一种提高低慢小目标搜索雷达空域覆盖的方法
文献发布时间:2023-06-19 10:54:12
技术领域
本发明涉及一种雷达技术,特别是一种提高低慢小目标搜索雷达空域覆盖的方法。
背景技术
搜索雷达又称搜索预警雷达,是一种经典且应用场景广泛的雷达。搜索雷达通常在方位维采用机械转台实现360°扫描。随着相控阵技术的发展和日益成熟,先进的搜索雷达大多采用相控阵体制。相控阵雷达与传统的机扫雷达相比其波束扫描速度更快的优点,但同时需要进行设计合理的工作流程。在相控阵雷达资源管理中,数据率是反映雷达系统性能的重要指标,既体现相控阵雷达一些指标间的关系,也是时间资源管理的重要内容之一。由于低慢小目标自身特性,使得雷达搜索工作任务的重要性愈加显现。
“低慢小”目标是“低空慢速小型目标”的简称。通常把飞行高度不超过1000m,飞行速度不超过50m/s且雷达反射截面积小于两平方的目标视作低慢小目标。近些年来,低慢小目标数量快速增长并广泛应用于军事、民用的各个领域,在带来了诸多便利同时也带来了诸多安全威胁,如“黑飞”,失控或者恶意侦察、攻击等。低慢小目标可能会对以下场景产生较大安全威胁,1)机场跑道,2)监狱、电站、油田等危险区域,3)火车站、广场、运动馆等人群密集场所。低慢小目标飞行距离近、高度低、速度慢、雷达反射截面积小的特点使传统的搜索雷达探测效果显著变差。因为传统搜索雷达探测范围存在较大的近程盲区所以对近距离运动的无人机探测无力。因为无人机飞行高度低、速度慢且雷达截面积小所以很容易被强地杂波掩盖。
发明内容
本发明的目的在于提供一种提高低慢小目标搜索雷达空域覆盖的方法,包括以下步骤:
步骤S1,在俯仰维度上将搜索低慢小目标空域划分为不同区域;
步骤S2,对不同区域的发射波束进行不同半功率波束宽度的宽波束赋形,并根据波形赋形得到投影系数以及对应的激励矩阵;
步骤S3,对不同区域的接收波束进行不同波束宽度的和-差波束混合赋形;
步骤S4,定各区域内波束个数,在俯仰维按照半功率宽度方向图进行交叠,在方位维按照交错波束排列方式确定所有波束位置。
进一步地,步骤S1中将搜索低慢小目标空域划分为低仰角区域、中仰角区域和高仰角区域;其中
俯仰角小于10°的为低仰角区域,
俯仰角位于10°~20°之间的为中仰角区域,
俯仰角大于20°的为高仰角区域。
进一步地,步骤S2中,对于高仰角区域发射波束采用半功率宽度较大的宽波束赋形,对于中仰角区域和低仰角区域发射波束采用半功率宽度较小的宽波束赋形.
进一步地,步骤S3中,对高仰角区域接收波束赋形采用和-差波束混合赋形,对于中仰角区域接收波束赋形采用半功率宽度较小的宽波束赋形;对于低仰角区域接收波束赋形采用全通道均匀加权的波束赋形。
本发明与现有技术相比,具有以下优点:(1)高仰角下接收波束采用和波束、差波束混合赋形;(2)根据波束赋形与编排策略不同而自适应的雷达信号处理流程设计。
下面结合说明书附图对本发明作进一步描述。
附图说明
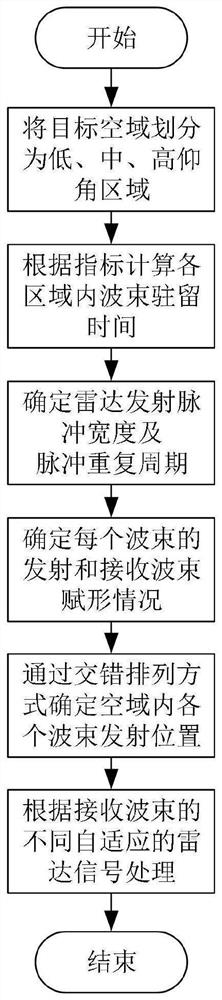
图1为本发明实施例提供的一种可以提高低慢小目标雷达空域覆盖的方法流程示意图。
图2为本发明实施例提供的一种可以提高低慢小目标雷达空域覆盖的方法的自适应雷达信号处理流程图。
图3为本发明实施例提供的一种可以提高低慢小目标雷达空域覆盖的方法的宽波束赋形的技术流程图。
图4为本发明实施例提供的一种可以提高低慢小目标雷达空域覆盖的方法的和波束与差波束的阵列方向图。
图5为本发明实施例提供的一种可以提高低慢小目标雷达空域覆盖的方法的两种不同赋形下和波-差波束混合赋形的示意图。
图6为本发明实施例提供的一种可以提高低慢小目标雷达空域覆盖的方法的搜索空域俯仰维覆盖图。
图7为本发明实施例提供的一种可以提高低慢小目标雷达空域覆盖的方法频域脉冲压缩(PC)技术流程示意图。
图8为本发明实施例提供的一种可以提高低慢小目标雷达空域覆盖的方法动目标检测(MTD)技术流程示意图。
图9为本发明实施例提供的一种可以提高低慢小目标雷达空域覆盖的方法恒虚警检测(CFAR)技术流程示意图。
具体实施方式
结合图1,一种提高低慢小目标搜索雷达空域覆盖的方法,包括以下步骤:
步骤S100,按照仰角大小在俯仰维度上将搜索低慢小目标空域划分为低仰角区域、中仰角区域和高仰角区域;
步骤S200,根据雷达方位波束宽度Δθ、搜索数据率Δr、速度分辨率Δv确定雷达波束驻留时间T,根据搜索雷达方程确定雷达发射脉冲宽度τ,由最大不模糊距离d确定雷达发射脉冲重复周期PRT;
步骤S300,对于不同区域的发射波束进行不同半功率波束宽度的宽波束赋形,并根据波形赋形得到投影系数以及对应的激励矩阵;赋形方式为:高仰角区域发射波束采用半功率宽度较大的宽波束赋形,对于中仰角区域和低仰角区域发射波束采用半功率宽度较小的宽波束赋形;
