无人机电池组自动化换装系统
文献发布时间:2023-06-19 10:46:31
技术领域
本发明是无人机自动化管理技术领域,具体的说是无人机电池组自动化换装系统。
背景技术
无人机自动化管理在电力系统领域属于业界技术前沿,涵盖无人机、人工智能、机器人、自动化、信息通信等技术,是一种多学科交叉融合的高新技术。近年来,无人机自动化管理已成为输电线路的重要自动化管理手段,自动化管理效益和质量较传统人工自动化管理有显著提高。
在无人机输电线路自动化管理实际应用中,国内一些电网公司进行了相关试点研究工作。2015年福建电网开展了基于物联网技术的大型无人机系统在电网巡视和防灾减灾中的应用,建立了在山区高温潮湿条件下大型无人直升机低速自动化管理模式,初步实现了超视距测控、高精度三维程控飞行、超低空自主避障和动态高清拍照等多项技术。2018年山东电网研发了无人机全自主精细化自动化管理技术,该技术包括规划飞行轨迹、任务载荷拍照控制、图像自主命名归档、缺陷自主智能识别等功能,实现了单无人机自动化管理由“人工”控制到“自主”飞行的转变。2018年,冀北电网研发了“龙巢”无人机全自主智能自动化管理系统,该系统通过在现场设置智能平台,并综合应用了航线设计规划、数据采集、结果分析处理等全过程技术,实现了单无人机的自主智能自动化管理与智能自维护。与国内相比,国外在无人机输电线路自动化管理方面的应用尚不多见。2018年,欧洲公用事业公司开始探索远程控制无人机搜寻电网损坏情况的可能性,欧洲多个公司都对无人机进行了测试,但现阶段大多数欧洲电力公司仍使用直升机巡视方式来检查电网设备运行状态。美国、日本等发达国家在无人机输电线路自动化管理中报道较少。由上述情况可知,无人机自动化管理在国外电网中应用处于起步阶段,而在国内取得了一些应用成果,但在多无人机群协同、移动式无人机自动化管理系统、完整信息交互系统(与电网公司相关管理系统对接)等方面研发与应用仍处于空白状态,亟需开展相应技术攻关。
现有的无人机供电方式多采用电池供电,无人机在使用一段时间后需要更换电池,而目前更换电池时需要对无人机进行定位,调整无人机至合适的姿势后,再进行更换电池,目前定位,只能大多只能通过人工操作,误差较大。即便现有的无人机换电技术也存在诸多弊端和缺陷。
例如,中国实用新型专利201820108833.3无人机电池更换电置和无人机电池更换设备中,无人机电池更换电置包括承载机构、升降机构、电池更换平台、旋转机构和电池装取机构;电池更换平台上设有电池充电座组;承载机构、旋转机构、升降机构依次连接;导轨的一端与电池更换平台连接,另一端与电池充电座连接,电池充电单元为两个,两个相对设置,一个电池充电座内的电池充满电,另一个未装电池,电池充电座能够沿导轨移动,电池装取机构将一个电池充电座内的电池推送到无人机的电池内,且将无人机的电池推送至另一个电池充电座内。其缺点是无法同时进行多台无人机配备多个足够数量的电池,换电效率较低,难以满足大规模无人机使用的快速换电的要求。
中国实用新型专利201620906736.X一种无人机电池更换系统,包括电池充电机构、电池更换机构、控制装置和无人机。电池充电机构包括支架、多个电池充电夹;电池更换机构包括底座和夹紧装置,夹紧装置转动设置在底座上,夹紧装置用于无人机在更换电池时加持电池;无人机上设置有电池盒子,内装有为无人机控制系统和第一电机供电的电池。无人机在自动飞行过程检测到电池电量不足时,无人机控制系统控制无人机返航并精准降落到基站,然后控制装置控制电池更换机构的夹紧装置取出电池盒子中的电池,并插入空闲的电池充电夹中进行充电,然后夹紧装置夹取电池充电机构中一个充满电的电池并将其准确放入无人机的电池盒子中,达到更换电池的目的。但是其换电结构较为复杂且容易损坏,不具备良好的推广价值。
