用于交通工具自主远程控制或手动操作的交通工具控制系统
文献发布时间:2023-06-19 10:49:34
技术领域
所提出的实施方式涉及一种用于控制交通工具的交通工具控制系统。所提出的实施方式还涉及一种操作这种交通工具控制系统的方法。
背景技术
常规的交通工具控制系统可以用于任何交通工具。例如,这样的交通工具控制系统可以用于:航天器或航空器,例如宇宙飞船、飞机、直升机等;陆地上运行的交通工具,例如轿车、公共汽车、卡车、火车等;或者船舶,例如大型船只、小型船只、气垫船或潜水艇。
交通工具控制系统通常设置有机械控制运动学器件和伺服辅助控制单元,它们由诸如控制杆、操纵杆、侧杆、踏板、方向盘等适当关联的操纵器(inceptor)进行控制。
在可在诸如空气或水等流动介质中控制的交通工具中经常使用人工力感生成装置。换言之,在航天器、航空器或船舶中使用人工力感生成装置。
举例来说,用于航空器的人工力感生成装置通常适于为指定的伺服辅助控制单元(例如方向舵)的操纵器生成人工启动力(breakout force)并且为了便于飞行员控制此操纵器而生成额外的可选人工力梯度。人工启动力和额外的可选人工力梯度是飞行员在将操纵器从预定的中立位置移动到飞行员期望的相应的操作位置所需要克服的力。
预定的中立位置是与航空器的优选运动方向对应的操纵器的位置,其特征通常在于其中没有力作用在操纵器上。换言之,在操作中不需要将力施加到操纵器上来将其保持在其中立位置。
当操纵器在从中立位置到相应的期望操作位置移动的过程中经过所谓的配平点时,人工启动力和额外的可选人工力梯度的摇晃感(例如,定中和/或锚定)通常变得可被航空器的飞行员注意到。该配平点是可滑动的,即可借助于配平连接器和/或配平马达在限定的控制范围内调节。然而,为了使飞行员能够灵敏地控制航空器,由人工力感生成装置生成的人工力(即,人工启动力和额外的可选人工力梯度)应该相对适中。
文献EP3069990A1描述了一种交通工具控制系统,其具有用于在交通工具控制系统的操纵器上生成人工力感的人工力感生成装置,所述操纵器适于经由机械连杆机构控制所述交通工具控制系统的伺服辅助控制单元,其中至少一个第一力生成装置和至少一个第二力生成装置机械连接至所述操纵器,所述第一力生成装置被设置为用于生成在操作中作用在所述操纵器上的力,所述第二力生成装置被设置为用于生成在操作中作用在所述操纵器上的触觉提示力,所述第一和第二力生成装置并联布置。
在文献EP2266878B1、EP2311729A1和US2010/0123045A1中描述了其他的示例性人工力感生成装置。在这些人工力感生成装置中,通过飞行员施加到对应的操纵器上的力由外力或压力传感器测量,以基于所测得的力来控制所述装置。
有时,可能需要提供有人或无人地操作交通工具的能力。如果自动飞行控制系统(AFCS)与航空器一起使用,则通常使用人工启动力来支持AFCS致动器信号在操纵器上的相应输入。因此,可通过这种AFCS施加到操纵器上的力受到人工启动力的限制。
在航空器的操作中,对人工启动力进行的任何克服或额外的可选人工力梯度范围内的运动通常被AFCS评估为飞行员的有意干预,因此会导致AFCS操作模式暂时性减弱,从而防止飞行员和AFCS彼此对抗。
对于远程控制或自主的操作,必须改装常规的交通工具控制系统,以便能够在没有交通工具操作者的情况下进行操作并且满足增加的安全性要求(例如在交通繁忙的区域中操作时)。例如,在这些交通工具控制系统中通常包括额外的致动器和传感器,从而能够处理通常由交通工具操作者处理的不同的失效情况。
不同的失效情况的例子可以包括稳定性缺失或减弱、伺服辅助控制单元卡阻、致动器卡阻或无法增强液压操作力。常规的交通工具控制系统使用了不同的方式应对这些问题。例如,用于航空器的一些交通工具控制系统设置了配平致动器的冗余布置和/或相对较慢且同时具有全行程能力的配平致动器以及双重自动飞行控制系统(AFCS)。
发明内容
因此,目的是提供一种用于控制交通工具的新型交通工具控制系统,其克服上述缺点并且能够实现交通工具的有人操作以及无人操作。另外的目的涉及提供一种操作这种新型交通工具控制系统的方法。此外,该新型交通工具控制系统优选是低成本的并且易于改装。
上述目的通过包括权利要求1的特征的一种交通工具控制系统以及一种操作这种交通工具控制系统的方法来解决,所述方法包括权利要求10的特征。更具体地,用于控制交通工具的交通工具控制系统包括:伺服辅助控制单元;机械连杆机构,其耦合至伺服辅助控制单元;操纵器,其适于经由机械连杆机构控制伺服辅助控制单元;第一力生成装置,其机械地连接至操纵器并被设置为用于生成在操作中作用在操纵器上的第一力;第二力生成装置,其与第一力生成装置并联地机械地连接至操纵器并被设置为用于生成在操作中作用在操纵器上的第二力;连接至操纵器的实操/无实操(hands-on/off)检测管理单元,其可配置为在有人操作模式或无人操作模式下操作,并基于对交通工具的手动或自动操作进行的检测而生成控制信号;以及解耦装置,其可基于控制信号进行操作并且耦合在第二力生成装置与操纵器之间,其中解耦装置将第二力生成装置与操纵器机械地解耦。
示例性地,可以将模块化装置添加到传统的交通工具控制系统和AFCS中,从而替代飞行员并实现自主的或远程控制的操作。
例如,替代飞行员的模块化装置可以安装在驾驶舱地板上方(例如,代替飞行员座位而安装)。再例如,模块化装置可以安装在驾驶舱地板下方。
举例来说,交通工具控制系统可包括触觉提示配平器。触觉提示配平器可以具有用作安全装置的离合器。
如果需要,交通工具控制系统可以具有用于检测是否存在交通工具操作者的冗余且不同的装置(例如,一个或多个传感器)。检测交通工具操作者是否存在和/或交通工具操作者是否将要干预交通工具控制系统的操作有时也被称为实操检测、无实操检测或实操/无实操检测。
特别地,检测到存在交通工具操作者并且检测到交通工具操作者将要干预交通工具控制系统的操作有时也称被为“交通工具操作者进行实操”。检测到不存在交通工具操作者或者检测到存在交通工具操作者并检测到交通工具操作者将不干预交通工具控制系统的操作有时也被称为“交通工具操作者无实操”。
示例性地,除了主AFCS之外,交通工具控制系统还可以包括副AFCS。如果需要,主AFCS和/或副AFCS可以具有直接连接以实现功率级,从而生成和处理触觉提示和/或在高速/高扭矩与低速/低扭矩之间切换。
操作交通工具控制系统的方法可以包括用于失效检测的操作和装置以及在检测到失效时将交通工具控制系统重新配置为无人操作模式的操作。例如,可以检测主AFCS和/或副AFCS的失效、液压伺服器的失效和/或高性能配平致动器(increased performancetrim actuator,IPTA)和/或传统配平致动器的卡阻。
响应于检测到主AFCS和/或副AFCS的失效、液压伺服器的失效和/或高性能配平致动器(IPTA)和/或传统配平致动器的卡阻,交通工具控制系统可以重新配置主AFCS和/或副AFCS、传统配平致动器、高性能配平致动器(IPTA)、串联机电致动器(SEMA)和/或高性能串联致动器(increased performance serial actuator,IPSA)。
如果需要,示例性的交通工具控制系统可以基于改装后的现有交通工具控制系统。例如,与现有交通工具控制系统相比,示例性的交通工具控制系统可以允许不变的有人操作。再例如,示例性的交通工具控制系统可以重新使用电传飞行控制(FBW)架构、现有的AFCS、现有的航空无线电公司(ARINC)的429总线线路、现有的机械控制液压伺服器和/或机械式飞行控制运动学器件。
举例来说,与现有的交通工具控制系统相比,示例性的交通工具控制系统可以包括额外的元件,以允许交通工具的远程控制的和/或自主的操作。例如,示例性的交通工具控制系统可以包括额外数量的总线线路(例如,ARINC429总线线路)、副AFCS和/或额外的致动器,例如高性能配平致动器(IPTA)。IPTA的速度能够在数量级上至少比传统的配平致动器的速度高出大约一倍。
