一种飞行器抗载荷座椅
文献发布时间:2023-06-19 10:52:42
技术领域
本发明涉及飞行器座椅技术领域,尤其是涉及一种飞行器抗载荷座椅。
背景技术
随着超高音速飞机及空天飞机航天器的不断发展,飞行器的加速度已经超过了人体昏厥的极限载荷。
现有技术中的飞行器座椅不具备削弱加速度载荷的效果,除非经过特种训练,普通人已经无法随意驾驶超高音速飞机及空天飞机航天器,训练后的驾驶员也面临无法适应更快加速度的超高音速飞机及空天飞机航天器。
发明内容
本发明提供了一种飞行器抗载荷座椅,旨在解决现有飞行器座椅不具备削弱加速度载荷的问题。
本发明提供了一种飞行器抗载荷座椅,包括:底座、旋转转台组件、液压缸组件以及镂空座椅;所述底座内部封装水银;所述旋转转台组件安装在底座上,所述旋转转台组件作水平旋转运动;所述液压缸组件的底部与所述旋转转台组件相固接,所述液压缸组件的顶部与所述镂空座椅相固接。
进一步地,所述旋转转台组件包括:电控回转支撑以及转台;所述电控回转支撑与所述转台相连接,以用于驱动转台作回转运动。
电控回转支撑一方面起到支撑的作用,另一方面用于驱动转台作回转运动;当飞行员坐在座椅上受到加速度载荷作用时,电控回转支撑驱动转台顺时针或者逆时针旋转,旋转方向与加速度方向相反,减弱水平平面的转动惯性加速度。
进一步地,所述电控回转支撑包括电机、角位移传感器以及旋转轴;所述角位移传感器与所述电机电连接;所述旋转轴的一端与所述电机的输出端连接,所述旋转轴的另一端与所述转台连接。
角位移传感器捕捉转动惯性加速度信号,将信号传递给电机,电机的输出端带动旋转轴旋转,进而驱动转台旋转,旋转方向与惯性加速度方向相反,减弱水平平面的转动惯性加速度。
进一步地,所述液压缸组件包括液压缸、中枢控制;所述液压缸的数量不少于三个,所述中枢控制分别与所述液压缸电连接;所述液压缸的底部与所述旋转转台组件相固接,所述液压缸的顶部与所述镂空座椅相固接。
中枢控制用于接收飞行器的信息,中枢控制处理信息并控制液压缸液压收缩运动,使液压缸作惯性加速度方向反向运动,削弱六个自由度的惯性加速度;两点确定平面,三点确定空间,三个液压缸就能驱动座椅作立体运动。
进一步地,所述液压缸的数量为六个。六个液压缸能够更加稳定的削弱六个自由度的惯性加速度。
进一步地,所述液压缸的顶部为螺杆,所述液压缸与所述镂空座椅螺栓连接。
进一步地,所述镂空座椅采用弹性材料制成。
弹性材料制成的镂空座椅进一步加强阻尼作用,削弱惯性加速度。
进一步地,所述镂空座椅的形状为半圆形。
进一步地,所述转台水平设置在所述旋转轴上。水平设置的转台能够削弱水平方向的惯性加速度。
进一步地,所述镂空座椅的两侧还包括扶手。