中国公开发明专利申请201910997352.1无人机的电池自动更换设备,其包括设置于无人机内并用于对无人机内的电池进行夹持安装的夹持装置、与无人机相配套并用于对其进行电池更换的更换设备,更换设备包括箱体,箱体为一端开口、一端封闭且开口端匹配安装有箱盖的矩形箱体结构,箱体内安装有支撑感应机构、更换电置、撤销装置、控制器,支撑感应机构用于对无人机进行支撑作用并可将支撑信号传递给控制器,控制器用于控制更换电置与撤销装置的运行状况,撤销装置的自由端可经撤销孔伸入至无人机内并用于使夹持装置撤销对无人机内电池的夹持,更换电置用于使新电池替换无人机内电池。但是该技术方案结构复杂,只能适用于特定机型,并且耗时很长,且难以满足多台无人机快速轮流换电的需求。
发明内容
本发明要解决的技术问题是提供无人机电池组自动化换装系统,该种无人机电池组自动化换装系统能够通过换电机械手总成对位于预定位置无人机的电池组进行抓取,并将取出的无人机电池组置入电池存放系统的电池舱内进行充电,还能够通过换电机械手总抓取电池舱已经充满电的电池组,并将满电电池组置入无人机内,实现对批量无人机电池组的更换。
为解决上述技术问题,本发明采用的技术方案为:
无人机电池组自动化换装系统,其特征是:包括骨架总成、升降系统总成、换电机械手总成和电池存放系统,所述的骨架总成为框架式制成结构,所述的骨架总成内安装有升降系统总成,所述的换电机械手总成与升降系统总成传动连接,所述的升降系统总成用于带动换电机械手总成在竖直方向上实现位移,所述的电池存放系统与骨架总成侧壁固定连接,所述的换电机械手总成用于对无人机内的电池组进行更换,所述的电池存放系统用于存放无人机电池组;
所述的换电机械手总成包括托盘总成和对中机械手总成,所述的托盘总成通过伸缩装置和旋转装置与对中机械手总成传动连接,所述的伸缩装置用于带动对中机械手总成伸缩运动,所述的旋转装置用于带动对中机械手总成相对托盘总成转动,所述的对中机械手总成包括用于抓取无人机电池组的机械手,所述的对中机械手总成用于控制机械手对无人机电池的夹取和脱离。
所述的换电机械手总成还包括一级平台总成、二级平台总成和旋转台总成;
所述的二级平台总成与对中机械手总成传动连接,所述的二级平台总成用于带动对中机械手总成伸缩运动;
所述的旋转台总成与一级平台总成固定连接,所述的旋转台总成用于带动二级平台总成伸缩运动,所述的旋转台总成用于带动一级平台总成和二级平台总成相对转动;
所述的一级平台总成与托盘总成传动连接,所述的托盘总成用于带动一级平台总成伸缩运动;
所述的托盘总成与升降系统总成传动连接,所述的升降系统总成用于电动托盘总成在竖直方向往复运动。
所述的升降系统总成包括若干根竖直设置的丝杆,所述的丝杆的数量不少于3根,相邻丝杆 相互平行,每根丝杆的一端与分减速器的输出轴传动连接,丝杆的另一端通过轴承座与骨架总成固定连接,分减速器的输入轴与相邻分减速器的输出轴传动连接或与主减速器的输出轴传动连接,所述的主减速器的输入轴与电机总成的输出轴传动连接。
所述的分减速器的输入轴与相邻分减速器的输出轴之间通过传动轴传动连接,传动轴两端均通过联轴器与分减速器的输出轴或输入轴固定连接。
所述的骨架总成包括若干根竖直设置的骨架固定立柱,相邻骨架固定立柱之间设置有骨架侧纵梁或中横梁实现连接加固,所述的骨架固定立柱的底端固定安装有骨架下横梁,所述的骨架固定立柱的顶端固定安装有骨架上横梁,所述的骨架总成的顶端内边缘均匀设置有若干个丝杆轴承座安装板,所述的丝杆轴承座安装板数量与丝杆数量相同,所述的丝杆一端的轴承座固定安装在丝杆轴承座安装板下表面,所述的骨架总成的底部两侧均固定安装有基座安装板,两组基座安装板相对边的边缘分别固定安装有左支撑架总成和右支撑架总成,所述的基座安装板、左支撑架总成和右支撑架总成用于固定主减速器、电机总成和分减速器;
