一种用于林业的对靶喷药无人机
文献发布时间:2023-06-19 10:52:42
技术领域
本发明涉及林业喷药设备技术领域,具体是涉及一种用于林业的对靶喷药无人机。
背景技术
林业植物的病虫害防治一直是林业工作人员的重要工作任务之一。由于林业作业区域较大,作业点较分散,作业区域不集中,造成林业工作人员经常背着设备器械徒步或者借助简单的交通工具在林地里移动进行作业。目前,随着无人机技术的不断发展,利用无人机进行林业作业,特别是无人机加载喷药装置对林业植物进行喷洒,已经获得了快速发展。以旋翼无人机为代表的无人机具有可定点停留,按预定轨迹喷洒,受地面环境影响小等优点,已为林业作业人员节省了很大的人力和物力。但是在对林业作业无人机及喷药装置使用的过程中总结发现,作业无人机需要人全程操作,并进行平均喷洒式的药物喷洒作业,常常是靶植物和非靶植物受到的药物喷洒量相同。药物喷洒量大,无效的药物喷洒多。针对此类问题,需要提出一种用于林业的对靶喷药无人机,可以对控制喷头位置,可根据控制单元进行实时控制的装置,配合图像识别技术,对靶植物进行精准喷洒,减少对非靶植物的药物喷洒量,来满足林业作业人员的作业需求,减少药物浪费用,节约成本,保护环境。
发明内容
为解决上述技术问题,提供一种用于林业的对靶喷药无人机,本技术方案可根据控制单元进行实时控制的装置,配合图像识别技术,对靶植物进行精准喷洒,减少对非靶植物的药物喷洒量,来满足林业作业人员的作业需求,减少药物浪费用,节约成本,保护环境。
为达到以上目的,本发明采用的技术方案为:
一种用于林业的对靶喷药无人机,包括:无人机;
包括:可调节喷射装置;
可调节喷射装置包括:
支撑框架,设置于无人机的底部;
水平调节机构,设置于支撑框架中部;
模块带动机构,有两个,两个模块带动机构均设置于水平调节机构的输出端,水平调节机构用于驱动两个模块带动机构互相靠近或者互相远离;
第一调节组件和第二调节组件,对称设置于支撑框架的两侧,第一调节组件和第二调节组件的结构一致,第一调节组件有两个活动端;
角度调节机构,有两个,两个角度调节机构分别设置于两个模块带动机构的非工作部;
喷头,有多个,多个喷头分别设置于两个角度调节机构的输出端,多个喷头分别设置于第一调节组件和第二调节组件的两个活动端上;
位置锁死机构,设置于支撑框架上,位置锁死机构用于对第一调节组件和第二调节组件的两个活动端进行固定;
保护仓机构,设置于支撑框架的底部,保护仓机构用于对多个喷头及其他机构进行保护。
优选的,水平调节机构包括:
螺纹杆,设置于支撑框架的中部并与其可转动连接,螺纹杆上的螺纹呈对向设置,两个模块带动机构的非工作部均与螺纹杆螺纹连接;
导向杆,设置于支撑框架的中部并与其固定连接,两个模块带动机构的非工作部与导向杆滑动连接;
第一伺服电机,设置于支撑框架上,第一伺服电机的输出端与螺纹杆连接。
优选的,模块带动机构包括:
活动块,活动块与螺纹杆螺纹连接,活动块与导向杆滑动连接,角度调节机构设置于活动块的底部;
齿轮,设置于活动块的内部并与其可转动连接;
第一齿条和第二齿条,对称设置于活动块的内部并与其滑动连接,第一齿条和第二齿条均与齿轮啮合,第一齿条的第二齿条的输出端均设有插杆。
优选的,第一调节组件和第二调节组件的结构一致,第一调节组件包括:
六棱杆,设置于支撑框架的一侧并与其固定连接,喷头设置于六棱杆的底部;
