无人机救援方法
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及无人机技术领域,尤其是涉及一种无人机救援方法。
背景技术
随着电动汽车的不断更新换代,电动汽车越来越多地成为人们的代步工具,然而,随着电动汽车的数量的逐渐增加,电动汽车的电池发生故障以及损伤的数量也就增多了,在一些拥堵、路况较差的区域,维修人员很难及时赶到从而影响用户的使用体验感。
发明内容
本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的一个目的在于提出一种无人机救援方法,所述无人机救援方法救援速度快、救援效率高。
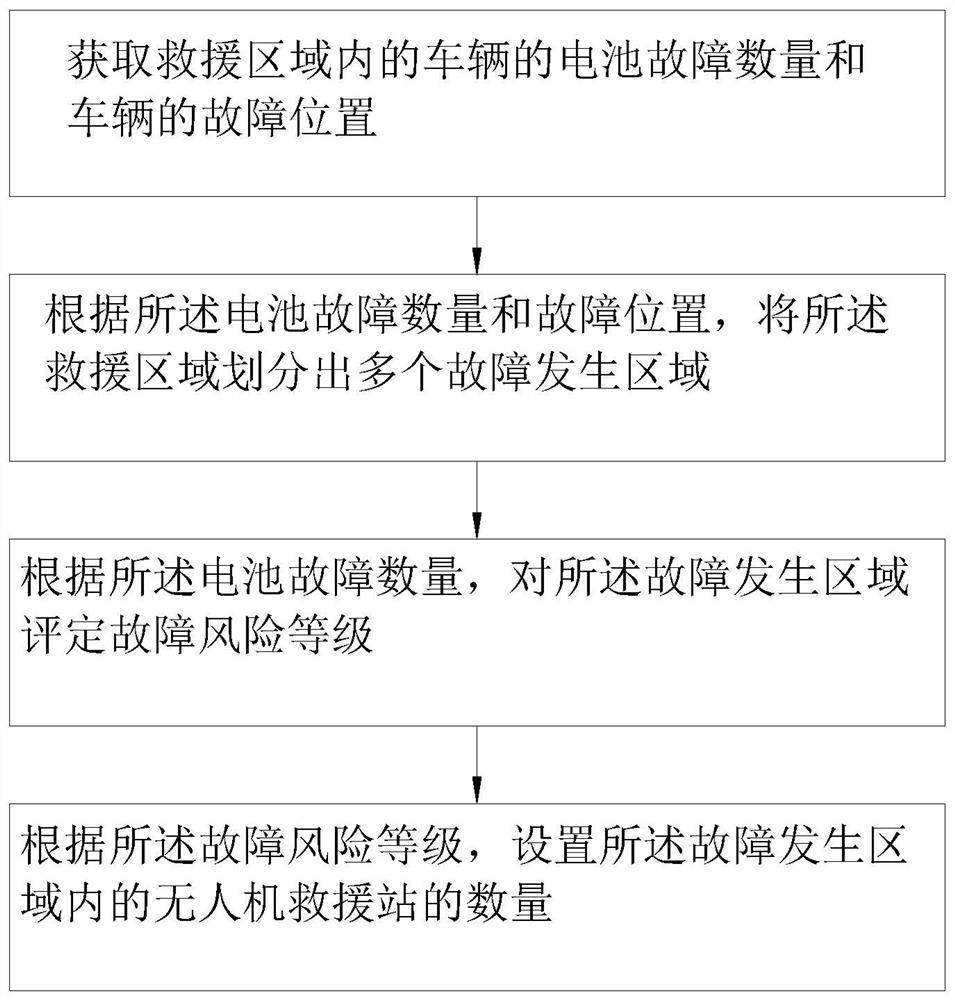
根据本发明实施例的无人机救援方法,所述无人机救援方法包括:获取救援区域内的车辆的电池故障数量和车辆的故障位置;根据所述电池故障数量和故障位置,将所述救援区域划分出多个故障发生区域;根据所述电池故障数量,对所述故障发生区域评定故障风险等级;根据所述故障风险等级,设置所述故障发生区域内的无人机救援站的数量。
根据本发明实施例的无人机救援方法,可以根据电池故障数量和故障位置划分出多个故障发生区域,这样可以较好实现无人机救援站跨越长距离救援,另外,可以根据每个故障发生区域内的电池故障数量所评定出的故障风险等级,来设置无人机救援站的数量,这可以更进一步地实现对该区域内的故障车辆进行及时地救援。
另外,根据本发明的无人机救援方法,还可以具有如下附加的技术特征:
在本发明的一些实施例中,所述无人机救援站为可移动无人机救援站,当所述故障风险等级上升时,增加所述无人机救援站的数量,当所述故障风险等级下降时,减少所述无人机救援站的数量。
在本发明的一些实施例中,根据所述故障风险等级,设置所述故障发生区域内的无人机救援站的数量,包括:以故障车辆的发生位置作为坐标点,获取相邻的两个所述坐标点的距离值,根据多个所述距离值和所述电池故障数量建立所述坐标点的密集度,根据所述密集度设置所述无人机救援站的位置以及相邻两个所述无人机救援站的间隔距离。
在本发明的一些实施例中,每个所述无人机救援站包括至少一个巡逻无人机,所述巡逻无人机适于获取所属区域内的车辆的电量信息,当所述电量信息小于第一电量值时,所述巡逻无人机适于将该车辆的车辆信息发送给所述无人机救援站。
在本发明的一些实施例中,当所述电量信息小于第二电量值时,所述巡逻无人机向该车辆示警。
在本发明的一些实施例中,当所述电量信息小于第二电量值并达到预定时间还未收到车辆回复信息时,所述巡逻无人机适于向所述无人机救援站发出报警。
在本发明的一些实施例中,当所述电量信息小于第二电量值并达到预定时间还未收到车辆回复信息时,所述巡逻无人机适于向附近的车辆发出求助信息。
在本发明的一些实施例中,所述无人机救援站适于接收车辆的求助信息,以根据所述求助信息派出功能性无人机,所述功能性无人机包括:电池故障检测无人机、维修无人机、充电无人机、送货无人机。
在本发明的一些实施例中,所述充电无人机适于携带固态电池、可拆卸电池和小型充电电池中的至少一种。