示例性地,在公共空域内和/或居住区域上方,交通工具控制系统应该能够在失效率小于10
根据一个方面,机械连杆机构还包括耦合在操纵器和伺服辅助控制单元之间的至少一个串联机电致动器。
根据一个方面,当控制信号表示交通工具的自动操作并且实操/无实操检测管理单元被配置为在有人操作模式下操作时,实操/无实操检测管理单元停用第二力生成装置。
根据一个方面,第二力生成装置还包括至少一个马达驱动器,其中,当控制信号表示交通工具的自动操作并且实操/无实操检测管理单元被配置为在有人操作模式下操作时,实操/无实操检测管理单元指示至少一个马达驱动器停用第二力生成装置。
根据一个方面,第一力生成装置还包括:第一力生成装置中的机械力生成单元;第一力生成装置中的第一传感器,其耦合至机械力生成单元、基于对交通工具的手动或自动操作进行的检测来生成第一传感器信号,并将第一传感器信号发送至实操/无实操检测管理单元;以及与第一传感器不同并且耦合至操纵器的第二传感器,其中第二传感器基于对交通工具的手动或自动操作进行的检测来生成第二传感器信号,并将第二传感器信号发送至实操/无实操检测管理单元。
根据一个方面,解耦装置包括离合器,其在控制信号表示交通工具的自动操作时将第二力生成装置与操纵器解耦。
根据一个方面,当控制信号表示交通工具的手动操作时或者当第一力生成装置有缺陷时,离合器将第二力生成装置耦合至操纵器。
根据一个方面,交通工具控制系统还包括主运动控制系统,其适于驱动第一力生成装置和第二力生成装置。
根据一个方面,交通工具控制系统还包括:副运动控制系统,其独立于主运动控制系统并且适于驱动第二力生成装置;以及选择器电路,其耦合在主运动控制系统和副运动控制系统与第二力生成装置之间,其中选择器电路将主运动控制系统和副运动控制系统中的一个与第二力生成装置连接。
此外,一种对控制交通工具并且包括伺服辅助控制单元、耦合至伺服辅助控制单元的机械连杆机构、适于经由机械连杆机构控制伺服辅助控制单元的操纵器、机械地连接至操纵器的第一力生成装置、与第一力生成装置并联地机械地连接至操纵器的第二力生成装置、连接至操纵器的实操/无实操检测管理单元以及耦合在第二力生成装置和操纵器之间的解耦装置的交通工具控制系统进行操作的方法包括以下操作:将实操/无实操检测管理单元配置为在有人操作模式或无人操作模式下操作;响应于将实操/无实操检测管理单元配置为在有人操作模式下操作而使用实操/无实操检测管理单元生成表示交通工具操作者的手动干预的控制信号,并且基于来自实操/无实操检测管理单元的控制信号启用或停用第二力生成装置;以及响应于将实操/无实操检测管理单元配置为在无人操作模式下操作而使用自动运动控制系统控制交通工具的位置,使用实操/无实操检测管理单元生成表示交通工具控制系统的故障的控制信号,并且基于来自实操/无实操检测管理单元的控制信号来操作耦合在第二力生成装置和操纵器之间的解耦装置。
根据一个方面,基于来自实操/无实操检测管理单元的控制信号启用或停用第二力生成装置还包括:响应于表示交通工具操作者没有手动干预的控制信号将第二力生成装置与操纵器解耦。
如果需要,基于来自实操/无实操检测管理单元的控制信号启用或停用第二力生成装置可以包括:响应于表示交通工具操作者没有手动干预的控制信号,指示马达驱动器停用第二力生成装置以防止第二力生成装置生成触觉提示。
根据一个方面,使用实操/无实操检测管理单元生成表示交通工具控制系统的故障的控制信号以及基于控制信号操作耦合在第二力生成装置和操纵器之间的解耦装置还包括:使用第一力生成装置中的传感器检测伺服辅助控制单元的退化所引起的控制力增大;以及通过将第二力生成装置与操纵器耦合而使用第二力生成装置执行配平和稳定。
根据一个方面,该方法还包括:检测第一力生成装置的卡阻;通过将第二力生成装置与操纵器耦合而使用第二力生成装置执行配平;以及使用第一力生成装置中的额外的解耦装置将第一力生成装置与操纵器解耦。
根据一个方面,机械连杆机构包括串联机电致动器,并且该方法还包括:检测串联机电致动器的总损失;以及通过将第二力生成装置与操纵器耦合而使用第二力生成装置执行配平和稳定。
根据一个方面,该方法还包括:检测主运动控制系统的缺陷;以及使用耦合在自动运动控制系统和第二力生成装置之间的选择器电路从主运动控制系统切换到副运动控制系统,从而作为针对第二力生成装置的输入和针对串联机电致动器中的串联机电致动器的输入。
附图说明
在下面的说明中参照附图通过举例的方式概述实施方式。在这些附图中,相同或功能相同的部件和元件用相同的参考数字和字符标记,并因此在下面的说明中仅描述一次。
-图1是具有根据一些实施方式的交通工具控制系统的示例性旋翼航空器的示意图;
-图2A是根据一些实施方式的示例性交通工具控制系统的示意图,其具有安装在交通工具操作者水平上方的无人操作启用装置;
-图2B是根据一些实施方式的示例性交通工具控制系统的示意图,其具有安装在交通工具操作者水平下方的无人操作启用装置;
-图3A是根据一些实施方式的具有双联高性能配平致动器(IPTA)的示例性交通工具控制系统的示意图;
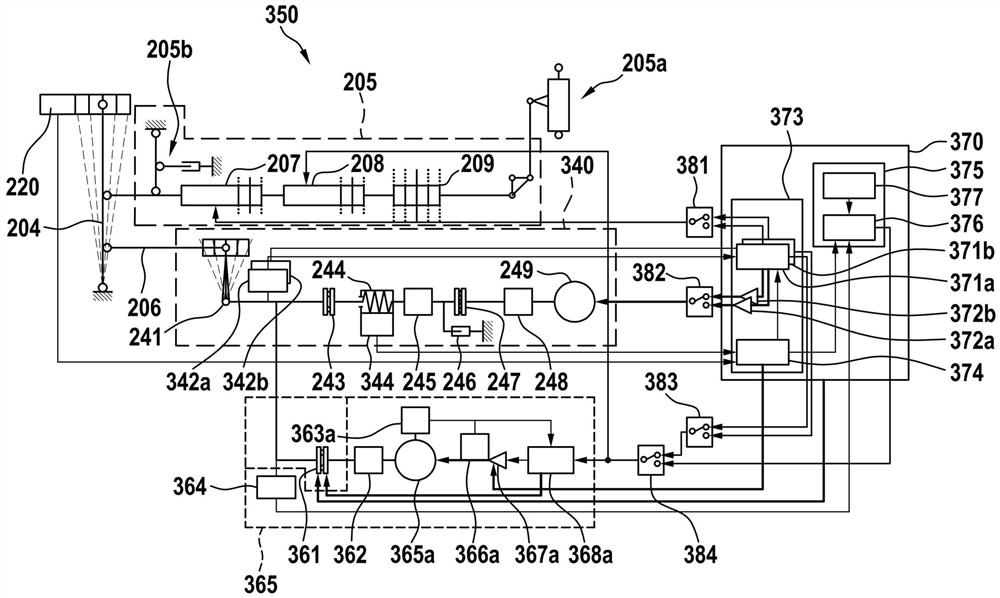
-图3B是根据一些实施方式的具有单联高性能配平致动器(IPTA)的示例性交通工具控制系统的示意图;
-图4是根据一些实施方式的具有双联高性能配平致动器(IPTA)和高性能串联致动器(IPSA)的示例性交通工具控制系统的示意图;
-图5是根据一些实施方式的具有失效情况的检测和重新配置的示例性交通工具控制系统的示意图;
-图6是根据一些实施方式的表示出配平致动器的卡阻的示例性交通工具控制系统的示意图;
-图7是根据一些实施方式的表示出主AFCS的损失或故障的示例性交通工具控制系统的示意图;
-图8A是示出了根据一些实施方式的交通工具控制系统可以针对控制交通工具而执行的示例性操作的流程图;
-图8B是示出了根据一些实施方式的交通工具控制系统在将实操/无实操检测管理单元配置为在有人操作模式下操作时可以执行的示例性操作的流程图;
-图8C是示出了根据一些实施方式的交通工具控制系统在将实操/无实操检测管理单元配置为在无人操作模式下操作时可以执行的示例性操作的流程图;
-图8D是示出了根据一些实施方式的交通工具控制系统在处理交通工具控制系统的故障时可以执行的示例性操作的流程图;
-图8E是示出了根据一些实施方式的用于检测和校正交通工具控制系统中的问题的示例性操作的流程图;
-图8F是示出了根据一些实施方式的用于检测和校正包括机械连杆机构中的串联机电致动器的交通工具控制系统中的问题的示例性操作的流程图;并且
-图8G是示出了根据一些实施方式的用于检测和校正包括机械连杆机构中的串联机电致动器以及自动运动控制系统中的主和副运动控制系统的交通工具控制系统中的问题的示例性操作的流程图。
具体实施方式
图1示出了交通工具100,其示例性表示为航空器,特别是旋翼航空器,更特别是直升机。因此,为了简单和清楚起见,交通工具100在下文中被称为“直升机”100。然而,应注意的是,所提出的实施方式不限于直升机,而是可以同样在独立于其特定构造之外应用于可在空中、陆地上或水中操作的任何其他交通工具。
示例性地,直升机100包括机身101a,其连接至起落架101c(例如被实施为轮式起落架)并限定尾梁101b。起落架也可以被滑撬代替。直升机100还包括用于在操作期间提供升力和前向、后向或侧向的推力的至少一个主旋翼102。
主旋翼102示例性被实施为包括在相关联的旋翼头部102c处安装到旋翼主轴102d上的多片旋翼桨叶102a、102b的多桨叶主旋翼,其在直升机100的操作中围绕由旋翼主轴102d限定的旋翼轴线旋转。
举例来说,直升机100还包括至少一个反扭矩装置103,其被配置为在操作期间提供反扭矩,即,抵抗由至少一个多桨叶主旋翼102的旋转产生的扭矩,以在偏航方面平衡直升机100。至少一个反扭矩装置103示例性地由尾梁101b尾部处的尾旋翼实现,因此在下文中也被称为“尾旋翼”103。
