用于从运载火箭发射多颗卫星的系统和方法
文献发布时间:2023-06-19 10:51:07
技术领域
本实施例总体上涉及一种用于从运载火箭发射多颗卫星的系统,并且更具体地涉及一种没有任何羽流相互作用并且满足长期无碰撞要求的确保多颗卫星分离的系统和方法。
背景技术
常规的卫星部署系统使用多级运载火箭在它们单独分离并飞行到其最终运行轨道之前到达插入轨道。运载火箭的动力和推进力有限,因此所有卫星都应部署在相对较小的时间窗口内。在有大量卫星作为有效载荷的情况下,很难在有限的时间窗口内相对快速地连续部署它们,这是因为卫星之间的距离很近,而且存在固有的潜在碰撞风险。
现有技术(www.nasaspaceflight.com)公开了在卫星从火箭上脱离之后使用减速火箭的点火发动(retro firing)来将上级移开。另一现有技术(US 9463882 Bi)公开了一种方法,其中,具有推进单元的整个分配器模块与末级分离,而卫星随后与分配器模块分离。但是,当需要以安全的方式在较短的发射时间窗口内一次尝试部署大量卫星时,这些方法将无济于事。
US 9463882 131公开了一种用于组装和部署卫星的系统和方法。在本发明中,多个分配器模块与它们自己的推进单元一起使用,以从该模块中分离出一组卫星。这些模块在指定的时间与火箭的末级分离,并且可以被操控以相互避开以免碰撞。解决了本发明的局限性,并且本发明中的新颖策略是(1)所有卫星都以适当的定向附接并直接从末级分离;(2)提供侧倾操控,控制分离的时间并在不同方向上以不同的角度同时分离卫星;(3)视频成像系统的定位证实了确切的分离。
参考文献:digitalcommons.usu.edu,2002年AIAA/USU小卫星会议论文集,DonaldE.Keenan,“ADeployment Strategy for Multiple Secondary Payloads on the MLV05Mission(MLV05任务的多个次要有效载荷的部署策略)”公开了多卫星分离,其中主要选项是在不同的时间间隔内以不同的相对速度(Δv)的各种卫星的分离,其中总分离时间窗口定义为45分钟。使用本发明解决的该方法的局限性是:(1)通过使用相同的分离机构,使卫星具有几乎相同的相对速度;(2)可以将任务的总时间限制在800s以下。
参考文献:www.nasaspaceflight.com公开了当级仍在点火时,俄罗斯发射器从火箭背面分离了37颗卫星。在这样的系统中,卫星可能会遭遇火箭推进系统的羽流。使用本发明解决的该方法的局限性是(1)同时沿速度方向和反速度(anti-velocity)方向将卫星分离;(2)避免了羽流相互作用的合适的卫星安装方向;(3)视频成像系统的定位捕获了所有卫星的确切分离,并确保没有羽流相互作用。此外,视频成像系统还捕获了没有羽流的情况。
综上所述,现有技术具有许多局限性。它们都没有提供一种以安全、及时和具有成本效益的方式部署大量卫星的可靠方法。为了克服这些局限,实现了用于使用多级运载火箭部署多颗卫星的创新的任务管理系统和方法。本实施例以独特且经济的方式解决了这些问题中的一个或更多个。
发明内容
用于部署多颗卫星的新颖的任务管理策略具有以下目的:
本发明的主要目的是确切分离多颗卫星。本发明的另一个目的是确保以在前几个轨道中逐渐增加间隙的方式分离多颗卫星。
本发明的又一个目的是确保分离没有任何羽流相互作用的多颗卫星。
本发明的又一个目的是实现一种新颖的上级操控方案,卫星无需任何减速火箭的点火发动被附接至上级,以在卫星从火箭上脱离之后将上级移开。
