一种矢量偏航机构以及包含其的平流层飞艇
文献发布时间:2023-06-19 10:55:46
技术领域
本发明属于飞艇动力驱动技术领域,具体涉及一种矢量偏航机构以及包含其的平流层飞艇。
背景技术
偏航机构具有机械设计结构多变、功能环境适应性强等优点,具有广阔的应用领域。一般的偏航机构主要用于风力发电领域,通过齿轮传动和液压控制的方式实现其功能,导致其体积庞大,重量超标,机械结构复杂,无法适用于限定结构重量的动力驱动领域。在飞艇的动力驱动技术领域,尚未发现有类似的偏航机构。
因此,亟需一种新型结构的偏航机构。
在所述背景技术部分公开的上述信息仅用于加强对本发明的背景的理解,因此它可以包括不构成对本领域普通技术人员已知的现有技术的信息。
发明内容
本发明提供一种矢量偏航机构以及包含其的平流层飞艇,进而至少在一定程度上克服由于现有技术的限制和缺陷而导致的一个或者多个问题。
本发明的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本发明的实践而习得。
根据本发明的第一方面,公开一种矢量偏航机构,其特征在于,包括:底板、圆弧导轨、滑块、工字钢、蜗杆安装座、电机安装座、蜗轮、蜗杆、伺服电机、联轴器、主推电机支架和驱动器燕尾支架;
圆弧导轨固定在底板上表面;
所述滑块设置于圆弧导轨之上,所述工字钢位于所述滑块上方;所述主推电机支架设置于工字钢之上;
所述蜗杆安装座和所述电机安装座设置于底板上表面的安装孔位;
所述蜗杆安装座设置有所述蜗杆安装孔位,所述蜗杆穿过所述蜗杆安装座安装孔位轴线,进而实现与所述蜗杆安装座固定;
所述蜗杆一端通过所述联轴器与所述伺服电机输出轴固定连接;
所述蜗轮固定于主推电机支架的圆柱凸台下表面。
根据本发明的一示例实施方式,圆弧导轨通过底板上表面安装孔位与底板固定。
根据本发明的一示例实施方式,所述底板上表面设有定位环,圆弧导轨通过底板上表面定位环可靠定位。
根据本发明的一示例实施方式,所述的伺服电机转动带动蜗杆、蜗轮转动,从而带动与蜗轮固连的主推电机支架圆周转动。
根据本发明的一示例实施方式,所述蜗杆与蜗轮啮合。
根据本发明的一示例实施方式,所述的圆弧导轨固定于底板上表面,滑块与圆弧导轨滑动连接以在圆弧导轨上圆周滑动。
根据本发明的一示例实施方式,所述圆弧导轨的一部分嵌套在滑块内。
根据本发明的一示例实施方式,所述主推电机支架上表面设置有两排共八个凸块,所述凸块上表面设置有主推电机安装孔位,主推电机通过所述主推电机安装孔位,进而实现与所述主推电机支架的固定连接。
根据本发明的一示例实施方式,所述驱动器燕尾支架两边设置四个角铁,所述角铁设置有驱动器安装孔位,驱动器通过所述角铁安装孔位,进而实现与驱动器燕尾支架固定连接。
根据本发明的一示例实施方式,所述的主推电机支架下表面设置有工字钢安装孔位,通过所述安装孔位与工字钢固定。
根据本发明的一示例实施方式,所述的主推电机支架的圆柱凸台和底板上表面定位环同轴心。
根据本发明的第二方面,公开一种平流层飞艇,其特征在于,包括任一前述的矢量偏航机构。
根据本发明的一示例实施方式,所述平流层飞艇为硬式平流层飞艇。
根据本发明的一示例实施方式,所述平流层飞艇为软式平流层飞艇。
