一种便携式微小型单旋翼无人机
文献发布时间:2023-06-19 10:41:48
技术领域
本发明涉及无人机技术领域,具体涉及一种便携式微小型单旋翼无人机。
背景技术
随着信息技术的发展,在现代化战争中,操作简单、方便携带、功能强大的无人飞行器备受各国重视;针对单兵作战的特殊需求,研制了一款便于士兵携带且性能强大的飞行器。目前杯状无人机大都采用共轴双桨的结构,双桨存在的问题是:机动性差,无法满足高机动作战的需求,且双桨结构抗风性能差,无法满足多变的作战场景。
发明内容
本发明的目的在于提供一种便携式微小型单旋翼无人机,该无人机抗风性能强,且便于携带。
实现本发明目的的技术解决方案为:一种便携式微小型单旋翼无人机,包括无人机外壳、单螺旋桨和传动杆,无人机外壳内部安装有电机、第一固定板、第二固定板、第三固定板、电池、自动驾驶仪系统、第一空气舵面、第二空气舵面、第三空气舵面、第四空气舵面以及4个舵机;所述单螺旋桨安装于传动杆上端,且传动杆下端与电机输出轴相连接,电机依托于无人机外壳内的第一固定板,所述自动驾驶仪系统和电池分别置于无人机外壳内的第二固定板的上下面,所述舵机安装在第三固定板上,所述第一空气舵面、第二空气舵面、第三空气舵面和第四空气舵面安装于第三固定板下方无人机外壳部分的外壁,分别由相应的舵机控制。
优选地,所述第一固定板、第二固定板和第三固定板上具有穿线孔外和通风孔。
优选地,所述自动驾驶仪系统包含内置IMU的飞控模块以及数据传输模块。
优选地,所述自动驾驶仪系统和电池通过魔术贴粘连和绑带固定于第二固定板的上下面。
优选地,所述第一空气舵面和第二空气舵面对称安装于无人机外壳外壁相对两侧,第三空气舵面和第四空气舵面对称安装于无人机外壳外壁另外两侧。
优选地,所述单螺旋桨可拆卸安装于与传动杆上端。
优选地,所述无人机外壳为杯状。
本发明与现有技术相比,其显著优点为:本无人机不仅能满足无人机的基本要求,且采用单螺旋桨,并在无人机外壳体外侧壁上安装了对称的四个空气舵面,增强了抗风能力;本发明结构简单,操作方便,便于携带。
附图说明
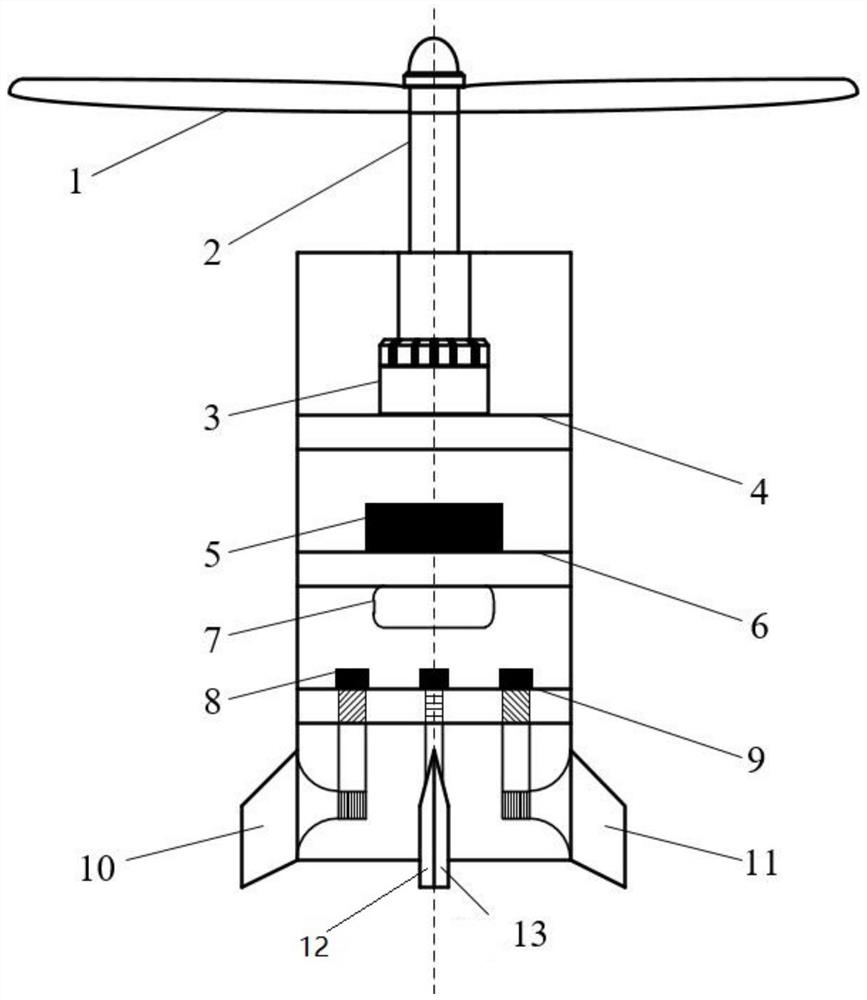
图1为本发明无人机结构图。
具体实施方式