第一滑动块和第二滑动块,均设置于六棱杆上并与其滑动连接,第一滑动块和第二滑动块的结构一致,第一滑动块的一面设有带动孔,带动孔用于与插杆连接,第一滑动块的另一面设有固定孔,固定孔用于与位置锁死机构的输出端连接。
优选的,角度调节机构包括:
固定架,设置于模块带动机构的底部;
角度驱动组件,设置于固定架上;
翻转架,设置于角度驱动组件的输出端,喷头设置于翻转架上。
优选的,角度驱动组件包括:
第三伺服电机,设置于固定架上;
蜗杆,设置于第三伺服电机的输出端;
扇形齿板,设置于固定架上并与其可转动连接,翻转架与扇形齿板固定连接,蜗杆和扇形齿板啮合。
优选的,位置锁死机构包括:
宽阔手指气缸,设置于支撑框架的顶部并与其固定连接
第一插板和第二插板,分别设置于宽阔手指气缸的两个输出端,第一插板和第二插板上均设有两个插杆,插杆用于与固定孔连接。
优选的,保护仓机构包括:
环绕框板,设置于支撑框架的底部;
第一翻转板和第二翻转板,对称设置于环绕框板的底部并与其铰接,第一翻转板和第二翻转板的两端分别设置有铰接件;
开合驱动组件,设置于环绕框板的一端,并且开合驱动组件通过铰接件与第一翻转板和第二翻转板传动连接;
开合引导组件,设置于环绕框板的另一端,并且开合引导组件通过铰接件与第一翻转板和第二翻转板连接。
优选的,开合驱动组件包括:
推动气缸,设置于环绕框板的一端;
第一滑动杆,分别与第一翻转板和第二翻转板一端的铰接件滑动连接,推动气缸的输出端与第一滑动杆连接。
优选的,开合引导组件包括:
第二滑动杆,分别与第一翻转板和第二翻转板的一端铰接件滑动连接;
限位杆,对称设置于第二滑动杆的顶部;
引导板,设置于环绕框板上,限位杆与引导板滑动连接。
本发明与现有技术相比具有的有益效果是:工作人员通过操纵无人机驱动可调节喷射装置移动至工作地点,首先保护仓机构开始工作,保护仓机构的输出端向外翻转后打开,使得多个喷头露出,此时可根据控制单元进行实时控制的装置,配合图像识别技术对多个喷头的位置进行调整,当植物处于无人机航线的两侧时,两个模块带动机构开始工作,一个模块带动机构的输出端分别连接第一调节组件和第二调节组件的第一活动端,另一个模块带动机构的输出端分别连接第一调节组件和第二调节组件的第二活动端,水平调节机构开始工作,水平调节机构的输出端驱动两个模块带动机构互相远离,使得两个模块带动机构分别位于支撑框架的两端,并且每个模块带动机构均带动第一调节组件和第二调节组件的一个活动端随其移动,最终呈现为一共六个喷头分别处于支撑框架的两端,喷头与现有的输药机构连接,通过六个分别位于支撑框架两侧的喷头对无人机航线两侧植物进行喷药,但需要进行精确的角度喷射式,通过两个角度调节机构对其输出端内的喷头角度进行调节,两个在角度调节机构调节角度后的喷头对植物进行精确喷药,如果植物的分布情况比较平均时,两个模块带动机构无需工作,通过位置锁死机构对第一调节组件和第二调节组件的两个活动端位置进行固定,水平调节机构的输出端通过两个模块带动机构带动两个角度调节机构互相远离,两个角度调节机构的输出端内的喷头随其移动,最终呈现为两个喷头位于支撑框架的两端,四个喷头集中在支撑框架的中部,通过分散开来的角度调节机构个喷头对植物进行喷药,当植物的分布集中在无人机航线的中部时,六个喷头维持原位置进行作业;
1、通过保护仓机构的设置,可以防止机构受到外力损伤;
2、通过本设备的设置,可根据控制单元进行实时控制的装置,配合图像识别技术,对靶植物进行精准喷洒,减少对非靶植物的药物喷洒量,来满足林业作业人员的作业需求,减少药物浪费用,节约成本,保护环境。
附图说明