根据一个方面,直升机100包括用于在操作中控制至少一个多桨叶主旋翼102的旋翼桨叶102a、102b的总桨距和周期桨距的至少一个桨距控制单元104。该桨距控制单元104可以设置在直升机100的旋翼头部102c和机身101a之间。如果需要,桨距控制单元104可以通过旋转斜盘组件来实现。
应当注意,可以用于实现桨距控制单元104及其功能的合适的旋转斜盘组件是本领域技术人员公知的。因此,为了简单扼要,省略了对桨距控制单元104(即,旋转斜盘组件)的详细描述。
示例性地,桨距控制单元104得到相关联的伺服辅助控制单元105a(例如液压动力单元)的伺服辅助,该伺服辅助控制单元借助于操纵器104a经由相关联的机械连杆机构105来控制。应当注意,为了附图的简单和清楚起见,针对相关联的伺服辅助控制单元105a和机械连杆机构105,仅示出了与直升机100的桨距控制有关的单个通道。然而,通常设置三个通道,即与纵向桨距控制有关的第一通道、与侧倾控制有关的第二通道以及与直升机1的总控制有关的第三通道。
操纵器104a被示例性地实现为周期距杆,其应被设置为仅用于控制旋翼桨叶102a、102b的周期桨距,而总桨距应由单独的操纵器控制。因此,在下文中,为了简单和清楚起见,操纵器104a也被称为“周期桨距操纵器”104a。
机械连杆机构105例如包括推/拉控制杆、摇臂、扭力轴和/或软轴(flexball)组件,并且是本领域技术人员公知的。因此,为了简单扼要,省略了对机械连杆机构105的详细描述。
交通工具控制系统110包括实操/无实操检测管理单元174。实操/无实操检测管理单元174可以检测交通工具操作者是否存在和/或交通工具操作者是否将要干预交通工具控制系统110的操作。检测交通工具操作者是否存在和/或交通工具操作者是否将要干预交通工具控制系统的操作有时也被称为实操检测、无实操检测或实操/无实操检测。
特别地,检测到存在交通工具操作者并且检测到交通工具操作者将要干预交通工具控制系统110的操作有时也称被为“交通工具操作者进行实操”。检测到不存在交通工具操作者或检测到存在交通工具操作者且检测到交通工具操作者将不干预交通工具控制系统110的操作有时也被称为“交通工具操作者无实操”。
如果需要,实操/无实操检测管理单元174可以耦合至传感器120或传感器144中的至少一个。
举例来说,传感器144可以与第一力生成装置140关联在一起并且链接到旋转输出单元160。
示例性地,传感器120可以与周期桨距操纵器104a关联在一起。传感器120、144可以检测交通工具操作者(例如,飞行员、驾驶员、指挥员、舵手、机长等)的是否存在和/或交通工具操作者是否将要干预交通工具控制系统110的操作。因此,传感器120、144有时也称为实操检测传感器、实操/无实操传感器或实操检测装置。
传感器120、144连接至交通工具控制系统110并且作为其一部分。如果需要,交通工具控制系统110可以具有用于检测交通工具操作者是否存在的冗余且不同的装置(例如,传感器120、144)以及实操/无实操检测管理单元174,以评估和整合由冗余且不同的装置提供的信息。
交通工具控制系统110可以包括用于在周期桨距操纵器104a上生成力的力生成装置130、140。更具体地,周期桨距操纵器104a优选经由机械连接器106连接至也作为交通工具控制系统110的一部分的力生成装置130、140的输出单元160。
力生成装置130、140可以由主自动飞行控制系统(AFCS)170和副自动飞行控制系统180控制。更具体地,主AFCS170和副AFCS180为力生成装置130、140提供指令,该指令包括由力生成装置130、140实现的触觉提示的相应配置。
在力生成装置130、140与直升机100以外的交通工具一起使用的情况下,主AFCS170和副AFCS180一般来说实现该交通工具的自动运动控制系统。
如果需要,自动运动控制系统170、180可以适于为直升机100的性能和飞行范围的极限提供预测值,以及提供对应的触觉提示。例如,自动运动控制系统170、180可以借助于合适的接口被电连接至一个或多个传感器120、144,并在直升机100的操作中基于从实操/无实操检测管理单元174接收到的(例如,由传感器120、144提供的)信息来控制力生成装置130、140。
力生成装置130可以经由安全单元161连接至旋转输出单元160。安全单元161可以被设置为用于限制力生成装置130的权限。特别地,可以借助于安全单元161防止诸如卡阻的内部失效或故障对交通工具造成灾难性的影响。安全单元161有时也被称为耦合装置或解耦装置。
图2A示出了交通工具控制系统200的实施方式,其具有操纵器204、实操/无实操传感器220、机械连杆机构205以及由AFCS270示例性地实施的自动运动控制系统270。举例来说,机械连杆机构205具有可选的摩擦和阻尼单元205b、伺服辅助控制单元205a、机械连接器206、第一串联机电致动器207、第二串联机电致动器208和机械连杆机构209。
举例来说,串联机电致动器207、208可以在操纵器204与伺服辅助控制单元205a之间在机械连杆机构205内串联地耦合,使得交通工具控制系统200可以独立于操纵器204的运动之外使伺服辅助控制单元205a移动,特别是将高速或高频运动叠加到伺服辅助控制单元205a的运动上以进行稳定。
实操/无实操传感器220、244可以连接至操纵器204。传感器220、244可以基于检测到存在交通工具操作者来生成传感器信号。交通工具操作者可以是使用交通工具控制系统来操作交通工具的任何自然人,包括飞行员、驾驶员、指挥员、舵手、机长等。
例如,在自主的(例如,无人)或远程控制的操作中,或者当交通工具操作者不与交通工具控制系统200主动交互时,实操/无实操传感器220、244可生成表示不存在交通工具操作者的传感器信号。再例如,在有人操作中,当交通工具操作者与交通工具控制系统200主动交互时,实操/无实操传感器220、244可生成表示存在交通工具操作者的传感器信号。
如果需要,交通工具控制系统200可以包括至少一个第一力生成装置240和至少一个第二力生成装置260,两者均机械地连接至操纵器204。
第一力生成装置240可以被设置为用于生成在操作中作用在操纵器204上的第一力。第二力生成装置260可以被设置为用于生成在操作中作用在操纵器204上的第二力。在操作中,这些力可以作用在操纵器204上以使其移动到中立位置。该中立位置可以限定确定交通工具(例如,图1的直升机100)的优选运动方向的配平点。
示例性地,第一力生成装置240可以被实现为用于生成第一力的常规的梯度配平致动器,这对于本领域技术人员是公知的。因此,为了简单和清楚起见,在下文中第一力生成装置240也被称为“梯度配平致动器”240。
第一力生成装置240可以包括输出单元241,其可以被实现为旋转输出单元。如果需要,机械连接器206可以将输出单元241耦合至操纵器204。示例性地,输出单元241可以连接至输出位置传感器242,该输出位置传感器适于在操作中监测旋转输出单元241的旋转位置。
输出单元241和输出位置传感器242可以通过安全单元243与第一力生成装置240的其余部件分开。安全单元243可以在使输出位置传感器242保持连接的同时将第一力生成装置240的至少一些部件与操纵器204断开。
如图所示,第一力生成装置240可以包括至少一个机械力生成单元244,其可以被实现为连接至安全单元243的弹簧单元244。由弹簧单元244提供的相应的弹簧力可以限定由第一力生成装置240所提供的力。如果需要,由弹簧单元244提供的相应的弹簧力可以借助于可逆齿轮单元245来调节。
如果需要,机械力生成单元244可以包括如上所述的用于实操/无实操检测的传感器。在一些实施方式中,用于实操/无实操检测的传感器可以与机械力生成单元244分开布置(例如,图3A、图3B、图5、图6、图7的传感器344被表示为与机械力生成单元244是分开的)。换言之,在这些实施方式中,机械力生成单元244可以不包括用于实操/无实操检测的传感器。