本发明的有益效果是:
1.本发明的矢量偏航机构通过蜗轮蜗杆传动和圆弧导轨、滑块转动实现偏航转动,是一种全新的偏航形式,能耗低。
2.本发明具有重量轻,结构紧凑,可靠性高的特点,适合作为实现飞行器偏航运动的动力系统。
3.本发明底板上表面设有圆弧导轨定位环,同心度高,具有安装方便,定位可靠优点。
4.本发明采用滑块镶嵌滑动连接圆弧导轨定位环减少了涡轮的轴向窜动。
5.本发明加大了涡轮直径减小了由于涡轮蜗杆副间隙引起的涡轮的周向摆动幅度。
附图说明
通过参照附图详细描述其示例实施例,本发明的上述和其它目标、特征及优点将变得更加显而易见。
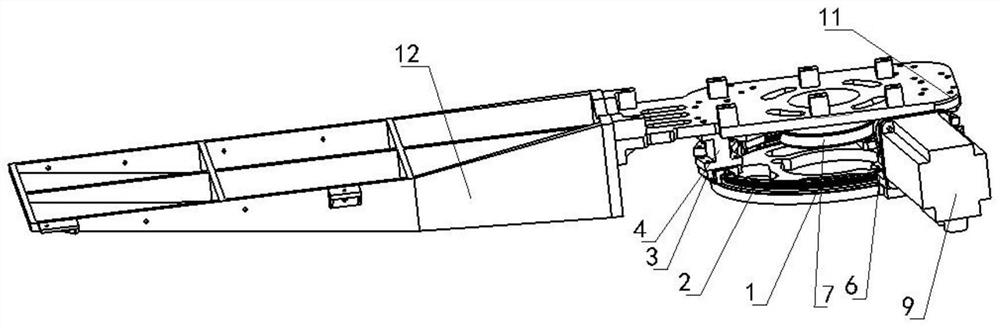
图1示出本发明的结构示意图。
图2示出本发明的底板上表面部件安装示意图。
图3示出本发明传动原理示意图。
图4示出本发明底板示意图。
图中:1为底板;2为圆弧导轨;3为滑块;4为工字钢;5为蜗杆安装座;6为电机安装座;7为蜗轮;8为蜗杆;9为伺服电机;10为联轴器;11为主推电机支架;12为驱动器燕尾支架。
具体实施方式
现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的范例;相反,提供这些实施方式使得本发明的描述将更加全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。附图仅为本发明的示意性图解,并非一定是按比例绘制。
此外,所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多实施方式中。在下面的描述中,提供许多具体细节从而给出对本发明的实施方式的充分理解。然而,本领域技术人员将意识到,可以实践本发明的技术方案而省略所述特定细节中的一个或更多,或者可以采用其它的方法、组元、步骤等。在其它情况下,不详细示出或描述公知结构、方法、实现或者操作以避免喧宾夺主而使得本发明的各方面变得模糊。
本发明要解决的技术问题是提供一种矢量偏航机构,这种机构可以在-70℃~55℃之间,强震动、大载荷恶劣环境条件下,实现一定范围的稳定的偏航功能。
本发明要解决的技术问题由以下结构来实现:一种矢量偏航机构,包括底板、圆弧导轨、滑块、工字钢、蜗杆安装座、电机安装座、蜗轮、蜗杆、伺服电机、联轴器、主推电机支架和驱动器燕尾支架。
本发明技术方案是:通过上位机向驱动器,伺服电机发送指令,确定其转动的角度和方向,伺服电机接受指令后,伺服电机输出轴带动蜗杆转动,蜗杆通过与蜗轮的啮合区域带动蜗轮转动,蜗轮与主推电机支架固定连接,主推电机支架通过工字钢与滑块固定连接,滑块和圆弧导轨嵌套连接,进而使蜗轮转动时带动滑块在圆形导轨上往复圆周运动,实现机构的偏航功能。
本发明加大了涡轮直径,使由于涡轮蜗杆副间隙引起的涡轮周向摆动幅度减小。
进一步的所述的底板上表面设置圆弧导轨、且通过底板上表面的定位环可靠定位;圆弧导轨、蜗杆安装座和电机安装座通过底板安装孔位固定,进而实现底板与圆弧导轨、蜗杆安装座和电机安装座的固定连接。
进一步的滑块位于圆弧导轨上方,与所述圆弧导轨嵌套滑动连接,实现圆周转动;滑块顶部设置工字钢安装孔位。减少了由于螺旋桨的动不平衡造成的涡轮轴向窜动。
