前端板上,传感器与控制器电性连接。其中,传感器用于判断是否捕捉到物体,当捕捉到物体时,传感器将信息传输给控制器,控制器断电使后端板失去磁性,由于吸附作用消失和扭簧恢复力,柔性臂将快速实现反向合并捕捉物体。
所述柔性臂的内部设有磁吸性金属,柔性臂的外表面包覆有硅胶,后端板为电磁体,在柔性抓手收起状态下,柔性臂的长臂通过电磁作用吸附在后端板上。其中,导向板和柔性抓手的后端板均为电磁体,可通过调整通电方向控制导向板和柔性抓手之间吸附和排斥,当柔性抓手远离导向板时,第一超弹性体处于拉伸状态,抓取完成后,柔性抓手在第一超弹性体的作用下被拉回至导向板。
所述柔性臂设有8个,柔性臂内部设有呈细柱状结构的磁吸性金属。
所述蓄力装置包括蓄力室,所述蓄力室内设有蓄电池和电磁装置,所述蓄电池与电磁装置连接。其中,蓄力装置给导向板提供远离挡板的拉力,使第二超弹性体处于拉伸状态,蓄电池用于提供能量,电磁装置通电后产生磁力;电磁装置与第一超弹性体连接。
所述转向装置包括底座、立柱、第一电机和第二电机,所述第一电机安装在底座上,第一电机的输出轴与立柱连接,第二电机安装在立柱的顶部,第二电机的输出轴与蓄力装置连接。其中,第一电机的输出轴通过螺栓与立柱连接,可实现立柱、蓄力装置和发射装置的水平转动,第二电机的输出轴与蓄力室通过螺栓连接,可实现蓄力装置和发射装置在竖直方向的转动。
所述传感装置包括红外传感器和总处理器,所述红外传感器设置在发射装置上,红外传感器与总处理器电性连接。其中,红外传感器通过将物体的距离、运动参数等信息传输给总处理器,总处理器输出信号控制转向装置转动,调整发射装置的角度,控制蓄力装置调整蓄力距离。
一种仿蜥蜴目动物的柔性快速抓取方法,包括:传感装置对目标物的位置参数和运动参数,转向装置控制蓄力装置和发射装置的角度,导向板受到电磁装置的磁力,第二超弹性体拉伸积累应变能;电磁装置断电,导向板和柔性抓手加速运动,导向板被限制在发射口,柔性抓手射出并抓取目标物,抓到目标物的柔性抓手在第一超弹性体的拉力下返回到发射导管。整个超弹性体驱动的弹射-回收过程在Abaqus中仿真可行。
本仿蜥蜴目动物的柔性快速抓取装置的工作过程可分为三个阶段:准备阶段,发射阶段,回收阶段。在准备阶段,电磁装置启动,与导向板互相排斥,排斥力将导向板和柔性抓手推向挡板处;红外传感器对太空垃圾的位置参数和运动参数进行检测,总处理器通过对数据进行处理,控制转向装置和蓄力装置进行角度调整和蓄力操作;转向装置通过控制第一电机进行水平角度的调整,控制第二电机进行竖直角度的调整。蓄力装置中的电磁装置根据总处理器发出的信号提供相应的电磁吸力,导向板受到电磁吸力沿发射导管朝吸力方向移动,同时拉动第二超弹性体产生形变积累应变能。在发射阶段,蓄力距离达到设定值,导向板失去磁吸力,此时在第二超弹性体的拉动下,导向板和柔性抓手沿发射导管加速运动,导向板在挡板的限位作用下停止向前运动,柔性抓手加速射出,完成发射阶段。柔性抓手射出后,飞向目标物,当距离进入设定范围时,后端板停止施加电磁吸附力,柔性臂在扭簧的作用力下舒展开来,对目标物进行抓取。抓取目标物后,柔性抓手在第一超弹性体的作用下返程,重新回到发射导管中,将目标物带回。
本发明相对于现有技术,具有以下有益效果:
本仿蜥蜴目动物的柔性快速抓取装置解决了现阶段对于太空垃圾回收处理的难题,本装置利用超弹性体为整个柔性抓手提供发射过程和回收过程的动能,速度响应快。在对太空垃圾进行捕捉时,柔性抓手和目标物之间产生柔性接触,这一过程对太空垃圾造成的冲击性小,对太空垃圾造成的损伤小,可实现太空垃圾回收再利用。发射装置利用传感器将视觉信号作为发射装置的角度调整和超弹性体拉伸形变的基础,结合动力学轨迹控制保证了发射装置的准确性。
附图说明
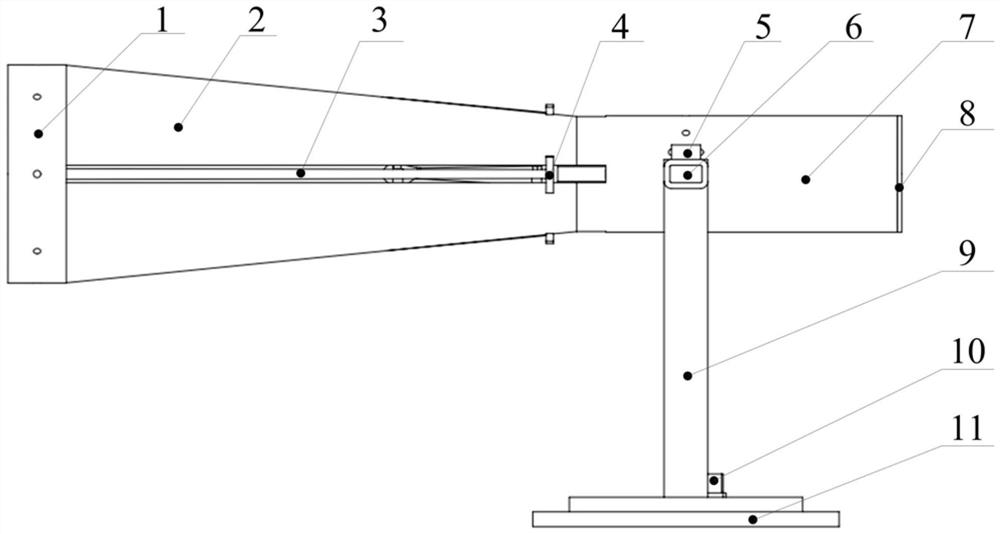
图1为本仿蜥蜴目动物的柔性快速抓取装置的结构示意图。
图2为发射装置和蓄力装置的剖视图。
图3为本仿蜥蜴目动物的柔性快速抓取装置的左视图。
图4为本仿蜥蜴目动物的柔性快速抓取装置的右视图。
图5为柔性抓手在收起状态下的结构示意图。
图6为柔性抓手的柔性臂在释放状态下的结构示意图。
图7为柔性抓手在抓取状态下的结构示意图。
图8为柔性抓手在另一种抓取状态下的结构示意图。
图9为超弹性体材料的弹射-回程仿真效果图。
为了便于统一查看说明书附图里面的各个附图标记,现对说明书附图里出现的附图标记统一说明如下:
1为挡板,2为发射导管,3为第二超弹性体,4为导向板,5为红外传感器,6为第二电机,7为蓄力室,8端盖,9为立柱,10为第一电机,11为底座,12为柔性抓手,13为第一超弹性体,14为电磁装置,15为蓄电池,121为传感器,122为前端板,123为控制器,124为柔性臂,125为后端板。
具体实施方式
下面结合实施例,对本发明作进一步的详细说明,但本发明的实施方式不限于此。
实施例
本实施例一种仿蜥蜴目动物的柔性快速抓取装置,如图1-4所示,包括发射装置、蓄力装置、转向装置和传感装置,所述转向装置控制发射装置和蓄力装置的方向,所述发射装置包括柔性抓手12、导向板4和发射导管2,所述导向板设置在发射导管内,蓄力装置与柔性抓手之间连接有第一超弹性体13,导向板还与第二超弹性体3连接,蓄力装置对导向板施加外力,使导向板拉伸第二超弹性体蓄能。
所述发射装置还包括挡板1,所述发射导管的一端为发射口,发射导管的另一端连接蓄力装置,所述柔性抓手设置在导向板朝向发射口的一侧,导向板上设有通孔,所述第一超弹性体穿过通孔,发射口处设置挡板,挡板和导向板之间连接有第二超弹性体,所述第一超弹性体和第二超弹性体均采用超弹性绳体。其中,第二超弹性体设有4个,4个第二超弹性体均匀布置,挡板通过螺钉与发射导管连接,挡板用于阻挡导向板,发射时,导向板在挡板的限位作用下在发射口处停止向前运动。
所述发射导管内设有若干导向槽,所述导向板与导向槽相配合,导向板在发射导管内轴向移动,导向板为电磁体。其中,导向槽用于限制导向板的自由度,避免导向板沿径向旋转,导向槽设有四个,四个导向槽均布在发射导管的侧壁上。
如图5-8所示,所述柔性抓手12包括前端板122、后端板125、柔性臂124、控制器123和传感器121,柔性臂包括相接的长臂和短臂,所述柔性臂均布在前端板的外周,柔性臂的短臂与前端板通过扭簧连接,控制器设置在前端板和后端板之间,传感器设置在前端板上,传感器与控制器电性连接。其中,传感器用于判断是否捕捉到物体,当捕捉到物体时,传感器将信息传输给控制器,控制器断电使后端板失去磁性,由于吸附作用消失和扭簧恢复力,柔性臂将快速实现反向合并捕捉物体。