可逆齿轮单元245可连接至耦合单元247,并与其并联地连接至释放阻尼单元246。耦合单元247可经由不可逆齿轮单元248连接至电动马达249。
电动马达249可以被实施为有刷直流马达。电动马达249可在操作中将耦合单元247保持在耦合状态下。示例性地,安全单元243、弹簧单元244、可逆齿轮单元245、耦合单元247、不可逆齿轮单元248和有刷直流马达249可限定第一力生成装置240。
根据一个方面,耦合单元247可以被实施为配平释放单元,其适于将弹簧单元244耦合至操纵器204。配平释放单元247可以由交通工具操作者启动。换言之,交通工具操作者可以将弹簧单元244、并因此将第一力生成装置240与操纵器204解耦。如果需要,当弹簧单元244与操纵器204解耦时,第二力生成装置260可以保持机械地连接至操纵器204。
应该注意,由于不可逆齿轮248,即使在操作中失去电力供应或失去有刷直流马达249,也能维持由弹簧单元244提供力。只有在交通工具操作者启动耦合单元247将弹簧单元244与操纵器204解耦时,才为了方便交通工具操作者而解除力的供应。
如果需要,有刷直流马达249由自动运动控制系统270控制。如图所示,自动运动控制系统270可以包括冗余的第一控制和监测单元271a和第二控制和监测单元271b以及冗余的第一马达驱动器272a和第二马达驱动器272b。
如果需要,第一马达驱动器272a和第二马达驱动器272b可各自包括用于经由合适的经脉冲宽度调制的控制信号来控制有刷直流马达249的脉冲宽度调制器。
例如,当实操/无实操传感器220生成表示存在交通工具操作者的传感器信号时,第二力生成装置260可以生成在操作中作用在操纵器204上的触觉提示力。因此,第二力生成装置260有时也被称为触觉提示致动器260。触觉提示力可以受到限制,从而可被在交通工具(例如,图1的直升机100)的操作中操作操纵器204的交通工具操作者所克服。
再例如,第二力生成装置260可以设置为用于生成作用在操纵器204上的力来替代交通工具操作者并实现交通工具的自主的和/或远程控制的操作。因此,第二力生成装置260有时也被称为无人操作启用装置260。
根据一个方面,第二力生成装置260包括至少一个电动力生成单元263,其可以被实施为电动马达,特别是无刷直流马达单元263。该无刷直流马达单元263生成例如借助于可逆齿轮单元262通过第二力生成装置260被提供给操纵器204的力。
示例性地,无刷直流马达单元263通过控制和监测单元266经由马达驱动器264控制,该马达驱动器可包括用于减弱交通工具操作者辅助的振动和/或交通工具操作者引起的振动的振动阻尼单元。如果需要,马达驱动器264还可以包括用于经由合适的经脉冲宽度调制的控制信号来控制无刷直流马达单元263的脉冲宽度调制器。
举例来说,马达驱动器264可以响应于从控制和监测单元266接收到的指令来生成合适的经脉冲宽度调制的控制信号,控制和监测单元基于至少由与无刷直流马达单元263关联在一起的马达位置传感器267提供的传感器信息来生成这些指令。
马达位置传感器267可以提供用于扭矩控制的电流信息。如果需要,马达位置传感器267可以提供用于整流和扭矩控制的旋转位置信息。在一些实施方式中,马达位置传感器267提供与无刷直流马达单元263、尤其是对应的马达绕组的温度有关的信息。
在一些实施方式中,安全单元261可以将第二力生成装置260与操纵器204断开。
示例性地,安全单元261、可逆齿轮单元262、无刷直流马达单元263、马达位置传感器267、控制和监测单元266以及马达驱动器264限定第二力生成装置260。
如果需要,控制和监测单元266可以经由合适的总线连接至自动运动控制系统270的控制和监测单元271a、271b,并由后者进行监测和控制。自动运动控制系统270可以适于基于传感器信息来驱动第二力生成装置260。
如图所示,第一力生成装置240和第二力生成装置260可以并联布置。换言之,第一力生成装置240和第二力生成装置260都可以直接作用在操纵器204上。
示例性地,第二力生成装置260可以安装在交通工具操作者水平上方(例如,在图1的直升机100的驾驶舱地板上方)。如果需要,第二力生成装置可以安装在其他位置(例如,在图1的直升机100的驾驶舱地板下方)。
图2B是示例性的交通工具控制系统250的示意图,其具有安装在交通工具操作者水平下方(例如,航空器的驾驶舱地板下方)的第二力生成装置265。第二力生成装置265可包括安全单元261、可逆齿轮单元262、无刷直流马达单元263、马达驱动器264、控制和监测单元266以及马达位置传感器267。
第二力生成装置265可以通过与图2A的第二力生成装置260相同的方式操作。因此,第二力生成装置265有时也被称为无人操作启用装置265。
然而,如图2B所示,并联的第一力生成装置240和第二力生成装置265经由安全单元243、261连接至第一力生成装置240的旋转输出单元241,这些安全单元被设置为用于限制第一力生成装置240和第二力生成装置260的权限。特别地,可以借助于安全单元243、261防止诸如卡阻的内部失效或故障对交通工具造成灾难性的影响。
安全单元243、261可以分别在使输出位置传感器242保持连接至输出单元241的同时将第一力生成装置240和第二力生成装置260与操纵器204断开。
图3A是根据一些实施方式的具有双联高性能配平致动器(IPTA)的用于控制交通工具的示例性的交通工具控制系统300的示意图。如图所示,交通工具控制系统300可以包括伺服辅助控制单元205a、耦合至伺服辅助控制单元205a的机械连杆机构205、适于经由机械连杆机构205控制伺服辅助控制单元205a的操纵器204、实操/无实操传感器220、244、第一力生成装置340(有时也被称为梯度配平致动器340)、第二力生成装置360(有时也被称为IPTA360)以及解耦装置361。
第一力生成装置340可以机械地连接至操纵器204,并且被设置为用于生成在操作中作用在操纵器204上的第一力。第二力生成装置360可以与第一力生成装置340并联地机械地连接至操纵器204,并被设置为用于生成在操作中作用在操纵器204上的第二力。
示例性地,交通工具控制系统300可以包括实操/无实操检测管理单元374。实操/无实操检测管理单元374可以检测交通工具操作者是否存在和/或交通工具操作者是否将要干预交通工具控制系统300的操作。如果需要,实操/无实操检测管理单元374可以耦合至传感器220或344中的至少一个。
在一些实施方式中,可以将实操/无实操检测管理单元374与传感器220、344解耦。例如,实操/无实操检测管理单元374可以包括电子硬件,其例如包括逻辑电路。如果需要,实操/无实操检测管理单元374可以是基于软件的,并且可以被实现或嵌入在第二力生成装置360和/或自动运动控制系统370中。
实操/无实操传感器220、344可以连接至操纵器204,并且基于检测到存在交通工具操作者而生成传感器信号。解耦装置361可以耦合在第二力生成装置360和操纵器204之间,其中解耦装置361基于传感器信号将第二力生成装置360与操纵器204机械地解耦。
在一些实施方式中,解耦装置361可以是第二力生成装置360的一部分。如果需要,解耦装置361可以与第二力生成装置360分开布置。
示例性地,解耦装置361可包括离合器361,其在来自实操/无实操传感器220、344的传感器信号表示不存在交通工具操作者时将第二力生成装置360与操纵器204解耦。
举例来说,当来自实操/无实操传感器220、344的传感器信号表示存在交通工具操作者时或者当第一力生成装置340有缺陷时,离合器361将第二力生成装置360耦合至操纵器204。
如果需要,交通工具控制系统300还可包括机械连接器206、自动运动控制系统370以及选择器电路381、382、383和384。
第一力生成装置340可以包括输出单元241,其可以被实现为旋转输出单元。如果需要,机械连接器206可以将输出单元241耦合至操纵器204。示例性地,输出单元241可以连接至输出位置传感器342a、342b,该输出位置传感器适于在操作中监测旋转输出单元241的旋转位置。