所述的骨架总成的两侧设置有电池箱立柱,所述的电池箱立柱的顶端通过电池箱上横梁与骨架固定立柱固定连接,所述的电池箱立柱内用于存放电池存放系统。
所述的托盘总成包括托盘底板,所述的托盘底板的两侧向外延伸形成托举台,所述的丝杆与法兰螺母螺纹连接,所述的法兰螺母与托举台固定连接,所述的丝杆转动时通过带动法兰螺母相对丝杆转动进而带动托举台在竖直方向上移动,所述的托盘底板的上表面上方设置有一级平台平移驱动丝杠,所述的一级平台平移驱动丝杠的两端通过一级平台平移丝杠底座固定安装在托盘底板上表面,所述的一级平台平移驱动丝杠一端与一级平台平移电机的输出轴传动连接,所述的一级平台平移驱动丝杠的两侧设置有一级平台平移导轨。
所述的一级平台总成包括一级平台基板,所述的一级平台基板的下表面固定安装有平移螺母,所述的平移螺母与一级平台平移驱动丝杠螺纹连接,所述的平移螺母的两侧设置有平移滑块,所述的平移滑块与一级平台平移导轨滑动连接。
所述的旋转台总成包括固定平台和旋转平台,所述的旋转平台通过旋转轴固定安装在固定平台的上方,所述的旋转平台通过旋转台驱动蜗轮蜗杆与旋转台驱动电机总成传动连接,所述的固定平台与一级平台总成的一级平台基板固定连接,所述的旋转平台上方固定安装有二级平台平移丝杠,所述的二级平台平移丝杠的一端与二级平台平移电机的输出轴传动连接,所述的二级平台平移丝杠的两侧设置有二级平台平移导轨。
所述的二级平台总成包括二级平台停机坪,所述的二级平台停机坪下表面固定安装有与二级平台平移丝杠螺纹连接的二级平台平移螺母,所述的二级平台平移螺母的两侧固定安装有二级平台平移滑块,所述的二级平台平移滑块与二级平台平移导轨滑动连接,所述的二级平台停机坪前端向外延伸形成电池导向板总成,所述的电池导向板总成上表面固定安装有装卸电池手指,所述的二级平台停机坪的上方通过舵机安装支架总成与舵机总成固定连接,所述的舵机总成与装卸电池手指传动连接并用于控制装卸电池手指的工作状态,所述的二级平台停机坪的侧面还固定安装有对中机械手总成平移导轨和对中机械手总成驱动丝杠,所述的对中机械手总成驱动丝杠一端与对中机械手总成平移电机的输出轴传动连接。
所述的对中机械手总成包括对中架总成,所述的对中架总成为框架结构,所述的对中架总成的底部通过对中机械手总成移动滑块与对中机械手总成平移导轨滑动连接,所述的中架总成底部还固定安装有对中机械手平移螺母,所述的对中机械手平移螺母与对中机械手总成驱动丝杠螺纹连接,所述的机械手固定安装在对中架总成内,所述的对中架总成上固定安装有光电感应器总成,所述的机械手上方固定安装有光电感应片,所述的光电感应片和光电感应器总成用于对机械手的机械臂的行程终端进行限位,所述的对中架总成上固定安装有对中电机总成,所述的对中电机总成与机械手的机械臂传动连接并用于控制机械手的机械臂的工作状态。
所述的机械手包括左取电机械手和右取电机械手,所述的左取电机械手通过左撑板与上齿条固定连接,所述的右取电机械手通过右撑板与下齿条固定连接,所述的上齿条与上线性导轨滑动连接,所述的下齿条与下线性导轨滑动连接,所述的上线性导轨和下线性导轨相对设置且均与对中架总成固定连接,所述的下齿条和上齿条相对设置且分布在对中齿轮两侧,所述的下齿条和上齿条均与对中齿轮啮合传动连接,所述的对中齿轮与对中电机总成的输出轴传动连接。
所述的机械手的上方固定安装有光幕,所述的光幕固定安装在骨架上横梁边缘,所述的光幕用于检测无人机是否安全位于正确位置。
所述的电池存放系统包括若干块电池总成,每块电池总成均可分离的嵌入电池舱内,所述的电池总成的两侧设置用用于固定电池总成的电池固定板,电池定位板一侧固定安装有若干适配器总成和若干电池充电器,所述的适配器总成和电池充电器用于为嵌入电池舱内的电池总成充电,所述的电池总成边缘设置有电池舱开关总成,所述的电池舱开关总成用于对嵌入电池舱内的电池总成进行限位。