本发明的另一个目的是消除带有推进单元的任何分配器模块用于辅助卫星部署的使用。
本发明的又一个目的是确保用于部署卫星的分离系统的任何部分都不会阻塞随后分离的卫星的路径。
本发明的另一个目的是在短任务持续时间内完成所有卫星的分离。本发明的又一个目的是提供适当的安装方向,以安全地分离而不会发生任何碰撞。
本发明的另一个目的是通过将视频成像系统定位在适当的位置来捕获所有分离。
根据上述目的,本发明提供了一种用于部署多颗卫星的新颖系统和方法,能够实现上述目的。
在本实施例的一个方面,提供了一种用于从运载火箭发射多颗卫星的系统。该系统包括机械结构、控制单元和图像捕获系统;该机械结构具有一个或更多个安装装置;该控制单元用于控制一个或更多个安装装置以在机械结构中定位和分离多颗卫星;该图像捕获系统用于监控每颗卫星在该机械结构中的定位。该安装装置适于将卫星以在轴向分离、倾斜分离和径向分离中隔开一定距离的方式定位,以确保每颗卫星在短的轨道演化期间内以及长的轨道演化期间内都不会彼此接触。该安装装置适于定位一颗或更多颗卫星。第一组安装装置被布置成用于轴向分离,第二组安装装置被布置成用于倾斜分离,并且第三组安装装置被布置成用于径向分离。分离的主体彼此间隔交叉时分离的主体之间的所需最小距离是基于最大碰撞概率(P
其中R
在本实施例的另一方面,提供了一种用于在运载火箭处使用机械结构来部署和发射多颗卫星的方法。该方法包括以下步骤:(i)将多颗卫星定位在设置于机械结构中的一个或更多个安装装置中,其中,以一定距离布置安装装置以基于最大碰撞概率(P
附图说明
通过仅参考作为非限制性示例给出的附图的以下描述,本发明的优点和特征将变得更加明显,其中:
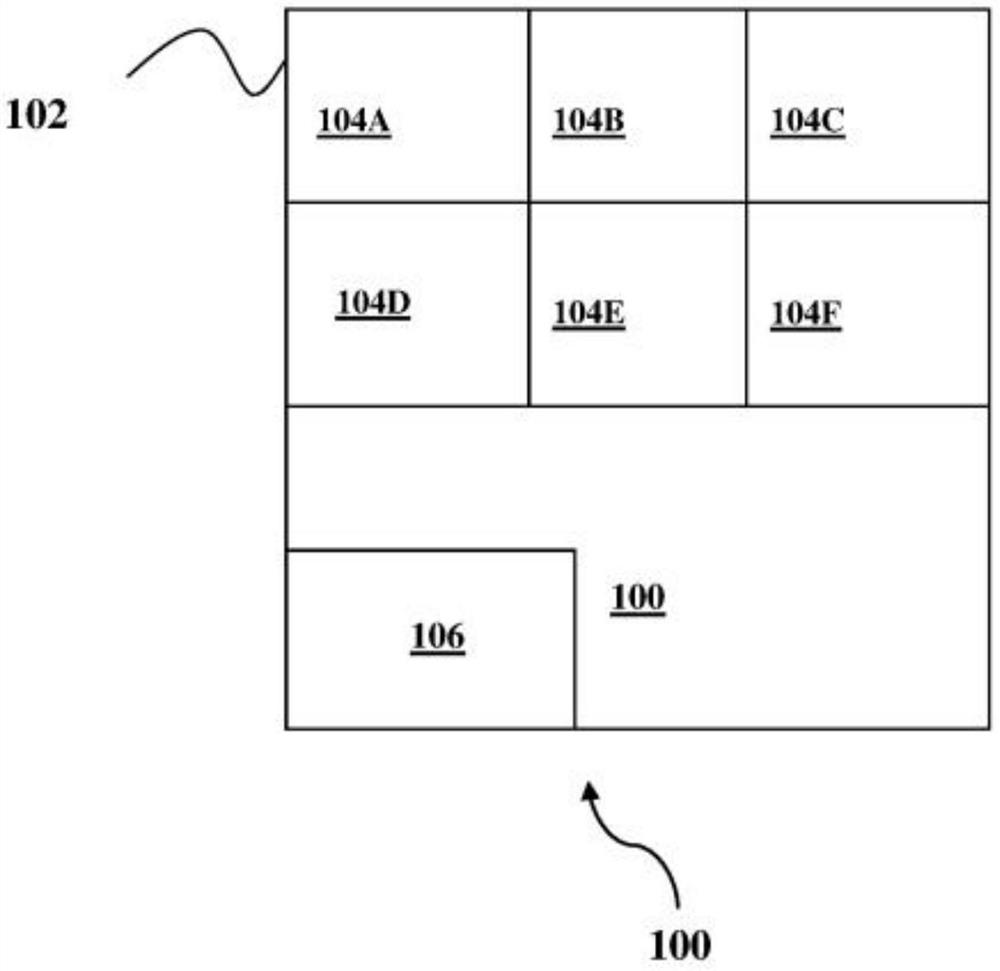
图1示出了根据本文的实施例的用于从运载火箭发射多颗卫星的系统;
图2示出了根据本文的实施例的示出两颗卫星之间的最小距离的示意图;以及
图3示出了根据本文的实施例的用于在运载火箭处使用机械结构来部署和发射多颗卫星的流程图。
具体实施方式
下面将参考附图描述本发明。本文描述了一种用于从运载火箭发射多颗卫星的系统和方法。
以下描述仅是本发明的示例性实施例,并且不限制本发明的范围、适用性或配置。而是,以下描述旨在提供用于实现本发明的各种实施例的方便的说明。显而易见的是,可以对这些实施例中描述的结构/操作特征的功能和布置进行各种改变,而不脱离本文所阐述的本发明的范围。应当理解,本文的描述可以适于与具有不同形状、部件等的替代配置的设备一起使用,并且仍然落入本发明的范围内。因此,本文的详细描述仅出于说明而非限制的目的而给出。
图1示出了根据本文的实施例的用于从运载火箭发射多颗卫星的系统100。系统100包括机械结构102、控制单元106和图像捕获系统(未示出);机械结构102具有一个或更多个安装装置104A-F,控制单元106用于控制一个或更多个安装装置以在机械结构中定位和分离多颗卫星,图像捕获系统(未示出)用于监控每颗卫星在机械结构中的定位。该安装装置适于将卫星以在轴向分离、倾斜分离和径向分离中隔开一定距离的方式定位,以确保每颗卫星在短的轨道演化期间内以及长的轨道演化期间内都不会彼此接触。该安装装置适于定位一颗或更多颗卫星。第一组安装装置被布置成用于轴向分离,第二组安装装置被布置成用于倾斜分离,并且第三组安装装置被布置成用于径向分离。
多卫星部署任务对配置安装和设计卫星分离序列以避免重新接触的可能性提出了挑战,因为将有大量的对应于卫星和耗损级的主体。安装配置将具有以下约束。