如图所示,第一力生成装置340可以包括至少一个机械力生成单元244,其可以被实现为连接至安全单元243的弹簧单元244。如果需要,可以将实操/无实操传感器344与至少一个机械力生成单元244关联在一起。例如,实操/无实操传感器344可以检测交通工具操作者是否存在。如果需要,实操/无实操传感器344可以检测当前的交通工具操作者是否将要干预交通工具的控制。
第二力生成装置360可以实现双联高性能配平致动器(IPTA)。例如,第二力生成装置360可包括安全单元361、可逆齿轮单元362、无刷直流马达单元365a、365b、马达电流传感器366a、366b、马达驱动器367a、367b、控制和监测单元368a、368b、马达位置传感器363a、363b以及可适于在操作中监测旋转输出单元241的旋转位置的输出位置传感器364。
无刷直流马达单元365a、365b可生成通过第二力生成装置360例如借助于可逆齿轮单元362提供给操纵器204的力。示例性地,无刷直流马达单元365a、365b通过相应的控制和监测单元368a、368b经由相应的马达驱动器367a、367b和马达电流传感器366a、366b来控制。
举例来说,马达驱动器367a、367b可以响应于从相应的控制和监测单元368a、368b接收到的指令而生成合适的经脉冲宽度调制的控制信号,这些控制和监测单元基于至少由与相应的无刷直流马达单元365a、365b关联在一起的相应的马达位置传感器363a、363b所提供的传感器信息来生成这些指令。
马达位置传感器363a、363b可以提供用于扭矩控制的电流信息。如果需要,马达位置传感器363a、363b可以提供用于整流和扭矩控制的旋转位置信息。在一些实施方式中,马达位置传感器363a、363b可以提供与相应的无刷直流马达单元365a、365b、尤其是对应的马达绕组的温度有关的信息。
如图所示,第一力生成装置340和第二力生成装置360可以并联布置。换言之,第一力生成装置340和第二力生成装置360都可以作用在旋转输出单元241上。
如果需要,交通工具控制系统300可以包括自动运动控制系统370。如图所示,自动运动控制系统370可以包括主运动控制系统373和副运动控制系统375。例如,自动运动控制系统370可以由主AFCS373和副AFCS375实现。
示例性地,主运动控制系统373和副运动控制系统375可以彼此机械地和/或电气地分隔开并且是不相同的。主自动运动控制系统373可以包括冗余的第一控制和监测单元371a和第二控制和监测单元371b、冗余的第一马达驱动器372a和第二马达驱动器372b以及实操/无实操检测管理单元374。
如果需要,冗余的第一马达驱动器372a和第二马达驱动器372b可各自包括用于经由合适的经脉冲宽度调制的控制信号来控制有刷直流马达249的脉冲宽度调制器。冗余的第一控制和监测单元371a和/或第二控制和监测单元371b可以从实操/无实操检测管理单元374接收信号。
副自动运动控制系统375可以包括副控制和监测单元376和电子备用仪器377。如果需要,副控制和监测单元376可以从实操/无实操检测管理单元374接收信号。
实操/无实操检测管理单元374可以从实操/无实操传感器220和344接收传感器信号。实操/无实操传感器220可以包括压感手柄或踏板或静电手柄或踏板。实操/无实操传感器344可以通过检测第一力生成装置340内的交通工具操作者的力来检测交通工具操作者的干预。
如果需要,实操/无实操检测管理单元374可以启用或停用安全单元361,从而将第二力生成装置360与旋转输出单元241耦合或解耦。
如果需要,实操/无实操检测管理单元374可以直接或间接地启用或停用第二力生成装置360。例如,实操/无实操检测管理单元374可以经由马达驱动器276启用或停用第二力生成装置360。再例如,实操/无实操检测管理单元374可以中断第二力生成装置360的电力供应。又例如,控制和监测单元368可以被重新配置为使得由第二力生成装置360生成的力在旋转输出单元241处被最小化。
示例性地,实操/无实操检测管理单元374与实操/无实操传感器220和344一起可以实现对伺服辅助控制单元205a或交通工具控制系统300的其他部件的卡阻和/或退化的检测。例如,在自主的或远程控制的操作模式下(即,在无人操作模式下),伺服辅助控制单元205a的卡阻和/或退化(例如,归因于分配阀卡阻或丧失液压动力供应)可以导致实操/无实操传感器220和/或344触发表示存在交通工具操作者的传感器信号的生成。再例如,在有人操作模式下,伺服辅助控制单元205a的卡阻和/或退化可以导致实操/无实操传感器220触发表示交通工具操作者无实操的传感器信号的生成(即,传感器信号表示检测到不存在交通工具操作者或检测到存在交通工具操作者且检测到交通工具操作者将不干预交通工具控制系统300的操作),而实操/无实操传感器344可生成表示交通工具操作者进行实操的传感器信号(即,传感器信号表示检测到存在交通工具操作者并且检测到交通工具操作者将要干预交通工具控制系统300的操作)。
如果需要,在两个实操/无实操传感器220、344都生成表示不存在交通工具操作者的相应的传感器信号(即,表示交通工具操作者无实操的传感器信号)时,不论交通工具控制系统300是在自主的或远程控制的操作模式下还是在有人操作模式下操作,交通工具控制系统300都可以避免生成触觉提示。
例如,交通工具控制系统300可以将第二力生成装置360与旋转输出单元241解耦(例如,使用解耦装置361)以避免生成触觉提示。再例如,交通工具控制系统300可以停用第二力生成装置360以避免生成触觉提示。
选择器电路381、382、383、384(有时也被称为开关)可以耦合在自动运动控制系统370与第一力生成装置340和第二力生成装置360之间。例如,选择器电路381可以从第一控制和监测单元371a接收第一信号并从第二控制和监测单元371b接收第二信号。选择器电路381可以在第一信号和第二信号之间进行选择,并将所选择的信号转发给第二力生成装置360的控制和监测单元368b以及第一串联机电致动器207。
选择器电路382可以从第一马达驱动器372a接收第一信号并从第二马达驱动器372b接收第二信号。选择器电路382可以在第一信号和第二信号之间进行选择,并将所选择的信号转发给第一力生成装置340的有刷直流马达单元249。
选择器电路383可以从主运动控制系统373的第一控制和监测单元371a接收第一信号并从第二控制和监测单元371b接收第二信号。选择器电路383可以在第一信号和第二信号之间进行选择,并将所选择的信号转发给选择器电路384。
选择器电路384可以从选择器电路383接收第一信号并从副运动控制系统375的副控制和监测单元376接收第二信号。选择器电路384可以在第一信号和第二信号之间进行选择,并将所选择的信号转发给第二力生成装置360的控制和监测单元368a以及第二串联机电致动器208。换言之,选择器电路384将主运动控制系统373和副运动控制系统375中的一个与第二力生成装置360连接。
因此,根据选择器电路381、382、383、384所做的选择,主运动控制系统373可以控制机械连杆机构205以及第一力生成装置340和第二力生成装置360,而副运动控制系统375可以控制机械连杆机构205和第二力生成装置360。换言之,主运动控制系统373可以适于驱动第一力生成装置和第二力生成装置,而副运动控制系统375与主运动控制系统373分隔且独立,并适于驱动第二力生成装置360。
图3B是根据一些实施方式的具有单联高性能配平致动器(IPTA)365的示例性的交通工具控制系统350的示意图。
如图所示,交通工具控制系统350可以包括伺服辅助控制单元205a、耦合至伺服辅助控制单元205a的机械连杆机构205、适于经由机械连杆机构205控制伺服辅助控制单元205a的操纵器204、实操/无实操传感器220、第一力生成装置340(有时也被称为梯度配平致动器340)、第二力生成装置365(有时也被称为IPTA365)以及解耦装置361(有时也被称为安全单元361)。