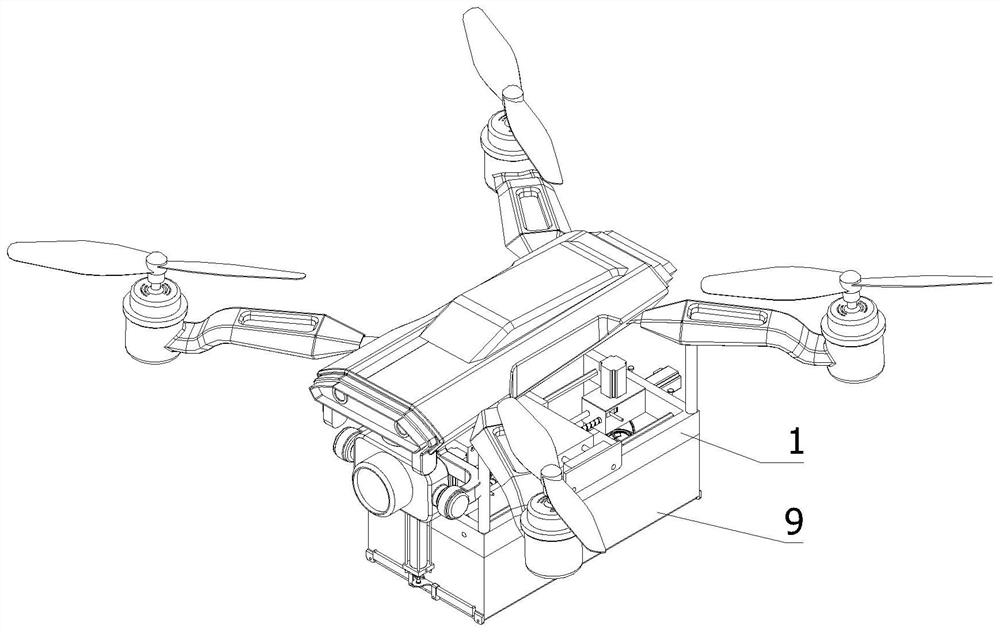
图1为本发明的无人机和可调节式喷射装置的立体结构示意图一;
图2为本发明的无人机和可调节式喷射装置的立体结构示意图二;
图3为本发明的支撑框架、水平调节机构、模块带动机构、第一调节组件、第二调节组件、角度调节机构和位置锁死机构的立体结构示意图一;
图4为本发明的支撑框架、水平调节机构、模块带动机构、第一调节组件、第二调节组件、角度调节机构和位置锁死机构的立体结构示意图二;
图5为本发明的模块带动机构的内部结构示意图;
图6为本发明的第一调节组件的立体结构示意图一;
图7为本发明的第一调节组件的立体结构示意图二;
图8为本发明的角度调节机构的立体结构示意图一;
图9为本发明的角度调节机构的主视图;
图10为本发明的可调节式喷射装置的立体结构示意图一;
图11位本发明的图10的A处放大图;
图12位本发明的可调节式喷射装置的立体结构示意图二。
图中标号为:
1-支撑框架;
2-水平调节机构;2a-螺纹杆;2b-导向杆;2c-第一伺服电机;
3-模块带动机构;3a-活动块;3b-齿轮;3c-第一齿条;3d-第二齿条;3e-第二伺服电机;
4-第一调节组件;4a-六棱杆;4b-第一滑动块;4b1-带动孔;4b2-固定孔;4c-第二滑动块;
5-第二调节组件;
6-角度调节机构;6a-固定架;6b-角度驱动组件;6b1-第三伺服电机;6b2-蜗杆;6b3-扇形齿板;6c-翻转架;
7-喷头;
8-位置锁死机构;8a-宽阔手指气缸;8b-第一插板;8c-第二插板;
9-保护仓机构;9a-环绕框板;9b-第一翻转板;9c-第二翻转板;9d-开合驱动组件;9d1-推动气缸;9d2-第一滑动杆;9e-开合引导组件;9e1-第二滑动杆;9e2-限位杆;9e3-引导板。
具体实施方式
以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
参照图1至图3所示,一种用于林业的对靶喷药无人机,包括:无人机;
包括:可调节喷射装置;
可调节喷射装置包括:
支撑框架1,设置于无人机的底部;
水平调节机构2,设置于支撑框架1中部;
模块带动机构3,有两个,两个模块带动机构3均设置于水平调节机构2的输出端,水平调节机构2用于驱动两个模块带动机构3互相靠近或者互相远离;
第一调节组件4和第二调节组件5,对称设置于支撑框架1的两侧,第一调节组件4和第二调节组件5的结构一致,第一调节组件4有两个活动端;
角度调节机构6,有两个,两个角度调节机构6分别设置于两个模块带动机构3的非工作部;
喷头7,有多个,多个喷头7分别设置于两个角度调节机构6的输出端,多个喷头7分别设置于第一调节组件4和第二调节组件5的两个活动端上;
位置锁死机构8,设置于支撑框架1上,位置锁死机构8用于对第一调节组件4和第二调节组件5的两个活动端进行固定;
保护仓机构9,设置于支撑框架1的底部,保护仓机构9用于对多个喷头7及其他机构进行保护;
