一种水下机器人
文献发布时间:2023-06-19 10:46:31
技术领域
本发明涉及的是一种机器人,具体涉及一种水下机器人。
背景技术
水下机器人是一种具备一定耐受水压能力,可在水下灵活游动的机械化智能化无人载具。水下机器人可在高度危险环境、被污染环境以及零可见度的水域代替人工在水下长时间作业,广泛应用于海洋渔业、水下考古、水文监测等场合。现有的水下机器人的结构设计不合理,特别是用于打捞失联潜标的水下机器人,一旦出现故障,会大大影响其打捞效率,综上所述,本发明设计了一种使用方便可靠的水下机器人。
发明内容
针对现有技术上存在的不足,本发明目的是在于提供一种水下机器人,结构精巧,航速高、航程大、续航时间长、姿态稳定性强,使用方便可靠,实用性强。
为了实现上述目的,本发明是通过如下的技术方案来实现:一种水下机器人,包括第一推进器、第二推进器、液压剪、双频声波换能器、第一高频声波换能器、第二高频声波换能器和水密舱,水密舱两侧分别设置有第一推进器、第二推进器,第一推进器前端连接有第一高频声波换能器,第二推进器的前端连接有第二高频声波换能器,水密舱的前端设置有液压剪;所述的水密舱内部设置有减速电机、磷酸铁锂电池包和中央运算控制器。
作为优选,所述的双频声波换能器与第一高频声波换能器、第二高频声波换能器通信连接。
作为优选,所述的中央运算控制器与第一高频声波换能器、第二高频声波换能器、减速电机控制连接。
作为优选,所述的水密舱采用TC4钛合金,壁厚28mm,承受水压100MPa。
本发明的有益效果:本发明的结构精巧,航速高、航程大、续航时间长、姿态稳定性强,使用方便可靠,实用性强。
附图说明
下面结合附图和具体实施方式来详细说明本发明;
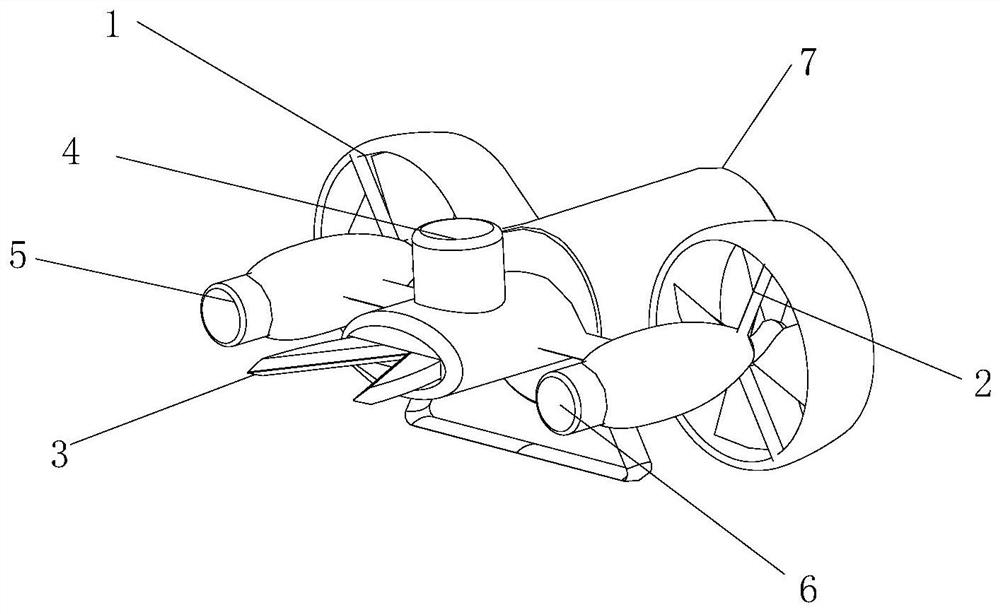
图1为本发明的结构示意图;
图2为本发明的水密舱内部结构示意图。
具体实施方式
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
参照图1-2,本具体实施方式采用以下技术方案:一种水下机器人,包括第一推进器1、第二推进器2、液压剪3、双频声波换能器4、第一高频声波换能器5、第二高频声波换能器6和水密舱7,水密舱7两侧分别设置有第一推进器1、第二推进器2,第一推进器1前端连接有第一高频声波换能器5,第二推进器2的前端连接有第二高频声波换能器6,水密舱7的前端设置有液压剪3;所述的水密舱7内部设置有减速电机8、磷酸铁锂电池包9和中央运算控制器10。
所述的双频声波换能器4与第一高频声波换能器5、第二高频声波换能器6通信连接。
所述的中央运算控制器10与第一高频声波换能器5、第二高频声波换能器6、减速电机8控制连接。
所述的水密舱7采用TC4钛合金,壁厚28mm,承受水压100MPa。本具体实施方式的第一推进器1、第二推进器2为水下机器人输出动力的同时运动控制方向。中央运算控制器10调整第一推进器1、第二推进器2的电机相对转数实现水下机器人6在水中灵活转向与精准定向航行。双频声波换能器4交替发出(600kHz)高频声波、发出接收(12kHz)低频声波。(12kHz)低频声波用于与低频声波测距通讯换能器2进行测距与通讯。(600kHz)高频声波为第一高频声波接收换能器5、第二高频声波接收换能器6提供声源。第一高频声波接收换能器5、第二高频声波接收换能器5接收双频声波换能器10发出的(600kHz)高频声波遇到障碍物反射回来的声信号,将两个存在时间差、相位差声信号转化为电信号传输给中央运算控制器10。中央运算控制器10接收到第一高频声波接收换能器5、第二高频声波接收换能器6传送的电信号进行运算,确定水下机器人的位置.
本具体实施方式的结构精巧,航速高、航程大、续航时间长、姿态稳定性强,使用方便可靠,实用性强。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 水下机器人供能系统、水下机器人及水下机器人群系统
- 一种水下机器人组件以及水下机器人