第二力生成装置365可以实现单联高性能配平致动器(IPTA)。例如,第二力生成装置365可以包括安全单元361、可逆齿轮单元362、输出位置传感器340、无刷直流马达单元365a、马达电流传感器366a、马达驱动器367a、控制和监测单元368a以及马达位置传感器363a。如果需要,安全单元361可以布置在第二力生成装置365的外部。
第二力生成装置365可以通过与图3A的第二力生成装置360相同的方式操作。然而,与图3A的双联IPTA360相比,单联IPTA365缺少冗余的无刷直流马达单元365b、冗余的马达电流传感器366b、冗余的马达驱动器367b、冗余的控制和监测单元368b以及冗余的马达位置传感器363b。因此的结果是,与图3A的双联IPTA360相比,单联IPTA365可降低成本、重量和尺寸。
图4是根据一些实施方式的具有双联高性能配平致动器(IPTA)460和至少一个高性能串联致动器(IPSA)407、408的示例性的交通工具控制系统400的示意图。
如图所示,交通工具控制系统400可包括伺服辅助控制单元205a、耦合至伺服辅助控制单元205a的机械连杆机构205、适于经由机械连杆机构205控制伺服辅助控制单元205a的操纵器204、实操/无实操传感器220、摩擦力生成装置440、第二力生成装置460(有时也被称为IPTA460)以及解耦装置361。
第二力生成装置460可以实现双联高性能配平致动器(IPTA)。例如,第二力生成装置460可包括解耦装置361、可逆齿轮单元362、输出位置传感器364、无刷直流马达单元365a、365b、马达驱动器367a、367b、控制和监测单元368a、368b以及马达位置传感器363a、363b。如果需要,解耦装置361可以布置在第二力生成装置460的外部。
第二力生成装置460可以通过与图3A的第二力生成装置360相同的方式操作。实际上,为了简化图示,从第二力生成装置460中省略了第二力生成装置360的马达电流传感器366a、366b。
如果需要,交通工具控制系统400还可包括机械连接器206、自动运动控制系统470以及选择器电路381、383、384和484。
如图所示,自动运动控制系统470可以包括主运动控制系统473和副运动控制系统375。例如,自动运动控制系统470可以包括分别用作为主运动控制系统473和副运动控制系统375的主AFCS473和副AFCS375。
主运动控制系统473可以包括第一控制和监测单元371a和第二控制和监测单元371b。在一些实施方式中,主运动控制系统473可以包括实操/无实操检测管理单元(例如,图3A和图3B的实操/无实操检测管理单元374)。
在机械连杆机构205中,至少一个根据图1、图2A、图2B、图3A或图3B的串联机电致动器207、208被至少一个高性能串联致动器(IPSA)407、408替代。根据图1、图2A、图2B、图3A或图3B的串联机电致动器207、208受到有限的行程、速度和力性能的影响。相比之下,高性能串联致动器(IPSA)407、408能够具有增加的行程、速度和/或力。例如,高性能串联致动器(IPSA)能够比串联机电致动器多出至少20%的行程、至少10%的速度以及至少30%的力。
选择器电路381、383、384、484(有时也被称为开关)可以耦合在自动运动控制系统470和高性能串联致动器407、408之间以及自动运动控制系统470和第二力生成装置460之间。例如,选择器电路381可以从主运动控制系统473的第一控制和监测单元371a接收第一信号并且从第二控制和监测单元371b接收第二信号。选择器电路381可以在第一信号和第二信号之间进行选择,并将所选择的信号转发给选择器电路484。
选择器电路484可以从选择器电路381接收第一信号并且从副运动控制系统375的副控制和监测单元376接收第二信号。选择器电路484可以在第一信号和第二信号之间进行选择,并将所选择的信号转发给第二力生成装置460的控制和监测单元368b以及第一高性能串联致动器407。换言之,选择器电路484将主运动控制系统473和副运动控制系统375中的一个与第二力生成装置460和第一高性能串联致动器407连接。
图5、图6和图7是图3B的示例性的交通工具控制系统350的示意图,示出了根据一些实施方式的不同失效情况的检测和重新配置。
例如,图5示出了伺服辅助控制单元205a的退化510,其可以由实操/无实操检测管理单元374以及实操/无实操传感器220和344一起检测。示例性地,伺服辅助控制单元205a的退化510可能是由液压分配阀的卡阻或伺服辅助控制单元205a的液压动力供应的丧失/退化引起的。
例如,伺服辅助控制单元205a的退化510可触发实操/无实操传感器344生成表示存在交通工具操作者的传感器信号,而实操/无实操传感器220生成表示不存在交通工具操作者的传感器信号。在无人操作中,基于实操/无实操传感器344,将不需要额外的的传感器220来检测失效。
与传统的配平致动器相比,使用高性能配平致动器作为第二力生成装置365可以提供更高的扭矩和更高的速度,从而克服与伺服辅助控制单元205a的退化510有关的问题。
示例性地,由于其更高的扭矩性能,即使在退化510之后,高性能配平致动器也可以在有人操作或无人操作中可靠地锚固和定位机械连杆机构205,从而驱动伺服辅助控制单元205a对直升机进行配平。
在一些情况下,伺服辅助控制单元205a的退化510可能导致损失第一串联机电致动器207和/或第二串联机电致动器208(例如,由于串联机电致动器207、208的受限的力性能而引起),这可能会导致交通工具失去稳定。在这些情况下,使用高性能配平致动器作为第二力生成装置365提供了比传统的配平致动器更高的扭矩,并因此可以可靠地锚固并快速移动机械连杆机构205来驱动伺服辅助控制单元205a,从而在飞行员无实操时稳定处于无人操作或有人操作的直升机。
在一些情况下,第一串联机电致动器207和/或第二串联机电致动器208的退化或损失520可能导致交通工具失去稳定。在这些情况下,使用高性能配平致动器作为第二力生成装置365提供了比传统的配平致动器更高的速度,并因此可以可靠地锚固并快速移动机械连杆机构205来驱动伺服辅助控制单元205a,从而在飞行员无实操时稳定处于无人操作或有人操作的直升机。
再例如,图6是图3B的示例性的交通工具控制系统350的示意图,其示出了第一力生成装置340(例如,配平致动器)的卡阻610。例如,可逆齿轮单元245可能被卡阻住,这可以由输出位置传感器342a、342b、364检测到。
例如,在命令第一力生成装置340改变输出位置的同时,当实操/无实操检测管理单元374检测不到对交通工具控制系统的操作进行干预的交通工具操作者的存在时所有输出位置传感器342a、342b和364都可检测到输出位置没有改变,这表示第一力生成装置340的卡阻610。
使用高性能配平致动器作为第二力生成装置365可以减轻与第一力生成装置340的卡阻610有关的问题。如果需要,可以关闭耦合单元361来提供由第二力生成装置365生成的额外的扭矩,从而使安全单元243破裂并释放第一力生成装置340的卡阻610。
在一些实施方式中,第一串联机电致动器207和/或第二串联机电致动器208可以由高性能串联致动器替代。
又例如,图7是图3B的示例性的交通工具控制系统350的示意图,其示出了主运动控制系统373(例如,主AFCS)的缺陷710。
如果检测到第一控制和监测单元371a的失效,则交通工具控制系统350可以从使用第一控制和监测单元371a切换为使用主运动控制系统373的第二控制和监测单元371b。