工作人员通过操纵无人机驱动可调节喷射装置移动至工作地点,首先保护仓机构9开始工作,保护仓机构9的输出端向外翻转后打开,使得多个喷头7露出,此时可根据控制单元进行实时控制的装置,配合图像识别技术对多个喷头7的位置进行调整,当植物处于无人机航线的两侧时,两个模块带动机构3开始工作,一个模块带动机构3的输出端分别连接第一调节组件4和第二调节组件5的第一活动端,另一个模块带动机构3的输出端分别连接第一调节组件4和第二调节组件5的第二活动端,水平调节机构2开始工作,水平调节机构2的输出端驱动两个模块带动机构3互相远离,使得两个模块带动机构3分别位于支撑框架1的两端,并且每个模块带动机构3均带动第一调节组件4和第二调节组件5的一个活动端随其移动,最终呈现为一共六个喷头7分别处于支撑框架1的两端,喷头7与现有的输药机构连接,通过六个分别位于支撑框架1两侧的喷头7对无人机航线两侧植物进行喷药,但需要进行精确的角度喷射式,通过两个角度调节机构6对其输出端内的喷头7角度进行调节,两个在角度调节机构6调节角度后的喷头7对植物进行精确喷药,如果植物的分布情况比较平均时,两个模块带动机构3无需工作,通过位置锁死机构8对第一调节组件4和第二调节组件5的两个活动端位置进行固定,水平调节机构2的输出端通过两个模块带动机构3带动两个角度调节机构6互相远离,两个角度调节机构6的输出端内的喷头7随其移动,最终呈现为两个喷头7位于支撑框架1的两端,四个喷头7集中在支撑框架1的中部,通过分散开来的角度调节机构6个喷头7对植物进行喷药,当植物的分布集中在无人机航线的中部时,六个喷头7维持原位置进行作业。
如图4所示水平调节机构2包括:
螺纹杆2a,设置于支撑框架1的中部并与其可转动连接,螺纹杆2a上的螺纹呈对向设置,两个模块带动机构3的非工作部均与螺纹杆2a螺纹连接;
导向杆2b,设置于支撑框架1的中部并与其固定连接,两个模块带动机构3的非工作部与导向杆2b滑动连接;
第一伺服电机2c,设置于支撑框架1上,第一伺服电机2c的输出端与螺纹杆2a连接;
水平调节机构2开始工作,第一伺服电机2c带动螺纹杆2a转动,螺纹杆2a带动两个模块带动机构3沿导向杆2b互相远离。
如图5所示模块带动机构3包括:
活动块3a,活动块3a与螺纹杆2a螺纹连接,活动块3a与导向杆2b滑动连接,角度调节机构6设置于活动块3a的底部;
齿轮3b,设置于活动块3a的内部并与其可转动连接;
第一齿条3c和第二齿条3d,对称设置于活动块3a的内部并与其滑动连接,第一齿条3c和第二齿条3d均与齿轮3b啮合,第一齿条3c的第二齿条3d的输出端均设有插杆;
水平调节机构2开始工作,第一伺服电机2c带动螺纹杆2a转动,螺纹杆2a带动两个活动块3a沿导向杆2b互相远离,模块带动机构3开始工作,第二伺服电机3e的输出端带动齿轮3b转动,齿轮3b分别带动第一齿条3c和第二齿条3d伸出,第一齿条3c和第二齿条3d分别通过插杆与第一调节组件4和第二调节组件5的第一活动端连接。
如图6和图7所示第一调节组件4和第二调节组件5的结构一致,第一调节组件4包括:
六棱杆4a,设置于支撑框架1的一侧并与其固定连接,喷头7设置于六棱杆4a的底部;
第一滑动块4b和第二滑动块4c,均设置于六棱杆4a上并与其滑动连接,第一滑动块4b和第二滑动块4c的结构一致,第一滑动块4b的一面设有带动孔4b1,带动孔4b1用于与插杆连接,第一滑动块4b的另一面设有固定孔4b2,固定孔4b2用于与位置锁死机构8的输出端连接;
六棱杆4a用对第一滑动块4b和第二滑动块4c的移动方向进行引导,第一滑动块4b和第二滑动块4c用于支撑喷头7,带动孔4b1用于模块带动机构3的插杆与其连接并带动其移动,固定孔4b2用于位置锁死机构8的输出端与其连接并对其固定。
如图8所示角度调节机构6包括:
固定架6a,设置于模块带动机构3的底部;
角度驱动组件6b,设置于固定架6a上;
翻转架6c,设置于角度驱动组件6b的输出端,喷头7设置于翻转架6c上;