所述的电池舱开关总成包括电池舱旋转臂,所述的电池舱旋转臂的中部穿过固定转轴,所述的电池舱旋转臂能够围绕固定转轴转动,所述的电池舱旋转臂一端与电池总成端面接触,另一端通过活动转轴与取电池开关轴可转动连接,所述的取电池开关轴一端与回位弹簧同轴固定连接。
所述的电池舱开口端外侧设置有门总成,所述的门总成的顶端边缘与门线性模组传动连接,所述的门线性模组的驱动端与门电机总成的输出端传动连接,所述的门电机总成通过驱动门线性模组进而带动门总成沿门线性模组轴线方向滑动,实现门总成对电池舱开口端的遮挡或暴露。
该种无人机电池组自动化换装系统能够产生的有益效果为:第一,通过多级平台的平移和旋转运动相结合,能够在小空间内完成无人机电池组的取放和位置调整,并通过多组传感器来自动实现无人机电池组的换电作业,效率更高,即只要无人机的停放位置在换电机械手的运动行程范围内,均可进行换电作业,使在有限空间内多机型多电池组的换电成为可能。
第二,无人机电池组自动化换装系统极大提高了自动化管理作业自主性、自动化和智能化水平,使无人机自动化管理作业安全性更高、效率更高、推广性更强,减轻运检人员劳动强度,大幅度降低运维成本。
第三,无人机电池组自动化换装系统可显著提高线路自动化管理自动化、智能化水平,提高自动化管理效率,提升电网安全性。为电网管理获得更高的经济效益、安全效益和社会效益。
第四,无人机上的电池组卡扣与电池组的相对位置、取电池开关轴与电池舱的相对位置均和对中机械手与装卸电池手指的相对位置相同,因此,通过舵机总成控制装卸电池手指能够推动无人机上的电池组卡扣或取电池开关轴,保证电池组能够顺利由电池舱或无人机内取出。
附图说明
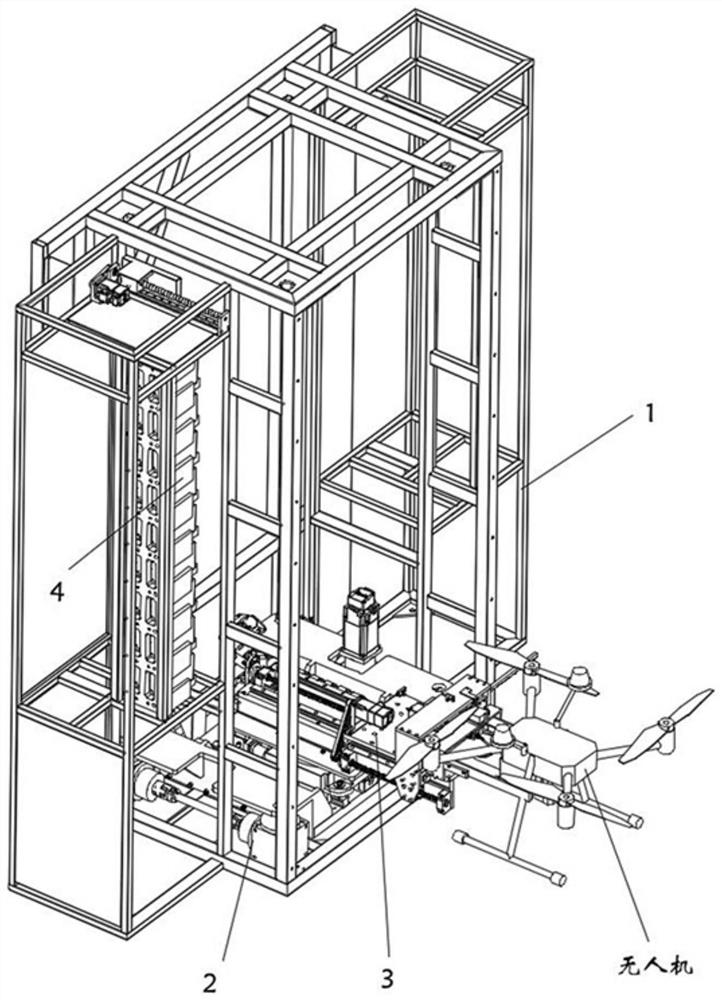
图1为本发明无人机电池组自动化换装系统的结构原理图。
图2为本发明无人机电池组自动化换装系统中骨架总成的结构原理图。
图3为本发明无人机电池组自动化换装系统中升降系统总成的结构原理图。
图4为本发明无人机电池组自动化换装系统中换电机械手总成的结构原理图。
图5为本发明无人机电池组自动化换装系统中托盘总成的结构原理图。
图6为本发明无人机电池组自动化换装系统中一级平台总成的结构原理图。
图7为本发明无人机电池组自动化换装系统中二级平台总成的结构原理图。
图8为本发明无人机电池组自动化换装系统中旋转台总成的结构原理图。
图9为本发明无人机电池组自动化换装系统中机械手总成的结构原理图。
图10为本发明无人机电池组自动化换装系统中电池存放系统的结构原理图。
图11为本发明无人机电池组自动化换装系统中电池舱开关总成的结构原理图。
图12为本发明无人机电池组自动化换装系统中门线性模组总成的结构原理图。
图13为本发明无人机电池组自动化换装系统中升降组总成下方与骨架总成连接结构示意图。
图14为本发明无人机电池组自动化换装系统中升降组总成上方与骨架总成连接结构示意图。
图15为本发明无人机电池组自动化换装系统中换电机械手总成与升降系统总成连接结构示意图。
图16为本发明无人机电池组自动化换装系统中电池组装配系统与骨架总成连接结构示意图。
说明书附图说明:1、骨架总成,2、升降系统总成,3、换电机械手总成,4、电池存放系统,10、电池箱立柱, 11、电池箱上横梁, 12、丝杆轴承座安装板, 13、骨架上横梁,14、骨架固定立柱,15、骨架侧纵梁,16、骨架中横梁,17、骨架下横梁,18、基座安装板,19 、左支撑架总成,110、右支撑架总成,111、光幕,20、丝杆轴承座,21、丝杆,24、分减速器,26、轴联轴器,27、传动轴,29、主减速器,210、电机总成,211、法兰螺母,30、托盘总成,301、托举台,302、一级平台平移电机,303、电机安装支架, 304、一级平台平移驱动丝杠,305、一级平台平移丝杠底座,306、一级平台平移导轨,31、一级平台总成,310、一级平台平移螺母, 