如果从第一控制和监测单元371a到第二控制和监测单元371b的切换不能减轻主运动控制系统373的缺陷710的问题,则交通工具控制系统350可以从使用主运动控制系统373切换到使用副运动控制系统375。由此,副运动控制系统375可以经由选择器电路384通过第二力生成装置365来控制交通工具的配平,并经由选择器电路384通过第二力生成装置365和/或第二串联机电致动器208来稳定交通工具。
在无人操作中,副运动控制系统375可以经由选择器电路384通过第二力生成装置365来控制交通工具的配平,并且可以经由选择器电路384通过第二力生成装置365和/或第二串联机电致动器208来稳定交通工具。
在有人操作中,优选的是经由选择器电路384通过第二串联机电致动器208来稳定交通工具,同时交通工具操作者可以手动地驱动交通工具或者经由选择器电路384通过第二力生成装置365来配平交通工具。
图8A是示出根据一些实施方式的交通工具控制系统可以针对控制交通工具而执行的示例性操作的流程图800。
交通工具控制系统(例如,图3A的交通工具控制系统300或图3B的交通工具控制系统350)可以控制交通工具并且包括伺服辅助控制单元(例如,图3A、图3B的伺服辅助控制单元205a)、耦合至伺服辅助控制单元的机械连杆机构(例如,图3A、图3B的机械连杆机构205)、适于经由机械连杆机构控制伺服辅助控制单元的操纵器(例如,图3A、图3B的操纵器204)、机械地连接至操纵器的第一力生成装置(例如,图3A、图3B的第一力生成装置340)、与第一力生成装置并联地机械地连接至操纵器的第二力生成装置(例如,图3A的力生成装置360或图3B的力生成装置365)、连接至操纵器的实操/无实操检测管理单元(例如,图3A、图3B的实操/无实操检测管理单元374)以及耦合在第二力生成装置和操纵器之间的解耦装置(例如,图3A、图3B的解耦装置361)。
在操作810期间,交通工具控制系统可以将实操/无实操检测管理单元配置为在有人操作模式或无人操作模式下操作。例如,图3B的交通工具控制系统350可以将实操/无实操检测管理单元374配置为在有人操作模式或无人操作模式下操作。如果需要,交通工具控制系统可以将相关信息存储在自动运动控制系统370中。
如果需要,交通工具控制系统可以包括独立于实操/无实操检测管理单元的、用于在有人或无人模式下操作的不同设置,并且交通工具控制系统可以相应地配置该设置。示例性地,交通工具控制系统可以基于该设置是表示交通工具有人操作还是无人操作来操作伺服辅助控制单元、机械连杆机构、操纵器、第一力生成装置、第二力生成装置、实操/无实操检测管理单元和解耦装置。
响应于870将实操/无实操检测管理单元配置为在有人操作模式下操作,交通工具控制系统可以在有人操作模式下操作实操/无实操检测管理单元。例如,在将表示在有人操作模式下操作实操/无实操检测管理单元374的相关信息存储在自动运动控制系统370中后,交通工具控制系统350可以在有人操作模式下操作实操/无实操检测管理单元374。
响应于880将实操/无实操检测管理单元配置为在无人操作模式下操作,交通工具控制系统可以在无人操作模式下操作实操/无实操检测管理单元。例如,在将表示在无人操作模式下操作实操/无实操检测管理单元374的相关信息存储在自动运动控制系统370中后,交通工具控制系统350可以在无人操作模式下操作实操/无实操检测管理单元374。
图8B是示出了根据一些实施方式的交通工具控制系统(例如,图3B的交通工具控制系统350)在将实操/无实操检测管理单元配置为在有人操作模式下操作时可以执行的示例性操作的流程图。
在操作820期间,交通工具控制系统可以使用实操/无实操检测管理单元来生成表示交通工具操作者的手动干预的控制信号。例如,图3B的交通工具控制系统350可以使用实操/无实操检测管理单元374来生成表示交通工具操作者的手动干预的控制信号。示例性地,实操/无实操检测管理单元374可以使用实操/无实操传感器220和/或实操/无实操传感器344来生成表示交通工具操作者的手动干预的传感器信号。
例如,实操/无实操传感器220可以包括检测交通工具操作者在操纵器204上的手或脚的压感手柄或踏板或静电手柄或踏板。实操/无实操传感器344可以通过检测第一力生成装置340内的交通工具操作者的力来检测交通工具操作者的干预。
在操作830期间,交通工具控制系统可以基于来自实操/无实操检测管理单元的控制信号来启用或停用830第二力生成装置。例如,图3B的交通工具控制系统350可以基于来自实操/无实操检测管理单元374的控制信号来启用或停用第二力生成装置365。
例如,交通工具控制系统350可以基于控制信号来操作耦合在第二力生成装置365和操纵器204之间的解耦装置361。
例如,响应于表示交通工具操作者的手动干预的控制信号,交通工具控制系统350可以操作解耦装置361将第二力生成装置365与操纵器204耦合,使得第二力生成装置365可以生成触觉提示,该触觉提示从第二力生成装置365被传递至操纵器204。触觉提示可以是交通工具操作者利用操纵器204执行的移动的反作用力的形式。
再例如,响应于表示交通工具操作者没有手动干预的控制信号,交通工具控制系统350可以指示马达驱动器367a停用第二力生成装置360、365以防止第二力生成装置365产生触觉提示。
又例如,响应于表示交通工具操作者没有手动干预的控制信号,交通工具控制系统350可以操作解耦装置361将第二力生成装置365与操纵器204解耦,从而防止触觉提示从第二力生成装置365传递至操纵器204。
图8C是示出了根据一些实施方式的交通工具控制系统(例如,图3B的交通工具控制系统350)在将实操/无实操检测管理单元配置为在无人操作模式下操作时可以执行的示例性操作的流程图。
在操作840期间,交通工具控制系统可以使用自动运动控制系统来控制交通工具的位置。例如,图3B的交通工具控制系统350可以使用自动运动控制系统370来控制交通工具的位置。
在操作850期间,交通工具控制系统可以使用实操/无实操检测管理单元来生成表示交通工具控制系统的故障的控制信号。例如,图3B的交通工具控制系统350可以生成表示交通工具控制系统350的故障的控制信号。
在操作860期间,交通工具控制系统可以基于来自实操/无实操检测管理单元的控制信号来操作耦合在第二力生成装置与操纵器之间的解耦装置。例如,图3B的交通工具控制系统350可以基于来自实操/无实操检测管理单元374的控制信号来操作耦合在第二力生成装置365和操纵器204之间的解耦装置361。控制信号可以基于来自实操/无实操传感器220的传感器信号和/或基于来自实操/无实操传感器344的传感器信号。
图8D是示出了根据一些实施方式的使用实操/无实操检测管理单元(例如,图3B的实操/无实操检测管理单元374)来生成表示交通工具控制系统(例如,交通工具控制系统350)的故障的控制信号以及基于该控制信号操作耦合在第二力生成装置(例如,第二力生成装置365)和操纵器(例如,操纵器204)之间的解耦装置(例如,解耦装置361)的示例性操作的流程图。
在操作853期间,交通工具控制系统可以使用第一力生成装置中的传感器来检测由伺服辅助控制单元的退化引起的控制力的增大,并且在操作863期间可以通过将第二力生成装置与操纵器耦合而使用第二力生成装置执行配平和稳定。
例如,图3B的交通工具控制系统350可使用第一力生成装置340中的实操/无实操传感器344来检测由伺服辅助控制单元205a的退化510引起的控制力的增大,并通过将第二力生成装置365与操纵器204耦合而使用第二力生成装置365执行配平和稳定。
图8E是示出了根据一些实施方式的用于检测和校正交通工具控制系统中的问题的示例性操作的流程图。
示例性地,在常规操作期间,交通工具控制系统(例如,图3B的交通工具控制系统350)可以使用第一力生成装置340来控制交通工具的配平。此外,当将实操/无实操检测管理单元374配置为在有人操作模式下操作时,交通工具控制系统350可以将第二力生成装置365耦合至操纵器204以向交通工具操作者提供触觉提示,并且将第二力生成装置365与操纵器204解耦以防止在将实操/无实操检测管理单元374配置为在无人操作模式下操作时在操纵器204处的不必要的阻力矩。