1.某些卫星的轴向分离,某些其他卫星的倾斜分离,以及大批其他卫星的径向分离。
2.安装径向分离的卫星,以确保上级控制推进器的羽流与分离的卫星之间不发生相互作用。
3.用于部署卫星的分离系统的任何部分均不得阻塞随后分离的卫星的路径。
除上述安装要求外,卫星分离序列还具有以下任务约束。
1.所有主体对之间的最小距离满足十万分之一的碰撞概率和安装配置中的正裕度(positive margin)。
2.从同一定序器分离的卫星具有至少5s的延迟。
3.用于卫星分离的重新定向的最小数量。
4.所有卫星分离的最短时间。
为了实现卫星的无碰撞长期轨道运动,首先通过在空间和时间上分析性地将卫星适当地定位来进行设计。而后,通过使用全力模型进行轨道传播来调整卫星入轨之间的时间间隔。
在本发明中,多颗卫星的分离是在非常短的时间跨度内完成的(自末级截断不超过1000s),基于任意两对主体之间的距离,相对它们的部署规模达到十万分之一的碰撞概率。另外,分离的主体与上级控制系统的羽流没有相互作用。可以使用如下所示的流程图来说明任务策略。
设计了一种新方法来针对任何给定的碰撞概率计算卫星之间的距离。
卫星/上级的特征半径是包围卫星/上级的球体的半径。令r 1和r2为考虑的两颗卫星的特征半径(参见图2),Rmin为两颗卫星之间的最小距离,Rs(=r 1+r2)为有效碰撞半径。最大碰撞概率为:
在轨道阶段,用于空间物体邻近度分析(SOPA)的碰撞概率阈值是千分之一,而用于碰撞避免(COLA)的碰撞概率阈值是十万分之一。用于COLA的碰撞概率阈值比较保守,可以解决入轨不确定性,而对于常规SOPA和用于轨道操控的SOPA,碰撞概率阈值则松弛。本发明提供了一种用于将多颗小质量卫星分离至圆形轨道的新颖解决方案。
对于以相同的Δv分离的卫星,可以通过选择适当的分离方向来配置分离Δv的轨道内分量。为了达到系统性的分离序列,所有卫星都在轨道平面内分离。通过在轨道平面中选择适当的分离方向,将轨道内Δv分量以期望顺序(降序或升序)排列。为了避免卫星的短期超越,需要使轨道内Δv按其大小降序排列。
除了完全在径向方向上分离的情况,在相反方向上分离的卫星之间总是会有时间段差。因此,我们将卫星分为两组,一组在速度方向上分离,另一组在反速度方向上分离,并求解一组卫星的序列定时,并以相同的定时同时分离另一组卫星。使用介于0.20至0.35度/秒之间的小滚转率以获得用于在轨道平面中分离的期望角度。该设计方法仅用于径向分离。对于轴向分离,所有卫星都以固定的最佳姿态分离,以满足期望最小距离。
在轴向方向上分离卫星之后,进行上级的重新定向,以确保沿速度方向和反速度方向在轨道平面中分离其他卫星。通过在速度方向和反速度方向上将两个分离对分离,可以确保两个分离对之间的速度差。火箭纵轴与轨道法线方向对齐,然后以0.20至0.35度/秒的速率旋转,并选择分离定时,以实现在轨道平面中的分离方向,以提供相同方向上的两个分离之间的轨道内Δv差。这确保了分离的两颗卫星在短的轨道演化期间内以及长的期轨道演化期间内不会相互接触。
由于速度矢量在一个轨道上从0度旋转到360度,即使火箭不旋转,该序列也起作用。卫星分离的方向将相对于局部平面自然地变化,从而以适当的速率对圆形轨道提供火箭自然滚转的效果(假设火箭纵轴与轨道法向矢量对齐)。该速率另外可用于意向滚转率的情况。由于速率极小,因此分离过程将花费更长的时间。该方法还包括使用适当定位的相机拍摄所有卫星分离事件的视觉资料。