步骤S400,对高仰角区域接收波束赋形采用和-差波束混合赋形,对于中仰角区域接收波束赋形采用半功率宽度较小的宽波束赋形;对于低仰角区域接收波束赋形采用全通道均匀加权的波束赋形;
步骤S500,确定各区域内波束个数,在俯仰维按照半功率宽度方向图进行交叠,在方位维按照交错波束排列方式确定所有波束位置。
具体的,步骤S100中对搜索低慢小目标空域在俯仰维度按照仰角大小进行划分为低仰角(<10°)、中仰角(10°~20°)和高仰角区域(>20°)。本实施例的步骤S100中,对于机相扫雷达,其方位维以一定转速匀速转动360°,俯仰维通过TR组件改变相位进而快速扫描波束。低慢小目标飞行高度通常低于1km,运动距离通常小于4km,运动速度通常小于20m/s。雷达俯仰维覆盖区域为扇形区域,因此按照10°,20°仰角划分区域为三部分,可以满足不同区域的不同波束赋形需求。
具体地,步骤S200中雷达波束驻留时间T、雷达发射脉冲宽度τ和雷达发射脉冲重复周期PRT分别为:
其中,R为威力,P
具体地,结合图2,步骤S300中对不同区域的发射波束进行不同半功率波束宽度的宽波束赋形的详细步骤为:
步骤S301,采用泰勒分布的幅度加权系数获得一组独立的高增益窄波束;
步骤S302,将目标宽波束赋形方向图在这组波束上投影,得到投影系数;
步骤S303,基于得到的投影系数对自由基波束的激励矩阵矢量叠加,得到目标宽波束赋形方向图的激励矩阵;
步骤S304,波控机使用激励矩阵控制TR组件移相从而形成最终的波束。
具体地,步骤S400中,首先相控阵雷达形成和波束与差波束原理为:
对于N(偶数)元线阵,和波束的加权系数为:
w
w
差波束的加权系数为:
w
w
w
上式中,λ为雷达工作波长,θ为雷达控制波束指向角,d为雷达天线阵列单元间距。
对高仰角区域接收波束赋形采用和-差波束混合赋形的具体过程为:
步骤S401,获取接收波束的和波束和差波束,并归一化处理;
步骤S402,将归一化的和波束和差波束交叠,以和波束峰值为中心取一定波束宽度的交叠信号。
图3中,对接收波束进行不同波束宽度的和-差波束混合赋形需要同时使用和波束与差波束的阵列方向图。图4中,将归一化的和波束与差波束交叠后,以和波束峰值为中心取3dB波束宽度的交叠曲线段,结果如图4a)、b)中的和-差曲线所示。
结合图5,步骤S500中由完成不同波束宽度波束赋形的发射波束进而确定在高中低空域配置的波束个数,一个实施例为,在俯仰维的雷达威力图中,0°~10°区域内配置两个波束,10°~20°区域内配置一个波束,20°~40°区域内配置两个波束。其中,20°~40°中配置的两个接收波束为和-差混合赋形波束。在方位维的雷达威力图中,按照经典的交错波束排列方式(0.886倍波束宽度间隔)确定所有波束位置。
结合图6,步骤S600,雷达信号处理机根据步骤S100至步骤S500的方法进行探测得到的信号进行自适应的雷达信号处理,详细步骤为:
步骤S601,在波控机的控制下,功分和差网络输出和差两路模拟射频回波信号;
步骤S602,接收机对射频信号进行模拟下变频处理至中频并在中频采样后输出和差两路数字中频回波信号;
步骤S603,信号处理机对和差两路中频信号进行数字下变频至基带后进行频域脉冲压缩处理;
步骤S604,信号处理机根据接收波束的序号来确定是仅检测和波束中的目标还是和波束与差波束的目标;
步骤S605,信号处理机对脉冲压缩输出的回波数据进行动目标检测、恒虚警检测,提取目标距离门、速度门等信息;
步骤S606,数据处理机同时处理信号处理机上报的和差两路回波数据中目标数,
输出目标运动轨迹、目标实测距离、速度、高度等运动信息。
结合图7,步骤S603中,频域脉冲压缩处理的工作原理为,首先对数字IQ路回波信号进行N(相参积累点数)点离散傅里叶变换,然后与频域上的匹配滤波器系数复乘,最后对乘积结果进行N点逆离散傅里叶变换。
结合图8,步骤S605中,动目标检测的工作原理为,首先对脉冲压缩输出的距离-时间二维数据矩阵进行重排,然后在时间维上进行切比雪夫窗函数加权,最后在时间维上进行N点离散傅里叶变换,输出距离-多普勒二维数据矩阵。
结合图9,步骤S605中,恒虚警检测处理的工作原理为,首先对距离-多普勒二维数据矩阵进行数据重排,然后对目标单元两侧的参考单元求平均值和比较后取大,然后与设置的门限因子相乘后作为判别门限,将目标单元幅度与判决门限比较,最后将超过门限的点迹信息输出,完成恒虚警检测。
- 一种提高低慢小目标搜索雷达空域覆盖的方法
- 一种用于低空空域低小慢飞行器目标个体识别的特征提取方法