优选的,圆弧导轨和滑块均为THK型号。
进一步的工字钢位于滑块上方,工字钢通过滑块顶部设置的安装孔位与滑块固定连接。
进一步的主推电机支架位于工字钢上方,主推电机支架下表面设置有安装孔位,进而实现主推电机支架与工字钢之间的固定连接。
进一步的电机安装座设置有伺服电机安装孔位,伺服电机输出轴穿过电机安装座安装孔位轴线,进而实现伺服电机与电机安装座的固定连接。
进一步的蜗杆安装座设置有蜗杆安装孔位,蜗杆穿过蜗杆安装座安装孔位轴线,进而实现与蜗杆安装座的固定;蜗杆一端通过联轴器与伺服电机输出轴固定连接。
进一步的所述主推电机支架尾部设置有安装孔位,所述驱动器燕尾支架通过所述主推电机支架安装孔位,进而实现所述驱动器燕尾支架与所述主推电机安装孔位的固定连接。
进一步的所述主推电机支架上表面设置有两排共八个凸块,凸块上表面设置有主推电机安装孔位,所述主推电机通过所述主推电机安装孔位,进而实现与所述主推电机支架的固定连接
进一步的矢量偏航机构所接受的指令来自伺服电机上位机控制软件。通过指令可以实现矢量偏航机构在±45°范围内的圆周往复运转。当指令停止时,伺服电机输出轴停止转动,蜗轮蜗杆传动机构啮合停止,实现停机,且具有自锁功能。
进一步的矢量偏航机构具有限位功能。每次开机时,需要先回到零位,触碰零位开关,当运动到最大角度时,触碰限位开关。
下面结合附图和具体实施例对本发明的技术方案进一步说明。
根据本发明的第一种实施方式,公开一种矢量偏航机构,如图1-4所示,包括:底板1、圆弧导轨2、滑块3、工字钢4、蜗杆安装座5、电机安装座6、蜗轮7、蜗杆8、伺服电机9、联轴器10、主推电机支架11和驱动器燕尾支架12;
所述底板1上表面设置有定位环,圆弧导轨2通过底板1上表面定位环可靠定位在底板1上表面,并通过底板1上表面安装孔位固定;
所述滑块3设置于圆弧导轨2之上,所述工字钢4位于所述滑块3上方;所述主推电机支架11设置与工字钢4之上;
所述蜗杆安装座5和所述电机安装座6设置于底板1上表面的安装孔位;
所述蜗杆安装座5设置有所述蜗杆8安装孔位,所述蜗杆8穿过所述蜗杆安装座5安装孔位轴线,进而实现与所述蜗杆安装座5固定;
所述蜗杆8一端通过所述联轴器10与所述伺服电机9输出轴固定连接;
所述蜗轮7固定于主推电机支架11的圆柱凸台下表面。
根据本发明的一示例实施方式,所述的伺服电机9转动带动蜗杆8、蜗轮7转动,从而带动与蜗轮7固连的主推电机支架11圆周转动。
根据本发明的一示例实施方式,所述的圆弧导轨2固定于底板1上表面,滑块3与圆弧导轨2滑动连接以在圆弧导轨2上圆周滑动。
根据本发明的一示例实施方式,所述主推电机支架11上表面设置有两排共八个凸块,设置有主推电机安装孔位,主推电机通过所述主推电机安装孔位,进而实现与所述主推电机支架11的固定连接。
根据本发明的一示例实施方式,所述驱动器燕尾支架12两边设置四个角铁,所述角铁设置有驱动器安装孔位,驱动器通过所述角铁安装孔位,进而实现与驱动器燕尾支架12固定连接。
根据本发明的一示例实施方式,所述的主推电机支架11下表面设置有工字钢安装孔位,通过所述安装孔位与工字钢4固定。