本发明提供的一种飞行器抗载荷座椅,三方面削弱惯性加速度:第一,通过在底座内部封装水银,利用水银常温液态及超高的密度使座椅在水平平面上具有液态自稳定性及抵抗惯性加速度的特性;第二,通过旋转转台组件与加速度方向反向运动,减弱水平平面的转动惯性加速度;第三,通过液压缸组件作液压收缩运动,使液压缸组件与惯性加速度方向反向运动,削弱六个自由度的惯性加速度;很好地解决了现有飞行器座椅不具备削弱加速度载荷的问题。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
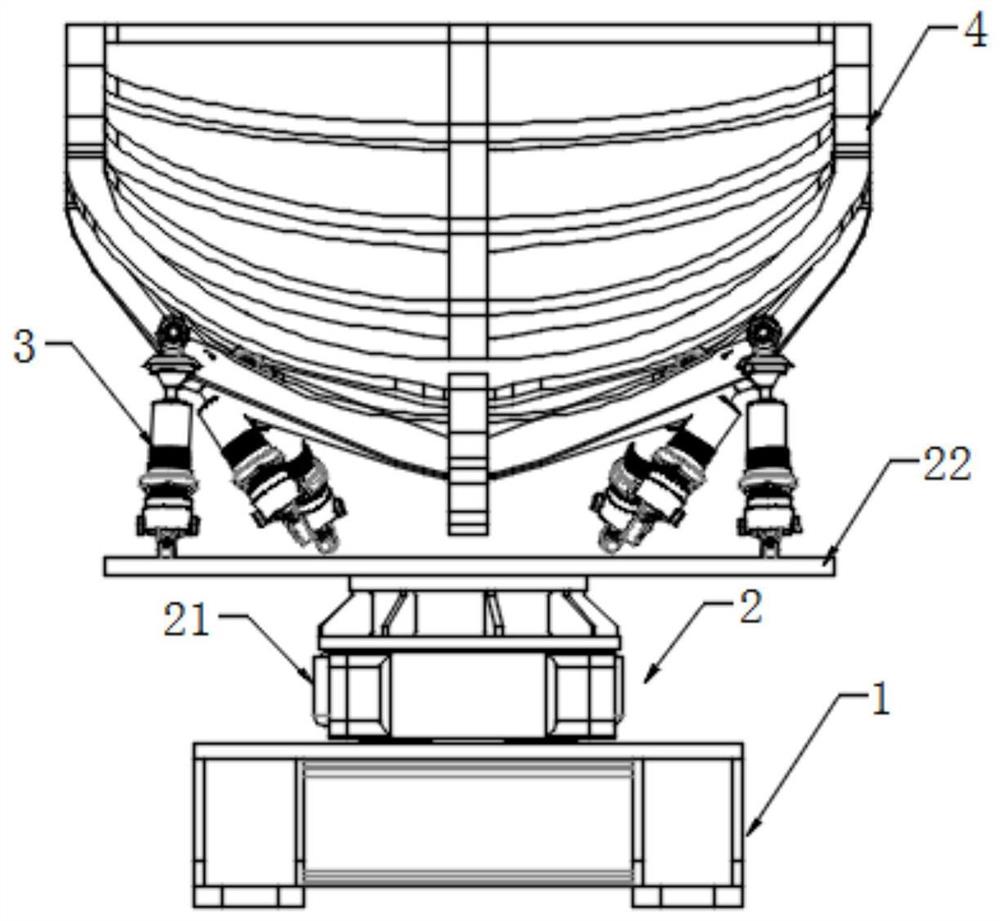
图1为本发明实施例提供的飞行器抗载荷座椅的主视图;
图2为本发明实施例提供的飞行器抗载荷座椅的侧视图。
附图标记说明:
1为底座;2为旋转转台组件,21为电控回转支撑,22为转台;3为液压缸,31为螺杆;4为镂空座椅,41为扶手。
具体实施方式
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要理解的是,术语"中心"、"纵向"、"横向"、"长度"、"宽度"、"厚度"、"上"、"下"、"前"、"后"、"左"、"右"、"竖直"、"水平"、"顶"、"底"、"内"、"外"、"顺时针"、"逆时针"等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语"第一"、"第二"仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有"第一"、"第二"的特征可以明示或者隐含地包括一个或者更多个所述特征。在本发明的描述中,"多个"的含义是两个或两个以上,除非另有明确具体的限定。此外,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
参阅图1-2所示,本发明提供了一种飞行器抗载荷座椅,抗载荷原理为增加阻尼作用,其包括:底座1、旋转转台组件2、液压缸组件以及镂空座椅4;所述底座1内部封装水银;所述旋转转台组件2安装在底座1上,所述旋转转台组件2作水平旋转运动;所述液压缸组件的底部与所述旋转转台组件2相固接,所述液压缸组件的顶部与所述镂空座椅4相固接。
具体而言,底座1的上方安装旋转转台组件2,底座1内填充有常温液态以及高密度的液体,以用于抵抗惯性加速度。
进一步地,所述液体为水银,利用水银常温液态及超高的密度使座椅在水平平面上具有液态自稳定性及抵抗惯性加速度的特性。
具体而言,旋转转台组件2安装在底座上,所述旋转转台组件2作水平旋转运动,以用于减弱水平平面的转动惯性加速度;所述旋转转台组件2包括电控回转支撑21以及转台22;所述电控回转支撑21与所述转台22相连接,以用于驱动转台22作回转运动。电控回转支撑21一方面起到支撑的作用,另一方面用于驱动转台22作回转运动;当飞行员坐在座椅上受到加速度载荷作用时,电控回转支撑21驱动转台22顺时针或者逆时针旋转,旋转方向与加速度方向相反,减弱水平平面的转动惯性加速度。