311、一级平台平移滑块,32、二级平台总成,320、装卸电池手指, 321、电池导向板总成, 322、二级平台停机坪,323、对中机械手总成平移电机, 324、对中机械手总成驱动皮带,325、对中机械手总成驱动丝杠,326、对中机械手总成平移导轨,327、二级平台平移滑块,328、舵机安装支架总成,329、舵机总成,33、旋转台总成,330、二级平台平移丝杠,331、二级平台平移导轨,332、二级平台平移电机,333、二级平台驱动皮带,334、旋转台驱动电机总成,335、旋转台驱动蜗轮蜗杆,34、对中机械手总成,340、对中电机总成,341、对中架总成,342、光电感应片,343、光电感应器总成,345、下线性导轨,346、右撑板,347、右取电机械手,348 、对中机械手平移螺母,349、左取电机械手,350、左撑板,351、对中机械手总成移动滑块,352、对中齿轮,353、上齿条,354、下齿条,355、上线性导轨,40、适配器总成,41、电池定位板,42、电池充电器,43、电池总成,44、电池舱开关总成,45、电池固定板,440、电池舱旋转臂,441、取电池开关轴,442、回位弹簧,443、固定转轴,444、活动转轴,5、门线性模组总成,50、门电机总成,51、门电机同步带,52、门总成,53、移动门丝杆,54、移动门导轨。
具体实施方式
以下结合说明书附图和具体优选的实施例对本发明作进一步描述。
如图1所示,无人机电池组自动化换装系统,其特征是:包括骨架总成1、升降系统总成2、换电机械手总成3和电池存放系统4,所述的骨架总成1为框架式制成结构,所述的骨架总成1内安装有升降系统总成2,所述的换电机械手总成3与升降系统总成2传动连接,所述的升降系统总成2用于带动换电机械手总成3在竖直方向上实现位移,所述的电池存放系统4与骨架总成1侧壁固定连接,所述的换电机械手总成3用于对无人机内的电池组进行更换,所述的电池存放系统4用于存放无人机电池组;
所述的换电机械手总成3包括托盘总成30和对中机械手总成34,所述的托盘总成30通过伸缩装置和旋转装置与对中机械手总成34传动连接,所述的伸缩装置用于带动对中机械手总成34伸缩运动,所述的旋转装置用于带动对中机械手总成34相对托盘总成30转动,所述的对中机械手总成34包括用于抓取无人机电池组的机械手,所述的对中机械手总成34用于控制机械手对无人机电池的夹取和脱离。
如图4所示,本实施例中,换电机械手总成3还包括一级平台总成31、二级平台总成32和旋转台总成33;所述的二级平台总成32与对中机械手总成34传动连接,所述的二级平台总成32用于带动对中机械手总成34伸缩运动;所述的旋转台总成33与一级平台总成31固定连接,所述的旋转台总成33用于带动二级平台总成32伸缩运动,所述的旋转台总成33用于带动一级平台总成31和二级平台总成32相对转动;所述的一级平台总成31与托盘总成30传动连接,所述的托盘总成30用于带动一级平台总成31伸缩运动;所述的托盘总成30与升降系统总成2传动连接,所述的升降系统总成2用于电动托盘总成30在竖直方向往复运动。
托盘总成30与一级平台总成31之间的伸缩装置、旋转台总成33与二级平台总成32之间的伸缩装置以及对中机械手总成34 内控制机械手的伸缩装置共同组成了三级伸缩结构,极大减小机械手结构的所占的空间尺寸,同时还时机械手的运动行程范围得到了保证。旋转台总成33的设置则能够使机械手在位于不同侧面的无人机和电池舱之间往复运动。
如图3所示,本实施例中,升降系统总成2包括四根竖直设置的丝杆21,相邻丝杆21相互平行,每根丝杆21的一端与分减速器24的输出轴传动连接,丝杆21的另一端通过轴承座20与骨架总成1固定连接,分减速器24的输入轴与相邻分减速器24的输出轴传动连接或与主减速器29的输出轴传动连接,所述的主减速器29的输入轴与电机总成210的输出轴传动连接。