在本发明的一些实施例中,电池故障检测无人机、维修无人机、充电无人机、送货无人机中的至少一个上设有移动终端,所述移动终端适于与所述无人机救援站的云服务器通讯。
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
图1是根据本发明实施例的无人机救援方法的流程图。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
下面参考图1描述根据本发明实施例的无人机救援方法。
如图1所示,根据本发明实施例的无人机救援方法包括:首先获取救援区域内的车辆的电池故障数量和车辆的故障位置,这里,需要说明的是,车辆可以是燃油汽车的电池,也可以是充电汽车的电池,电池汽车的故障数量可以是车辆内部的检测装置进行检测后,得到检测故障的检测信息,然后将检测信息朝向无人机救援站发送电池故障信号,进一步地,车辆内还可以设有定位装置,定位装置可以朝向无人机救援站发送位置信号,以便无人机救援站朝向车辆进行救援。
进一步地,根据所述电池故障数量和故障位置,将所述救援区域划分出多个故障发生区域,在一个示例中,无人机救援站可以根据电池故障数量和在救援区域内的车辆发生电池故障的位置进行记录,然后根据记录的电池故障数量和故障位置,将救援区域划分出多个故障发生区域,具体地,可以根据电池故障数量,将划分出的多个故障发生区域进行故障风险等级的评定,由此,可以根据不同的故障风险等级来对不同的区域实行不同的救助方式。
在一个示例中,当对多个故障发生区域均评定出故障风险等级后,可以根据故障风险等级设置故障发生区域内的无人机救援站的数量。例如,故障风险等级高的故障发生区域,指的是其区域内电池故障数量较多,这样,如果故障发生区域内的无人机救援站的数量较少的话,可能发生救援不及时的问题,从而影响救援,因此,在一个具体示例中,故障风险等级越高的故障发生区域内,无人机救援站的数量就越多,故障风险等级越低的故障发生区域内,无人机救援站的数量就越少。
另外,在一个示例中,每个故障发生区域的面积可以不相同。这里可以理解的是,在救援区域内,电池故障位置可能集中在某一小片区域,或者在某几个电池故障位置,发生的电池故障数量较多,那么可以以电池故障位置的集中区域或者电池故障数量进行综合判断,来划定处故障发生区域,从而方便救援。
由此,根据本发明实施例的无人机救援方法,可以根据电池故障数量和故障位置划分出多个故障发生区域,这样可以较好实现无人机救援站跨越长距离救援,另外,可以根据每个故障发生区域内的电池故障数量所评定出的故障风险等级,来设置无人机救援站的数量,这可以更进一步地实现对该区域内的故障车辆进行及时地救援。
在本发明的一些实施例中,无人机救援站为可移动无人机救援站,例如,无人机救援站可以为移动救援车,移动救援车上可以搭载有多个无人机,移动救援车上还可以载有汽车维修的零部件、电负重较轻的电池相关零部件、汽车电池或者维修工具,当然,也可以是一些救援物资等。