如果需要,交通工具控制系统350可以包括串联机电致动器207、208,并且使用串联机电致动器207、208来稳定交通工具。
在操作855至857期间,交通工具控制系统可以检测第一力生成装置的卡阻,通过将第二力生成装置与操纵器耦合而使用第二力生成装置执行配平,并且使用第一力生成装置中的额外的解耦装置将第一力生成装置与操纵器解耦。
例如,图3B的交通工具控制系统350可以使用第一力生成装置340中的实操/无实操传感器344来检测第一力生成装置340的卡阻,通过将第二力生成装置365与操纵器204耦合而使用第二力生成装置365执行配平,并使用第一力生成装置340中的解耦装置243将第一力生成装置340与操纵器204解耦。
在一些实施方式中,图3B的交通工具控制系统350可以检测第二力生成装置365的卡阻、故障或损失。结果,交通工具控制系统350可以使用第一力生成装置340执行配平,将第二力生成装置365与操纵器解耦,并使用串联机电致动器207、208稳定交通工具。
图8F是示出了根据一些实施方式的用于检测和校正包括机械连杆机构中的串联机电致动器的交通工具控制系统中的问题的示例性操作的流程图。
在操作858和859期间,交通工具控制系统可以检测串联机电致动器的总损失,并且通过将第二力生成装置与操纵器耦合而使用第二力生成装置执行配平和稳定。
例如,图3B的交通工具控制系统350可以检测串联机电致动器207、208的总损失,并且通过将第二力生成装置365与操纵器204耦合而使用第二力生成装置365执行配平和稳定。
图8G是示出了用于检测和校正包括机械连杆机构中的串联机电致动器以及自动运动控制系统中的主和副运动控制系统的交通工具控制系统中的问题的示例性操作的流程图。
在操作861和862期间,交通工具控制系统可以检测主运动控制系统的缺陷,并使用耦合在自动运动控制系统和第二力生成装置之间的选择器电路从主运动控制系统切换到副运动控制系统,从而作为针对第二力生成装置的输入和针对串联机电致动器中的串联机电致动器的输入。
例如,图3B的交通工具控制系统350可以检测主运动控制系统373的缺陷,并使用耦合在自动运动控制系统370和第二力生成装置365之间的选择器电路384从主运动控制系统373切换到副运动控制系统375,从而作为针对第二力生成装置365的输入和针对串联机电致动器207、208中的串联机电致动器208的输入。
在一些实施方式中,交通工具控制系统350可以在涉及主运动控制系统373的部分损失或退化的主运动控制系统373的缺陷和涉及主运动控制系统373的总损失的缺陷之间进行分辨。
在主运动控制系统部分损失或退化的情况下,交通工具控制系统350可以使用耦合在自动运动控制系统370和第二力生成装置365之间的选择器电路383从主运动控制系统的第一运动控制系统切换到第二运动控制系统,从而作为针对串联机电致动器207、208中的串联机电致动器208的输入。
仅在主运动控制系统373的总损失的情况下,交通工具控制系统350才可以使用耦合在自动运动控制系统370和第二力生成装置365之间的选择器电路384从主运动控制系统373切换到副运动控制系统375,从而作为针对第二力生成装置365的输入和针对串联机电致动器207、208中的串联机电致动器208的输入。
应当注意,上述实施方式的变型在本领域技术人员的常识内,因此也被认为是本发明的一部分。
例如,使用图3B的交通工具控制系统350示例性地描述了操作810、820、830、840、850、853、855、856、857、858、859、860、861、862、870、880。但是,图3A的交通工具控制系统300或图4的交通工具控制系统400可以同样用于执行操作810、820、830、840、850、853、855、856、857、858、859、860、861、862、870、880。
此外,图2A至图7的机械连杆机构205被表示为具有第一串联机电致动器207和第二串联机电致动器208、机械连杆机构209以及摩擦和阻尼单元205b。然而,如果需要,机械连杆机构205可具有单个或两个以上的串联机电致动器和/或不具有摩擦和阻尼单元205b。
此外,图3A和图3B的第一力生成装置340被表示为仅由主运动控制系统373的第一控制和监测单元371a或第二控制和监测单元371b控制。然而,交通工具控制系统300、350可包括额外的的选择器电路,使得第一力生成装置340可以由主运动控制系统373的第一控制和监测单元371a或第二控制和监测单元371b以及副运动控制系统375的控制和监测单元367进行控制。
附图标记列表
100 旋翼飞机
101a 机身
101b 尾梁
101c 轮式起落架
102 主旋翼
102a,102b 旋翼桨叶
102c 旋翼头部
102d 旋翼主轴
103 尾旋翼
104 桨距控制单元
104a 周期桨距操纵器
105 机械连杆机构
105a 伺服辅助控制单元
106 机械连接器
110 交通工具控制系统
120 传感器
130、140 力生成装置
144 实操/无实操传感器
160 旋转输出单元
161 安全装置、耦合装置、解耦装置
170、180 自动运动控制系统
174 实操/无实操检测管理单元
200 交通工具控制系统
204 操纵器
205 机械连杆机构
205a 伺服辅助控制单元
205b 摩擦和阻尼单元
206 机械连接器
207 第一串联机电致动器
208 第二串联机电致动器
209 机械连杆机构
220 实操/无实操传感器
240 梯度配平致动器、力生成装置
241 旋转输出单元
242 输出位置传感器
243 安全装置、耦合装置、解耦装置
244 弹簧单元、实操/无实操传感器
245 可逆齿轮单元
246 释放阻尼单元
247 配平释放单元、耦合单元
248 不可逆齿轮单元
249 有刷直流马达单元
250 交通工具控制系统
260 无人操作启用装置、力生成装置、触觉提示致动器
261 安全单元、耦合装置、解耦装置
262 可逆齿轮单元
263 无刷直流马达单元
264 马达驱动器
265 无人操作启用装置、力生成装置、触觉提示致动器
266 控制和监测单元
267 马达位置传感器
270 自动运动控制系统
271a,271b 控制和监测单元
272a,272b 马达驱动器
300 交通工具控制系统
340 梯度配平致动器、力生成装置
342a,342b 输出位置传感器
344 实操/无实操传感器
350 交通工具控制系统
360 无人操作启用装置、力生成装置、触觉提示致动器
361 安全单元、耦合装置、解耦装置
362 可逆齿轮单元
363a,363b 马达位置传感器
364 输出位置传感器
365 无人操作启用装置
365a,365b 无刷直流马达单元
366a,366b 马达电流传感器
367a,367b 马达驱动器
368a,368b 控制和监测单元
370 自动运动控制系统
371a,371b 控制和监测单元
372a,372b 马达驱动器
373 主运动控制系统
374 实操/无实操检测管理单元
375 副运动控制系统
376 控制和监测单元
377 电子备用仪器
381、382、383、384 选择器电路
400 交通工具控制系统
407、408 无人操作启用装置、高性能串联致动器(IPSA)
440 摩擦力生成装置
460 无人操作启用装置、高性能配平致动器(IPTA)、力生成装置
470 自动运动控制系统
473 主运动控制系统
484 选择器电路
510 伺服辅助控制单元的退化
520 第一和/或第二串联机电致动器的退化或损失
610 第一力生成装置的卡阻
710 自动运动控制系统的缺陷
800 方法
810、820、830、840、850、853、855、856、857、858、859、860、861、862、863、870、880操作
- 用于交通工具自主远程控制或手动操作的交通工具控制系统
- 用于远程控制自主交通工具的加密安全机制