分减速器24的输入轴与相邻分减速器24的输出轴之间通过传动轴27传动连接,传动轴27两端均通过联轴器26与分减速器24的输出轴或输入轴固定连接。
进一步的,主减速器29的输出轴一般为一根或两根,当主减速器29的输出轴为两根时,可以主减速器29的输出轴可以同时为两组分减速器24提供动力,剩余的两组分减速器24由相邻分减速器24顺次提供动力,最终使各个分减速器24与丝杆21连接的输出轴转速相同。同理当主减速器29的输出轴为一根时,也可通过将剩余分减速器24的顺次提供动力,实现各个分减速器24与丝杆21连接的输出轴转速相同。
进一步的,通过丝杆21驱动对中机械手总成34在竖直方向上移动并不是唯一实施方案,包括但不限于气压驱动、液压驱动等现有同步驱动方案均可被认为落入本申请保护范围内。
如图2所示,本实施例中,骨架总成1包括若干根竖直设置的骨架固定立柱14,相邻骨架固定立柱14之间设置有骨架侧纵梁15或中横梁16实现连接加固,所述的骨架固定立柱14的底端固定安装有骨架下横梁17,所述的骨架固定立柱14的顶端固定安装有骨架上横梁13,所述的骨架总成1的顶端内边缘均匀设置有若干个丝杆轴承座安装板12,所述的丝杆轴承座安装板12数量与丝杆21数量相同,所述的丝杆21一端的轴承座20固定安装在丝杆轴承座安装板12下表面,所述的骨架总成1的底部两侧均固定安装有基座安装板18,两组基座安装板18相对边的边缘分别固定安装有左支撑架总成19和右支撑架总成110,所述的基座安装板18、左支撑架总成19和右支撑架总成110用于固定主减速器29、电机总成210和分减速器24;所述的骨架总成1的两侧设置有电池箱立柱10,所述的电池箱立柱10的顶端通过电池箱上横梁11与骨架固定立柱14固定连接,所述的电池箱立柱10内用于存放电池存放系统4。
竖直设置的骨架固定立柱14构成了骨架总成1的外框架主体,同一侧的骨架固定立柱14相邻之间通过骨架侧纵梁15固定连接,提高结构强度,位于两侧的骨架固定立柱14之间顶部通过骨架上横梁13连接,底部通过骨架下横梁17连接,中间位置则通过位于后侧的中横梁16实现连接加固,外框架主体前侧面则不存在加固件,为对中机械手总成34留出了位移空间。
如图5所示,本实施例中,托盘总成30包括托盘底板,所述的托盘底板的两侧向外延伸形成托举台301,所述的丝杆21与法兰螺母211螺纹连接,所述的法兰螺母211与托举台301固定连接,所述的丝杆21转动时通过带动法兰螺母211相对丝杆21转动进而带动托举台301在竖直方向上移动,如图15所示,所述的托盘底板的上表面上方设置有一级平台平移驱动丝杠304,所述的一级平台平移驱动丝杠304的两端通过一级平台平移丝杠底座305固定安装在托盘底板上表面,所述的一级平台平移驱动丝杠304一端与一级平台平移电机302的输出轴传动连接,所述的一级平台平移驱动丝杠304的两侧设置有一级平台平移导轨306,所述的一级平台平移电机302通过电机安装支架303固定安装在托盘底板上表面,所述的一级平台平移导轨306与一级平台平移驱动丝杠304平行。
如图6所示,本实施例中,一级平台总成31包括一级平台基板,所述的一级平台基板的下表面固定安装有平移螺母310,所述的平移螺母310与一级平台平移驱动丝杠304螺纹连接,所述的平移螺母310的两侧设置有平移滑块311,所述的平移滑块311与一级平台平移导轨306滑动连接。
一级平台总成31作为连接旋转台总成33和托盘总成30的过度装置,一级平台总成31底部连接托盘总成30的伸缩结构,顶部连接旋转台总成33的旋转结构,保证了两种传动结构的平顺连接。