进一步地,当故障风险等级上升时,增加无人机救援站的数量,当故障风险等级下降时,减少无人机救援站的数量。也就是说,无人机救援站或者负责调配无人机救援站的救援中心可以实时对救援区域内的电池故障数量和故障位置进行检测以及汇总,从而不断地对每个救援区域内的故障风险等级进行评定,当故障风险等级上升时,增加无人机救援站的数量,当故障风险等级下降时,减少无人机救援站的数量,由此,可以合理地对无人机救援站进行布置,从而使得无人机救援站可以更好地适应不断变化的救援状态。
在一些示例中,影响故障风险等级的因素可以是道路的平整度、救援区域内的道路状态(道路状态包含拥堵、塔防、能见度低等情况,正常的维修救援车辆无法准时及时现场维修)以及易发生事故的路段等,影响故障风险等级的因素还可以是在救援区域内的环境、季节等因素,这里不作限制。
在本发明的一些实施例中,根据故障风险等级,设置故障发生区域内的无人机救援站的数量包括:以故障车辆的发生位置作为坐标点,获取相邻的两个坐标点的距离值,根据多个距离值和电池故障数量建立坐标点的密集度,根据密集度设置无人机救援站的位置以及相邻两个无人机救援站的间隔距离。例如:在风险相同或相近的地区,将其投影至2D平面,以故障车辆的发生位置作为坐标点,连接成不规则一条线之后,尽量取距离各个地点距离相同或相近的地位,设置总站,以调配无人机资源,作为无人机的电能的补给站;同时,总站还包含救援物资的集中存放点等重要资源的调度中心。
在一个示例中,故障发生区域内有四辆车发生了电池故障,此时以这四辆车的位置作为坐标点,依次连接着四辆车的坐标点,以构成一个不规则的四边形,以该四边形的对角线作为无人机救援站的设置位置线,以第一预定距离作为无人机救援站的间隔距离。在一个具体示例中,第一预定距离可以作为两个无人机的最远救援距离。
在另一个示例中,故障发生区域内有四辆车发生了电池故障,此时以这四辆车的位置作为坐标点,依次连接着四辆车的坐标点,以构成一个不规则的四边形,以该四边形的对角线的交点作为一个无人机救援站的位置,其他位置处的无人机救援站也可以根据第二预定距离内的四辆车的位置作为坐标点,依次连接着四辆车的坐标点,以构成一个不规则的四边形,以该四边形的对角线的交点作为另一个无人机救援站的位置,需要说明的是,两个无人机救援站的间隔距离不大于第一预定距离。
还有的示例中,若故障发生区域内的电池故障数量大于第一预定数量时,根据此区域内的密集度,在密集度高的区域多设置无人机救援站,在密集度低的区域设置少的无人机救援站。
在本发明的一些实施例中,每个无人机救援站包括至少一个巡逻无人机,巡逻无人机适于获取所属区域内的车辆的电量信息,当电量信息小于第一电量值时,巡逻无人机适于将该车辆的车辆信息发送给无人机救援站。由此,可以方便无人机救援站进行信息的记录,以使得无人机救援站进行救援准备,这样即可以提高救援效率,也可以较好地对车辆的电池进行风险等级评估。
这里,巡逻无人机可以在有规律地在所属区域内飞行,例如每三十分钟飞行巡逻一次,或者每两个小时飞行巡逻一次,可选地,巡逻无人机也可以设有多个,多个无人机可以交替飞行巡逻。
在一些实施例中,当电量信息小于第二电量值时,巡逻无人机向该车辆示警,由此,可以提醒车辆司机,电池没电了,以便司机即使发送救援需求。此时,处于准备阶段的无人机可以较为快速地进行救援。