下面将结合本发明专利中的附图,对本发明中所实施的技术进行完整、清楚的描述,显然,所描述的仅仅是本发明中的大部分,而不是全部的。
一种便携式微小型单旋翼无人机,包括无人机外壳、单螺旋桨1、传动杆2、电机3、第一固定板4、第二固定板6、第三固定板9、电池7、自动驾驶仪系统5、第一空气舵面10、第二空气舵面11、第三空气舵面12、第四空气舵面13以及若干舵机8;所述单螺旋桨1可拆卸安装于与传动杆2上端,且传动杆2下端与电机3输出轴相连接,电机3依托于无人机外壳内的第一固定板4,所述自动驾驶仪系统5包含内置IMU的飞控模块以及数传模块,所述自动驾驶仪系统5和电池7分别置于无人机外壳内的第二固定板6的上下面,通过魔术贴粘连和绑带固定于第二固定板6的上下面,所述舵机8安装在第三固定板9上,所述第一空气舵面10和第二空气舵面11对称安装于无人机外壳外壁左右两侧,第三空气舵面12和第四空气舵面13对称安装于无人机外壳外壁前后两侧,所述第一固定板4、第二固定板6和第三固定板9除了打相应的穿线孔外,还附有额外的通风孔进行散热等。
当使用该便携式微小型单旋翼无人机时,将单螺旋桨1可拆卸安装在传动轴2上端,电机3安装在第一固定板4上,自动驾驶仪系统5安装在第二固定板6上平面,第二固定板6下平面和电池7单面用魔术贴进行粘连并用绑带固定,舵机8安装在第三固定板9上,第一空气舵面10、第二空气舵面11安装于无人机外壳相对两侧,第三空气舵面12和第四空气舵面13安装于另外两侧。单螺旋桨1旋转产生升力的同时,并产生向下的气流,由牛顿力学第三定律可知,单螺旋桨1在水平方向对空气产生推力的同时会受到空气的反作用力,这个反作用力作用到机体上就是反扭矩,反扭距的存在会使得无人机产生自旋,为了消除反扭距,本设计在无人机外壳体外侧壁上安装了对称的四个空气舵面,通过舵机控制空气舵面的旋转来消除反扭距,并且可以控制无人机的前进方向,通过无人机外壳内自动驾驶仪系统5中集成的传感器实时采集飞行器的位置信息和姿态信息,并通过无线数据传输模块实时回传飞行器状态信息。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
- 一种便携式微小型单旋翼无人机
- 一种海事巡逻单旋翼无人机旋翼振动实验台