根据本发明的一示例实施方式,所述的主推电机支架11的圆柱凸台和底板1上表面定位环同轴心。
具体来说,本发明提供一种矢量偏航机构装置,如图1-2所示,包括底板1、圆弧导轨2、滑块3、工字钢4、蜗杆安装座5、电机安装座6、蜗轮7、蜗杆8、伺服电机9、联轴器10、主推电机支架11和驱动器燕尾支架12。
如图2、图4所示,圆弧导轨2通过底板1上表面凸出定位环实现圆周定位,并通过螺栓固定于底板1上。
如图2所示,滑块3与圆弧导轨2嵌套连接,实现圆周转动;工字钢4下表面安装孔位与滑块3上表面安装孔位通过螺栓固定。
圆弧导轨和滑块可均为THK型号,但本发明不限于此,也可以是其他类型的圆弧导轨和滑块。
如图2所示,蜗杆安装座5,电机安装座6安装孔位与底板1上表面安装孔位通过螺栓实现固定连接;伺服电机9通过螺栓与电机安装座6固定连接;蜗杆8通过轴承装于蜗杆安装座5内,蜗杆8与伺服电机9输出轴通过联轴器10连接。
如图3所示,主推电机支架11与工字钢4上表面安装孔位通过螺栓固连。
如图1所示,主推电机支架11和驱动器燕尾支架12通过螺栓固连。主推电机支架11上表面设有8个凸块用于主推电机安装固定;同理,驱动器燕尾支架12两侧设置共四个角铁,角铁设有驱动器安装孔位。
如图3所示,蜗轮7与主推电机支架11下部凸出圆台通过螺栓固连。
如图1、图3所示,本发明使用方法和工作原理是:底板1固定于飞艇尾部,驱动器获得转向指令后,伺服电机9转动,通过联轴器10带动蜗杆8转动,蜗杆蜗轮啮合,蜗轮7转动;与蜗轮7固连的主推电机支架11通过工字钢4与滑块3固定连接,滑块3和圆弧导轨2嵌套连接。进而使蜗轮7转动时带动滑块3在圆弧导轨2上圆周运动,同时带动主推电机支架11和驱动器燕尾支架12转动,从而达到实现矢量偏航功能。如图2、图3所示,本发明采用滑块3与圆弧导轨2嵌套滑动连接,减少了涡轮7的轴向窜动;本发明加大了涡轮7直径减小了由于涡轮蜗杆副间隙引起的涡轮7的周向摆动幅度。
根据本发明的第二个实施方式,公开一种平流层飞艇(未图示),其中所述平流层飞艇包含第一种实施方式的矢量偏航机构。
所述平流层飞艇为硬式平流层飞艇或软式平流层飞艇。
本发明的有益效果是:
1.本发明的矢量偏航机构通过蜗轮蜗杆传动和圆弧导轨、滑块转动实现偏航转动,是一种全新的偏航形式,能耗低。
2.本发明具有重量轻,结构紧凑,可靠性高的特点,适合作为实现飞行器偏航运动的动力系统。
3.本发明底板上表面设有圆弧导轨定位环,同心度高,具有安装方便,定位可靠优点。
4.本发明采用滑块镶嵌滑动连接圆弧导轨定位环减少了涡轮的轴向窜动。
5.本发明加大了涡轮直径减小了由于涡轮蜗杆副间隙引起的涡轮的周向摆动幅度。
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本发明的其它实施方案。本申请旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由下面的权利要求指出。
应当理解的是,本发明并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来限制。
- 一种矢量偏航机构以及包含其的平流层飞艇
- 一种矢量偏航机构以及包含其的平流层飞艇