一种正压防爆系统
文献发布时间:2023-06-19 10:44:55
技术领域
本发明涉及机器人领域,尤其涉及一种正压防爆系统。
背景技术
工业机器人的应用是一个国家工业自动化水平的重要标志。随着现代科技的迅速发展,工业机器人已经广泛应用于各个领域,而在可燃性粉尘环境中,由于可燃性粉尘是易燃易爆物质,遇到火花或达到一定温度,可能发生爆炸,造成严重后果,因此通用型机器人需要进行防爆处理才能在可燃性粉尘环境中应用。
防爆机器人的应用,不仅可提高产品的质量和产量,而且对保障人身安全、改善劳动环境、减轻劳动强度、提高劳动效率、节约原材料消耗以及降低生产成本,具有着重要意义,同时对我国向智能型工业发展起到了积极的促进作用。因此,正压防爆机器人的研制具有重要的社会效益、经济意义和广阔的应用前景。
发明内容
本发明的目的是提供一种实现自动化防爆的正压防爆系统。
实现本发明目的的技术方案是:一种正压防爆系统,包括正压防爆柜体、机器人防爆壳体、气源输入管和气路组件;所述正压防爆柜体包括第一正压腔;所述机器人防爆壳体包括第二正压腔和第三正压腔;所述第一正压腔、第二正压腔和第三正压腔分别通过一个气路组件与气源输入管连通,各个气路组件分别向第一正压腔、第二正压腔和第三正压腔持续或间断输入气体;所述第一正压腔、第二正压腔和第三正压腔分别连通有向外部定压排气的第一自动泄压阀、第二自动泄压阀和第三自动泄压阀;所述第一正压腔、第二正压腔和第三正压腔分别设有第一压差传感器和第二压差传感器和第三压差传感器。
所述机器人防爆壳体的第二正压腔由机器人大臂壳体的内壁构成;所述第三正压腔由副臂密封壳体的内壁构成。
所述气路组件包括第一支管、手动球阀和电磁阀;所述机器人大臂壳体上分别设有与第二正压腔连通的第一进气端口和第一排气端口;所述第一排气端口上设置有第一自动泄压阀;所述副臂密封壳体上设有与第三正压腔连通的第二进气端口和第二排气端口;所述第一支管输入端与气源输入管连通,第一支管的输出端与第一进气端口或第二进气端口连通;所述第二排气端口上设置有第二自动泄压阀;所述手动球阀和电磁阀均设于第一支管上。
所述气路组件还包括溢流调节阀;所述溢流调节阀通过气路支管与气源输入管连接,并且溢流调节阀的输入端和输出端分别与电磁阀的输入端和输出端连通。
所述气源输入管上设有减压阀;所述减压阀上设有气体过滤器。
所述机器人大臂壳体的第一排气端口至少设有两个;所述副臂密封壳体的第二排气端口至少设有两个。
所述机器人防爆壳体的机器人大臂壳体包括基座密封壳体、大臂连接部,以及分别设置在大臂连接部两侧的一轴安装部和二轴安装部;所述基座密封壳体呈顶部敞口的筒状体,并且顶部与大臂连接部连通;所述基座密封壳体侧壁上设有与基座密封壳体内腔连通的气盒;所述第一进气端口设于气盒上;所述一轴安装部和二轴安装部上分别罩设有一轴电机防爆壳和二轴电机防爆壳;所述主臂密封壳体中设有主臂气道;所述主臂气道与大臂连接部、一轴电机防爆壳和二轴电机防爆壳内腔连通;所述一轴电机防爆壳和二轴电机防爆壳上各设置有连通内腔的第一排气端口。