角度调节机构6开始工作,角度驱动组件6b开始工作角度驱动组件6b的输出端带动翻转架6c进行角度转动,翻转架6c带动喷头7随其转动。
如图9所示角度驱动组件6b包括:
第三伺服电机6b1,设置于固定架6a上;
蜗杆6b2,设置于第三伺服电机6b1的输出端;
扇形齿板6b3,设置于固定架6a上并与其可转动连接,翻转架6c与扇形齿板6b3固定连接,蜗杆6b2和扇形齿板6b3啮合;
角度驱动组件6b开始工作,第三伺服电机6b1的输出端带动蜗杆6b2转动,蜗杆6b2带动扇形齿板6b3进行角度转动,扇形齿板6b3带动翻转架6c角度转动,翻转架6c带动喷头7随其转动。
如图4所示位置锁死机构8包括:
宽阔手指气缸8a,设置于支撑框架1的顶部并与其固定连接
第一插板8b和第二插板8c,分别设置于宽阔手指气缸8a的两个输出端,第一插板8b和第二插板8c上均设有两个插杆,插杆用于与固定孔4b2连接;
位置锁死机构8开始工作,宽阔手指气缸8a的两个输出端带动第一插板8b和第二插板8c互相靠近,第一插板8b和第二插板8c各通过两个插杆分别将两个第一滑动块4b和两个第二滑动块4c进行固定。
如图10所示保护仓机构9包括:
环绕框板9a,设置于支撑框架1的底部;
第一翻转板9b和第二翻转板9c,对称设置于环绕框板9a的底部并与其铰接,第一翻转板9b和第二翻转板9c的两端分别设置有铰接件;
开合驱动组件9d,设置于环绕框板9a的一端,并且开合驱动组件9d通过铰接件与第一翻转板9b和第二翻转板9c传动连接;
开合引导组件9e,设置于环绕框板9a的另一端,并且开合引导组件9e通过铰接件与第一翻转板9b和第二翻转板9c连接;
保护仓机构9开始工作,开合驱动组件9d开始工作,开合驱动组件9d的输出端通过铰接件推动第一翻转板9b和第二翻转板9c分别向外进行翻转,使得环绕框板9a的底部打开,开合引导组件9e用于通过铰接件对第一翻转板9b和第二翻转板9c的打开方向进行引导。
如图11所示开合驱动组件9d包括:
推动气缸9d1,设置于环绕框板9a的一端;
第一滑动杆9d2,分别与第一翻转板9b和第二翻转板9c一端的铰接件滑动连接,推动气缸9d1的输出端与第一滑动杆9d2连接;
开合驱动组件9d开始工作,推动气缸9d1的输出端推动第一滑动杆9d2向下一等功,第一滑动杆9d2通过铰接件推动第一翻转板9b和第二翻转板9c分别向外翻翻转,使得环绕框板9a的底部打开。
如图12所示开合引导组件9e包括:
第二滑动杆9e1,分别与第一翻转板9b和第二翻转板9c的一端铰接件滑动连接;
限位杆9e2,对称设置于第二滑动杆9e1的顶部;
引导板9e3,设置于环绕框板9a上,限位杆9e2与引导板9e3滑动连接;
第二滑动杆9e1用于连接支撑,限位杆9e2和引导板9e3用于对第二滑动杆9e1的移动方向进行引导。
本发明的工作原理:工作人员通过操纵无人机驱动可调节喷射装置移动至工作地点,首先保护仓机构9开始工作,开合驱动组件9d开始工作,开合驱动组件9d的输出端通过铰接件推动第一翻转板9b和第二翻转板9c分别向外进行翻转,使得环绕框板9a的底部打开,使得多个喷头7露出,此时可根据控制单元进行实时控制的装置,配合图像识别技术对多个喷头7的位置进行调整,当植物处于无人机航线的两侧时,两个模块带动机构3开始工作,第一模块带动机构3开始工作,第二伺服电机3e的输出端带动齿轮3b转动,齿轮3b分别带动第一齿条3c和第二齿条3d伸出,第一齿条3c和