例如,以围绕火箭偏航轴对称的方式布置了25个四方组件(Quad Packs,包含101颗卫星)、两个ISRO微纳卫星(Nanosat)和主要卫星的安装,从而使任何分离的卫星都不会凭借其本身的安装进入控制系统羽流。然后,使用包围每颗卫星的最大部署尺寸的球体来计算每对卫星之间的最小距离,以确保十万分之一的碰撞概率。分离序列被设计成具有意向滚转率,以在有限的时间间隙内同时在速度方向和反速度方向上分离两颗径向分离的卫星,从而确保所有5460对物体的间隙在前10个轨道上都渐增。
图3示出了根据本文的实施例的用于在运载火箭处使用机械结构来部署和发射多颗卫星的流程图300。在步骤302中,将设置在机械结构中的一个或更多个安装装置中的多颗卫星定位,其中将安装装置以一定距离布置,以基于最大碰撞概率(Pmax)满足长期无碰撞要求。在步骤304中,将轴向方向上的第一组卫星和径向方向上的第二组卫星与多颗卫星分离。在步骤306中,将第二组卫星基于速度方向和反速度方向分为两组。在步骤308中,以在0.20至0.35度之间的小的滚转率将卫星分组在两组中的任一个组之下,以确保沿着速度方向和反速度方向在轨道平面中的卫星的分离被重新定向和分离。在步骤310中,将沿轴向方向布置的第一组卫星、沿径向方向布置的第二组卫星的一部分和沿倾斜方向布置的第二组卫星的其余部分从运载火箭发射,以采用适当的轨道内Δv分布来分离卫星。视频成像系统被正确安装和定位,其可以捕获所有分离事件。分离步骤确保可以以最佳姿态分离所有卫星,以满足所有分离的期望最小距离。重新定向步骤实现了在0.20至0.35度之间的滚转率可控性,以获得在轨道平面中的期望的分离角度和分离方向。选择滚转率和分离定时,以实现在轨道平面中的分离方向,从而提供两个分离之间的期望轨道内Δv差,以确保两颗分离的卫星在短的轨道演化期间内以及长的轨道演化期间内不会彼此接触。分离步骤可确保上级控制推进器的羽流与分离卫星之间不存在相互作用。
本实施例促进了用于在短时间内安全部署多颗卫星的系统和方法。该方法包括:设计用于多颗卫星的安装配置以确保安全分离,并利用操控配置分离序列以确保多颗卫星的确切分离和分离的卫星之间的安全移动,并防止在分离过程中卫星与运载火箭控制系统羽流之间的任何相互作用。最后确定卫星的分离方向,以使分离后卫星将不可能进入控制系统羽流。一旦确定,就可以通过调整分离时间来完成邻近度分析,以在分离的卫星之间具有足够的间隙。该方法还包括:使用适当定位的视频成像系统捕获所有卫星分离事件的视频图像。本实施例的技术优点如下:
1.实现了第一批待分离卫星的轴向分离,第二批待分离卫星的倾斜分离以及其余卫星的径向分离。
2.确保了所有卫星分离均在短的任务持续时间内完成,与没有操控的正常序列相比,级截断后具有十万分之一的碰撞概率。
3.确保了从同一定序器分离的卫星的最小时间延迟。
4.重新定向的最小次数被用于卫星分离。
5.确保了在前10个轨道上所有分离的卫星之间的间隙不断增加。
应当理解,以上描述旨在是说明性的而非限制性的。在阅读和理解以上描述之后,许多其他实施例对于本领域技术人员将是显而易见的。尽管已经参考特定的示例性实施例描述了本发明,但是将认识到,本发明不限于所描述的实施例,而是可以在所附权利要求的精神和范围内进行修改和变型来实施。因此,说明书和附图应被认为是说明性的而不是限制性的。因此,本发明的范围应参考所附权利要求书以及这些权利要求书所赋予的等同物的全部范围来确定。
- 用于从运载火箭发射多颗卫星的系统和方法
- 用于多颗卫星并行测试的太阳电池阵模拟系统的构建方法