更进一步地,当电量信息小于第二电量值并达到预定时间还未收到车辆回复信息时,巡逻无人机适于向无人机救援站发出报警。
在一个具体地示例中,车辆的电池发生故障,此时,电池故障发生在第一故障阶段,此阶段的电池还可以继续使用,但出现了一定的故障,车辆可以将第一故障阶段的故障信息发送给巡逻无人机,此时无人机救援站进行救援准备工作。当电池故障由第一故障阶段进入到第二故障阶段时,此阶段的电池处于较危险的阶段,车辆可以将第二故障阶段的故障信息发送给巡逻无人机(当电池故障在第一故障阶段时,巡逻无人机可以对该车辆进行重点标记,以便跟踪),巡逻无人机可以朝向司机发送预警信息,预警信息可以通过无人机的音响设备箱司机播报。
当第二故障阶段持续预定时间还未收到车辆回复信息,或者说第二故障阶段持续预定时间还未收到司机回复信息时,巡逻无人机适于想无人机救援站发出报警,以便及时地对车辆进行救援,这里,可以等待无人机救援站确认司机或者车辆人员的情况再进行是否进行进一步地救助,这里进一步的救助包括拨打110或者拨打120。
在本发明的一些实施例中,当电量信息小于第二电量值并达到预定时间还未收到车辆回复信息时,巡逻无人机适于向附近的车辆发出求助信息。这样,如果附近的车辆回复了可以进行救援,则可以减少无人机救援站的救援压力,同时,也可以更加快速有效地对事故车辆进行救援。
在本发明的一些实施例中,无人机救援站适于接收车辆的求助信息,以根据求助信息派出功能性无人机,功能性无人机包括:电池故障检测无人机、维修无人机、充电无人机、送货无人机。
这里需要说明的是,车辆的电池检测装置可以仅用于对电池进行大致检测,电池故障检测无人机可以更进一步地对电池进行检测,以判断此时是否可以进行维修,或者是否需要直接更换电池。
维修无人机可以对电池进行维修,也可以指导司机进行维修。
充电无人机可以对电池进行充电。
送货无人机可以是当用户忘记拿卡一类的小型物品,然后朝向无人机救援站发送送货请求,送货无人机可以根据用户需求飞行至指定位置去接货,然后将该货物运送给用户,或者将用户手中的指定物品运送至指定位置。
这里,可以理解的是,当用户发送救助请求时,巡逻无人机朝向附近的车辆发送救助请求,附近的车辆可以请求送货无人机将物品送想发出求助的车辆。这样,可以避免耽误附近车辆的行程。
在一些示例中,充电无人机适于携带固态电池、可拆卸电池和小型充电电池中的至少一种,由此,可以根据需求对汽车电池进行充电或者更换电池。
在本发明的一些实施例中,电池故障检测无人机、维修无人机、充电无人机、送货无人机中的至少一个上设有移动终端,移动终端适于与无人机救援站的云服务器通讯,由此,可以更加灵活地根据实际需求进行求助或者进行救助。
根据本发明实施例的无人机救援方法的其他构成以及操作对于本领域普通技术人员而言都是已知的,这里不再详细描述。
在本说明书的描述中,参考术语“一些实施例”、“可选地”、“进一步地”或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
- 救援无人机、救援无人机群及其调控消防系统
- 无人机救援方法、装置、介质、云端服务器及救援系统