所述柔性臂的内部设有磁吸性金属,柔性臂的外表面包覆有硅胶,后端板为电磁体,在柔性抓手收起状态下,柔性臂的长臂通过电磁作用吸附在后端板上。其中,导向板和柔性抓手的后端板均为电磁体,可通过调整通电方向控制导向板和柔性抓手之间吸附和排斥,当柔性抓手远离导向板时,第一超弹性体处于拉伸状态,抓取完成后,柔性抓手在第一超弹性体的作用下被拉回至导向板。
所述柔性臂设有8个,柔性臂内部设有呈细柱状结构的磁吸性金属。
所述蓄力装置包括蓄力室7,所述蓄力室内设有蓄电池15和电磁装置14,蓄力室的一端还设有端盖8,所述蓄电池与电磁装置连接。其中,蓄力装置给导向板提供远离挡板的拉力,使第二超弹性体处于拉伸状态,蓄电池用于提供能量,电磁装置通电后产生磁力;电磁装置与第一超弹性体连接。
所述转向装置包括底座11、立柱9、第一电机10和第二电机6,所述第一电机安装在底座上,第一电机的输出轴与立柱连接,第二电机安装在立柱的顶部,第二电机的输出轴与蓄力装置连接。其中,第一电机的输出轴通过螺栓与立柱连接,可实现立柱、蓄力装置和发射装置的水平转动,第二电机的输出轴与蓄力室通过螺栓连接,可实现蓄力装置和发射装置在竖直方向的转动。
所述传感装置包括红外传感器5和总处理器,所述红外传感器设置在发射装置上,红外传感器与总处理器电性连接。其中,红外传感器通过将物体的距离、运动参数等信息传输给总处理器,总处理器输出信号控制转向装置转动,调整发射装置的角度,控制蓄力装置调整蓄力距离。
一种仿蜥蜴目动物的柔性快速抓取方法,包括:传感装置对目标物的位置参数和运动参数,转向装置控制蓄力装置和发射装置的角度,导向板受到电磁装置的磁力,第二超弹性体拉伸积累应变能;电磁装置断电,导向板和柔性抓手加速运动,导向板被限制在发射口,柔性抓手射出并抓取目标物,抓到目标物的柔性抓手在第一超弹性体的拉力下返回到发射导管。整个超弹性体驱动的弹射-回收过程在Abaqus中仿真可行,如图9所示为超弹性体的弹射-回程仿真效果图。
本仿蜥蜴目动物的柔性快速抓取装置的工作过程可分为三个阶段:准备阶段,发射阶段,回收阶段。在准备阶段,电磁装置启动,与导向板互相排斥,排斥力将导向板和柔性抓手推向挡板处;红外传感器对太空垃圾的位置参数和运动参数进行检测,总处理器通过对数据进行处理,控制转向装置和蓄力装置进行角度调整和蓄力操作;转向装置通过控制第一电机进行水平角度的调整,控制第二电机进行竖直角度的调整。蓄力装置中的电磁装置根据总处理器发出的信号提供相应的电磁吸力,导向板受到电磁吸力沿发射导管朝吸力方向移动,同时拉动第二超弹性体产生形变积累应变能。在发射阶段,蓄力距离达到设定值,导向板失去磁吸力,此时在第二超弹性体的拉动下,导向板和柔性抓手沿发射导管加速运动,导向板在挡板的限位作用下停止向前运动,柔性抓手加速射出,完成发射阶段。柔性抓手射出后,飞向目标物,当距离进入设定范围时,后端板停止施加电磁吸附力,柔性臂在扭簧的作用力下舒展开来,对目标物进行抓取。抓取目标物后,柔性抓手在第一超弹性体的作用下返程,重新回到发射导管中,将目标物带回。
如上所述,便可较好地实现本发明,上述实施例仅为本发明的较佳实施例,并非用来限定本发明的实施范围;即凡依本发明内容所作的均等变化与修饰,都为本发明权利要求所要求保护的范围所涵盖。
- 一种仿蜥蜴目动物的柔性快速抓取装置及方法
- 一种仿象鼻结构柔性抓取装置