所述副臂密封壳体包括依次活动连接的三四轴壳体、四轴臂、五轴壳体和六轴壳体;所述三四轴壳体、四轴臂、五轴壳体和六轴壳体内腔依次连通;所述三四轴壳体设置有连通内腔的第二进气端口;所述三四轴壳体、五轴壳体和六轴壳体上各设置有第二排气端口。
采用了上述技术方案,本发明具有以下的有益效果:本发明通过气路组件对第一正压腔、第二正压腔和第三正压腔输入气体,使第一正压腔、第二正压腔和第三正压腔中形成正压,避免危险气体或粉末进入第一正压腔、第二正压腔和第三正压腔中,实现自动化正压防爆,大大提高正压防爆柜体、机器人防爆壳体在工作时的安全性。
附图说明
为了使本发明的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本发明作进一步详细的说明,其中
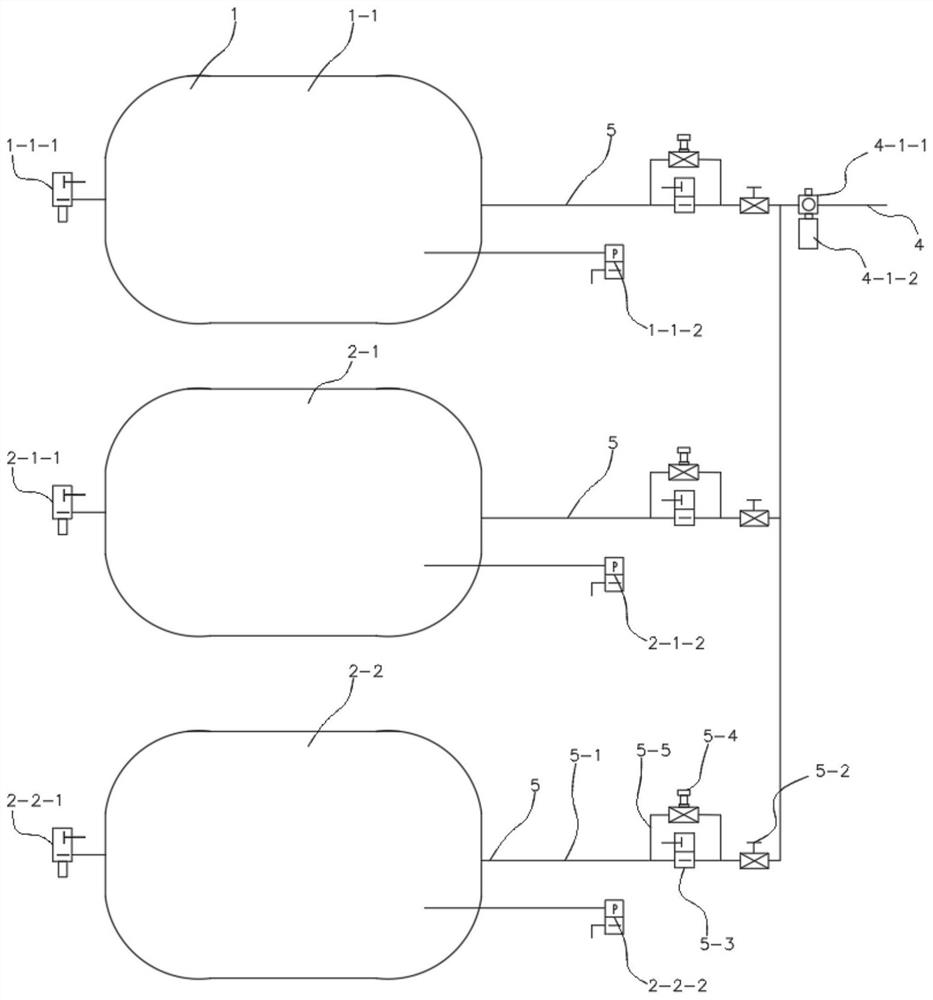
图1为本发明的气路示意图;
图2为本发明的机器人防爆壳体的结构示意图;
图3为本发明的大臂连接部的剖视图。
附图标号为:
正压防爆柜体1、第一正压腔1-1、第一自动泄压阀1-1-1、第一压差传感器1-1-2;
机器人防爆壳体2、第二正压腔2-1、第二自动泄压阀2-1-1、第二压差传感器2-1-2、第三正压腔2-2、第三自动泄压阀2-2-1、第三压差传感器2-2-2;
机器人大臂壳体2-3、基座密封壳体2-3-1、大臂连接部2-3-2、一轴安装部2-3-3、二轴安装部2-3-4、一轴电机防爆壳2-3-5、二轴电机防爆壳2-3-6、主臂气道2-3-7、气盒2-3-8;
副臂密封壳体2-4、三四轴壳体2-4-1、四轴臂2-4-2、五轴壳体2-4-3、六轴壳体2-4-4;
气源输入管4、减压阀4-1-1、气体过滤器4-1-2;
气路组件5、第一支管5-1、手动球阀5-2、电磁阀5-3、溢流调节阀5-4、气路支管5-5。
具体实施方式
实施例一
见图1至图3,本实施例的正压防爆系统,包括正压防爆柜体1、机器人防爆壳体2、气源输入管4和气路组件5。正压防爆柜体1包括第一正压腔1-1。机器人防爆壳体2包括第二正压腔2-1和第三正压腔2-2。第一正压腔1-1、第二正压腔2-1和第三正压腔2-2分别通过一个气路组件5与气源输入管4连通,各个气路组件5分别向第一正压腔1-1、第二正压腔2-1和第三正压腔2-2持续或间断输入气体。第一正压腔1-1、第二正压腔2-1和第三正压腔2-2分别连通有向外部定压排气的第一自动泄压阀1-1-1、第二自动泄压阀2-1-1和第三自动泄压阀2-2-1。第一正压腔1-1、第二正压腔2-1和第三正压腔2-2分别设有第一压差传感器1-1-2和第二压差传感器2-1-2和第三压差传感器2-2-2。
机器人防爆壳体2的第二正压腔2-1由机器人大臂壳体2-3的内壁构成。第三正压腔2-2由副臂密封壳体2-4的内壁构成。
气路组件5包括第一支管5-1、手动球阀5-2和电磁阀5-3。机器人大臂壳体2-3上分别设有与第二正压腔2-1连通的第一进气端口和第一排气端口。第一排气端口上设置有第一自动泄压阀5-1。副臂密封壳体2-4上设有与第三正压腔2-2连通的第二进气端口和第二排气端口。第一支管5-1输入端与气源输入管4连通,第一支管5-1的输出端与第一进气端口或第二进气端口连通。第二排气端口上设置有第二自动泄压阀6-1。手动球阀5-2和电磁阀5-3均设于第一支管5-1上。