如图8所示,本实施例中,旋转台总成33包括固定平台和旋转平台,所述的旋转平台通过旋转轴固定安装在固定平台的上方,所述的旋转平台通过旋转台驱动蜗轮蜗杆335与旋转台驱动电机总成334传动连接,所述的固定平台与一级平台总成31的一级平台基板固定连接,所述的旋转平台上方固定安装有二级平台平移丝杠330,所述的二级平台平移丝杠330的一端与二级平台平移电机332的输出轴传动连接,所述的二级平台平移丝杠330的两侧设置有二级平台平移导轨331。所述的二级平台平移丝杠330的两端通过轴承座固定安装在旋转平台表面,二级平台平移丝杠330的一端通过二级平台驱动皮带333与二级平台平移电机332的输出轴传动连接,所述的二级平台平移导轨331与二级平台平移丝杠330平行设置。
旋转台总成33的旋转平台的行程重点为电池存放系统4,电池舱竖直排列,保证了机械手位于正面时,能够对中实现对无人机内电池组的抓取,位于侧面时,能够对电池舱内的电池组进行抓取。
如图7所示,本实施例中,二级平台总成32包括二级平台停机坪322,所述的二级平台停机坪322下表面固定安装有与二级平台平移丝杠330螺纹连接的二级平台平移螺母,所述的二级平台平移螺母的两侧固定安装有二级平台平移滑块327,所述的二级平台平移滑块327与二级平台平移导轨331滑动连接,所述的二级平台停机坪322前端向外延伸形成电池导向板总成321,所述的电池导向板总成321上表面固定安装有装卸电池手指320,所述的二级平台停机坪322的上方通过舵机安装支架总成328与舵机总成329固定连接,所述的舵机总成329与装卸电池手指320传动连接并用于控制装卸电池手指320的工作状态,所述的二级平台停机坪322的侧面还固定安装有对中机械手总成平移导轨326和对中机械手总成驱动丝杠325,所述的对中机械手总成驱动丝杠325一端与对中机械手总成平移电机323的输出轴传动连接。所述的对中机械手总成驱动丝杠325两端均通过轴承座固定安装在二级平台停机坪322的侧面,所述的对中机械手总成驱动丝杠325一端通过对中机械手总成驱动皮带324与对中机械手总成平移电机323的输出轴传动,两组对中机械手总成平移导轨326分别设置在二级平台停机坪322的两侧,对中机械手总成平移导轨326均与对中机械手总成驱动丝杠325平行。
如图9所示,本实施例中,对中机械手总成34包括对中架总成341,所述的对中架总成341为框架结构,所述的对中架总成341的底部通过对中机械手总成移动滑块351与对中机械手总成平移导轨326滑动连接,所述的中架总成341底部还固定安装有对中机械手平移螺母348,所述的对中机械手平移螺母348与对中机械手总成驱动丝杠325螺纹连接,所述的机械手固定安装在对中架总成341内,所述的对中架总成341上固定安装有光电感应器总成343,所述的机械手上方固定安装有光电感应片342,所述的光电感应片342和光电感应器总成343用于对机械手的机械臂的行程终端进行限位,所述的对中架总成341上固定安装有对中电机总成340,所述的对中电机总成340与机械手的机械臂传动连接并用于控制机械手的机械臂的工作状态。
机械手包括左取电机械手349和右取电机械手347,所述的左取电机械手349通过左撑板350与上齿条353固定连接,所述的右取电机械手347通过右撑板346与下齿条354固定连接,所述的上齿条353与上线性导轨355滑动连接,所述的下齿条354与下线性导轨345滑动连接,所述的上线性导轨355和下线性导轨345相对设置且均与对中架总成341固定连接,所述的下齿条354和上齿条353相对设置且分布在对中齿轮352两侧,所述的下齿条354和上齿条353均与对中齿轮352啮合传动连接,所述的对中齿轮352与对中电机总成340的输出轴传动连接。