进一步地,所述电控回转支撑21包括电机、角位移传感器以及旋转轴(电机、角位移传感器以及旋转轴图中均未示出);所述角位移传感器与所述电机电连接;所述旋转轴的一端与所述电机的输出端连接,所述旋转轴的另一端与所述转台连接。
其中,角位移传感器捕捉转动惯性加速度信号,将信号传递给电机,电机的输出端带动旋转轴旋转,进而驱动转台旋转,旋转方向与惯性加速度方向相反,减弱水平平面的转动惯性加速度。
进一步地,所述转台22水平设置在所述旋转轴上。水平设置的转台22能够削弱水平方向的惯性加速度。
具体而言,液压缸组件的底部与转台相固接,液压缸组件的顶部与镂空座椅4相固接;液压缸组件作液压收缩运动,使液压缸组件与惯性加速度方向反向运动,从而削弱六个自由度的惯性加速度。其中,六个自由度包括沿x轴平移,沿y轴平移,沿z轴平移,绕x轴转动,绕y轴转动,绕z轴转动。
进一步地,所述液压缸组件包括液压缸31、中枢控制(中枢控制图中未示出);所述中枢控制分别与所述液压缸31电连接;所述液压缸31的底部与所述旋转转台组件2相固接,所述液压缸31的顶部与所述镂空座椅4相固接。
中枢控制用于接收飞行器的信息,中枢控制处理信息并控制液压缸31液压收缩运动,使液压缸31作惯性加速度方向反向运动,削弱六个自由度的惯性加速度。
进一步地,所述液压缸31的数量不少于三个,两点确定平面,三点确定空间,三个液压缸31就能驱动座椅作立体运动。
进一步地,所述液压缸31的数量为六个。六个液压缸31能够更加稳定的削弱六个自由度的惯性加速度。
进一步地,所述液压缸31的顶部为螺杆,所述液压缸31与所述镂空座椅4螺栓连接。
具体而言,镂空座椅4的底部与所述液压缸31连接,所述镂空座椅4悬空设置;所述镂空座椅4采用弹性材料制成。弹性材料制成的镂空座椅4进一步加强阻尼作用,削弱惯性加速。
进一步地,所述镂空座椅4的形状为半圆形,半圆形的形状,方便飞行员乘坐还能够对飞行员起到保护作用。
进一步地,所述镂空座椅4的两侧还包括扶手41。
因此,本发明提供的一种飞行器抗载荷座椅,三方面削弱惯性加速度:第一,通过在底座内部封装水银,利用水银常温液态及超高的密度使座椅在水平平面上具有液态自稳定性及抵抗惯性加速度的特性;第二,通过旋转转台组件与加速度方向反向运动,减弱水平平面的转动惯性加速度;第三,通过液压缸组件作液压收缩运动,使液压缸组件与惯性加速度方向反向运动,削弱六个自由度的惯性加速度;很好地解决了现有飞行器座椅不具备削弱加速度载荷的问题。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
- 一种飞行器抗载荷座椅
- 飞行器座椅装置和具有飞行器座椅装置的飞行器