气路组件5还包括溢流调节阀5-4。溢流调节阀5-4通过气路支管5-5与气源输入管4连接,并且溢流调节阀5-4的输入端和输出端分别与电磁阀5-3的输入端和输出端连通。
气源输入管4上设有减压阀4-1-1。减压阀4-1-1上设有气体过滤器4-1-2。
机器人大臂壳体2-3的第一排气端口至少设有两个。副臂密封壳体3-1的第二排气端口至少设有两个。
机器人防爆壳体2的机器人大臂壳体2-3包括基座密封壳体2-3-1、大臂连接部2-3-2,以及分别设置在大臂连接部2-3-2两侧的一轴安装部2-3-3和二轴安装部2-3-4。基座密封壳体2-3-1呈顶部敞口的筒状体,并且顶部与大臂连接部2-3-2连通。基座密封壳体2-3-1侧壁上设有与基座密封壳体2-3-1内腔连通的气盒2-3-8。第一进气端口设于气盒2-3-8上。一轴安装部2-3-3和二轴安装部2-3-4上分别罩设有一轴电机防爆壳2-3-5和二轴电机防爆壳2-3-6。主臂密封壳体2-1中设有主臂气道2-3-7。主臂气道2-3-7与大臂连接部2-3-2、一轴电机防爆壳2-3-5和二轴电机防爆壳2-3-6内腔连通。一轴电机防爆壳2-3-5和二轴电机防爆壳2-3-6上各设置有连通内腔的第一排气端口。
副臂密封壳体3-1包括依次活动连接的三四轴壳体2-4-1、四轴臂2-4-2、五轴壳体2-4-3和六轴壳体2-4-4。三四轴壳体2-4-1、四轴臂2-4-2、五轴壳体2-4-3和六轴壳体2-4-4内腔依次连通。三四轴壳体2-4-1设置有连通内腔的第二进气端口。三四轴壳体2-4-1、五轴壳体2-4-3和六轴壳体2-4-4上各设置有第二排气端口。
具体实施时,第一正压腔1-1、第二正压腔2-1和第三正压腔2-2各自连接的气路组件5各自进行工作,互相不同步进行。在气路组件5工作为第一正压腔1-1、第二正压腔2-1或第三正压腔2-2提供正压,电磁阀5-3开启,气源通过第一支管5-1上的减压阀4-1-1减压后进入第一正压腔1-1、第二正压腔2-1或第三正压腔2-2中,第一自动泄压阀1-1-1、第二自动泄压阀2-1-1或第三自动泄压阀2-2-1开启,对第一正压腔1-1、第二正压腔2-1或第三正压腔2-2进行换气,排出第一正压腔1-1、第二正压腔2-1或第三正压腔2-2中的危险气体或粉末,在换气结束后,电磁阀5-3持续开启,第一自动泄压阀1-1-1、第二自动泄压阀2-1-1或第三自动泄压阀2-2-1关闭,对第一正压腔1-1、第二正压腔2-1或第三正压腔2-2充气,待充气结束后电磁阀5-3关闭,通过溢流调节阀5-4对第一正压腔1-1、第二正压腔2-1或第三正压腔2-2补充气体,保持第一正压腔1-1、第二正压腔2-1或第三正压腔2-2正压。
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 正压型防爆控制系统及正压型防爆配电柜
- 一种正压防爆控制柜的正压防爆机构