进一步的,一级平台平移驱动丝杠304、二级平台平移丝杠330和对中机械手总成驱动丝杠325相互平行,均能够在对应的电机控制器的驱动下做精准的伸缩运动,多组伸缩装置的采用不仅减小了换电机械手总成3的轴向尺寸,三组驱动电机的同步工作还能够提高机械手的位移效率。机械手上方安装的光电感应片342和光电感应器总成343能够使两组机械臂精准稳定的夹取无人机电池组,能够防止较大机械臂在夹取电池时的较大的驱动力造成机械臂或电池组的损伤。下齿条354和上齿条353相对设置且分布在对中齿轮352两侧并对中齿轮352啮合传动连接,保证了下齿条354和上齿条353在对中齿轮352转动时能够朝向相反的方向移动,同时带动左取电机械手349和右取电机械手347执行夹取运动或松开运动。
进一步的,该装置中通过采用驱动电机作为驱动装置使丝杠、齿条等执行件实现伸缩运动或旋转运动并不是唯一实施方案,包括但不限于气压驱动、液压驱动等现有可往复驱动方案均可被认为落入本申请保护范围内。
如图14所示,本实施例中,机械手的上方固定安装有光幕111,所述的光幕111固定安装在骨架上横梁13边缘,所述的光幕111用于检测无人机是否安全位于正确位置。
在控制过程中,光幕111用于检测无人机电机的端面是否越过光幕111,在无人机对中之后,越过光幕111的电池组能够被同样对中后的机械手抓取。进一步的,该种光幕111能够检测竖直方向上的所有位置,即使该种换电装置能够为位于不同高度的无人机进行换电。
如图10所示,本实施例中,电池存放系统4包括若干块电池总成43,每块电池总成43均可分离的嵌入电池舱内,所述的电池总成43的两侧设置用用于固定电池总成43的电池固定板45,电池定位板41一侧固定安装有若干适配器总成40和若干电池充电器42,所述的电池固定板45和电池总成43设置在电池定位板41另一侧,所述的适配器总成40和电池充电器42用于为嵌入电池舱内的电池总成43充电,所述的电池总成43边缘设置有电池舱开关总成44,所述的电池舱开关总成44用于对嵌入电池舱内的电池总成43进行限位。
如图11所示,本实施例中,电池舱开关总成44包括电池舱旋转臂440,所述的电池舱旋转臂440的中部穿过固定转轴443,所述的电池舱旋转臂440能够围绕固定转轴443转动,所述的电池舱旋转臂440一端与电池总成43端面接触,另一端通过活动转轴444与取电池开关轴441可转动连接,所述的取电池开关轴441一端与回位弹簧442同轴固定连接。
当左取电机械手349和右取电机械手347对中运动到电池舱前方时,舵机总成329推动装卸电池手指320一端,此时杠杆结构的装卸电池手指320另一端向前探出,推动取电池开关轴441,并使回位弹簧442处于压缩状态,此时取电池开关轴441向内运动,带动电池舱旋转臂440向外转动并使电池舱旋转臂440一端脱离电池组端面,电池舱旋转臂440的限位功能消失,此时,左取电机械手349和右取电机械手347相向运动夹紧电池组侧壁可将电池组由电池舱内取出。同理,机械手也可以采用同样的方式将电池组由无人机内取出。
如图12所示,本实施例中,电池舱开口端外侧设置有门总成52,所述的门总成52的顶端边缘与门线性模组5传动连接,所述的门线性模组5的驱动端与门电机总成50的输出端传动连接,所述的门电机总成50通过驱动门线性模组5进而带动门总成52沿门线性模组5轴线方向滑动,实现门总成52对电池舱开口端的遮挡或暴露。所述的门线性模组5包括移动门丝杆53,所述的,门总成52通过门平移螺母与移动门丝杆53传动连接,所述的门平移螺母与移动门丝杆53螺纹连接,所述的门总成52与通过边缘滑块与移动门导轨54滑动连接,所述的移动门导轨54与移动门丝杆53相互平行,所述的门电机总成50的包括驱动电机和减速器,所述的驱动电机的输出轴与减速器的输入轴传动连接,减速器的输出轴与移动门丝杆53一端通过门电机同步带51传动连接。
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
- 无人机电池组自动化换装系统
- 无人机电池组自动化换装系统