第二齿条3d分别通过插杆与第一调节组件4和第二调节组件5的第一活动端连接,第二模块带动机构3开始工作,第二伺服电机3e的输出端带动齿轮3b转动,齿轮3b分别带动第一齿条3c和第二齿条3d伸出,第一齿条3c和第二齿条3d分别通过插杆与第一调节组件4和第二调节组件5的第二活动端连接,第一伺服电机2c带动螺纹杆2a转动,螺纹杆2a带动两个模块带动机构3沿导向杆2b互相远离,使得两个模块带动机构3分别位于支撑框架1的两端,并且每个模块带动机构3均带动第一调节组件4和第二调节组件5的一个活动端随其移动,最终呈现为一共六个喷头7分别处于支撑框架1的两端,喷头7与现有的输药机构连接,通过六个分别位于支撑框架1两侧的喷头7对无人机航线两侧植物进行喷药,但需要进行精确的角度喷射式,角度驱动组件6b开始工作角度驱动组件6b的输出端带动翻转架6c进行角度转动,翻转架6c带动喷头7随其转动,两个在角度调节机构6调节角度后的喷头7对植物进行精确喷药,如果植物的分布情况比较平均时,两个模块带动机构3无需工作,通过位置锁死机构8对第一调节组件4和第二调节组件5的两个活动端位置进行固定,水平调节机构2的输出端通过两个模块带动机构3带动两个角度调节机构6互相远离,两个角度调节机构6的输出端内的喷头7随其移动,最终呈现为两个喷头7位于支撑框架1的两端,四个喷头7集中在支撑框架1的中部,通过分散开来的角度调节机构6个喷头7对植物进行喷药,当植物的分布集中在无人机航线的中部时,六个喷头7维持原位置进行作业。
本装置通过以下步骤实现本发明的功能,进而解决了本发明提出的技术问题:
步骤一、工作人员通过操纵无人机驱动可调节喷射装置移动至工作地点;
步骤二、工作人员通过操纵无人机驱动可调节喷射装置移动至工作地点,保护仓机构9开始工作,保护仓机构9的输出端向外翻转后打开,使得多个喷头7露出;
步骤三、当植物处于无人机航线的两侧时,两个模块带动机构3开始工作,一个模块带动机构3的输出端分别连接第一调节组件4和第二调节组件5的第一活动端,另一个模块带动机构3的输出端分别连接第一调节组件4和第二调节组件5的第二活动端,水平调节机构2开始工作,水平调节机构2的输出端驱动两个模块带动机构3互相远离,使得两个模块带动机构3分别位于支撑框架1的两端,并且每个模块带动机构3均带动第一调节组件4和第二调节组件5的一个活动端随其移动,最终呈现为一共六个喷头7分别处于支撑框架1的两端,喷头7与现有的输药机构连接,通过六个分别位于支撑框架1两侧的喷头7对无人机航线两侧植物进行喷药;
步骤四、当需要进行精确的角度喷射式,通过两个角度调节机构6对其输出端内的喷头7角度进行调节,两个在角度调节机构6调节角度后的喷头7对植物进行精确喷药;
步骤五、当植物的分布情况比较平均时,两个模块带动机构3无需工作,通过位置锁死机构8对第一调节组件4和第二调节组件5的两个活动端位置进行固定,水平调节机构2的输出端通过两个模块带动机构3带动两个角度调节机构6互相远离,两个角度调节机构6的输出端内的喷头7随其移动,最终呈现为两个喷头7位于支撑框架1的两端,四个喷头7集中在支撑框架1的中部,通过分散开来的角度调节机构6个喷头7对植物进行喷药;
步骤六、当植物的分布集中在无人机航线的中部时,六个喷头7维持两队三列队形进行作业。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
- 一种用于林业的对靶喷药无人机
- 一种用于林业的喷药无人机