一种无人机
文献发布时间:2023-06-19 11:03:41
技术领域
本发明实施例涉及无人机设计技术领域,特别是涉及一种无人机。
背景技术
无人机是利用无线电遥控设备或自备的程序控制装置操纵的不载人飞行器,目前无人机应用广泛,在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域都应用良好。目前市场上的四旋翼消费无人机,在启动飞行时,需经过以下步骤:装上电池,四个机臂逐一手动张开,开机,飞行,最后关机。
但是,本发明的发明人在实现本发明的过程中,发现:在启用四旋翼消费无人机时,四旋翼消费无人机的机臂需要通过人工手动打开,影响用户体验,非常不方便。
发明内容
鉴于上述问题,本发明实施例提供了一种无人机,克服了上述问题或者至少部分地解决了上述问题。
根据本发明实施例的一个方面,提供了一种无人机,包括机身、机臂、推动组件和从动组件。机身设置有电池腔以及连通所述电池腔的开口;机臂转动设置于所述机身;推动组件设置于所述电池;从动组件设置于所述机身,所述从动组件与所述机臂连接;其中,在将所述电池从所述开口推进所述电池腔内过程中,所述推动组件带动所述从动组件运动,以使所述从动组件带动所述机臂相对于所述机身张开,在所述电池从所述电池腔内取出过程中,所述推动组件带动所述从动组件回转,以使所述从动组件带动所述机臂折叠于所述机身。
在一种可选的方式中,所述无人机包括锁定机构,所述锁定机构设置于所述机身,所述锁定机构用于在所述电池收容于所述电池腔时对所述电池进行锁定,限定所述从动组件回转。
在一种可选的方式中,所述机臂包括第一左机臂、第二左机臂、第一右机臂和第二右机臂;所述第一左机臂和第二左机臂转动设置于机身的一侧,所述第一右机臂和第二右机臂转动设置于所述机身的另一侧;所述从动组件包括第一左齿轮、第二左齿轮、第一右齿轮和第二右齿轮,所述第一左齿轮固定于所述第一左机臂的一端,所述第二左齿轮固定于所述第二左机臂的一端,所述第一右齿轮固定于所述第一右机臂的一端,所述第二右齿轮固定于所述第二右机臂的一端;在将所述电池从所述开口推进所述电池腔内过程中,所述推动组件与第一左齿轮、第二左齿轮、第一右齿轮和第二右齿轮传动连接,并且驱动所述第一左齿轮、第二左齿轮、第一右齿轮和第二右齿轮运动,从而带动带动所述第一左机臂、第二左机臂、第一右机臂和第二右机臂相对于所述机身张开;在所述电池从所述电池腔内取出过程中,所述推动组件带动所述第一左齿轮、第二左齿轮、第一右齿轮和第二右齿轮回转,从而带动所述第一左机臂、第二左机臂、第一右机臂和第二右机臂折叠于所述机身。
在一种可选的方式中,所述从动组件还包括第一中间齿轮和第二中间齿轮;所述第一中间齿轮转动设置于所述机身的一侧,所述第一中间齿轮均与第一左齿轮和第二左齿轮传动连接,所述第二中间齿轮转动设置于所述机身的另一侧,所述第二中间齿轮均与第一右齿轮和第二右齿轮传动连接;在将所述电池从所述开口推进所述电池腔内过程中,所述推动组件与第一中间齿轮和第二中间齿轮啮合,并且带动所述第一中间齿轮和第二中间齿轮转动,所述第一中间齿轮分别驱动第一左齿轮和第二左齿轮转动,所述第二中间齿轮分别带动第一右齿轮和第二右齿轮转动。
在一种可选的方式中,所述从动组件还包括第一左连接齿轮;所述第一左连接齿轮转动设置于所述机身的一侧,所述第一左连接齿轮分别与第一中间齿轮和第二左齿轮啮合。
在一种可选的方式中,所述从动组件还包括第一右连接齿轮;所述第一右连接齿轮转动设置于所述机身的另一侧,所述第一右连接齿轮分别与第二中间齿轮和第二右齿轮啮合。
在一种可选的方式中,所述机身的一侧设置有连通电池腔的左通孔,所述机身的另一侧设置有连通电池腔的右通孔,所述第一中间齿轮位于所述左通孔,所述第二中间齿轮位于所述右通孔。
在一种可选的方式中,所述推动组件包括第一推动齿轮和第二推动齿轮,所述第一推动齿轮和第二推动齿轮分别固定设置于所述电池的两侧;所述第一推动齿轮用于带动所述第一中间齿轮转动,所述第二推动齿轮用于带动所述第二中间齿轮转动。
在一种可选的方式中,所述推动组件包括第一齿条和第二齿条,所述第一齿条和第二齿条分别固定设置于所述电池的两侧;所述第一齿条用于带动所述第一中间齿轮转动,所述第二齿条用于带动所述第二中间齿轮转动。
在一种可选的方式中,所述机身设置有收容槽,所述机臂折叠时收容于所述收容槽内。
本发明实施例的有益效果是:区别于现有技术的情况,本发明实施例设置有机身、机臂、电池、推动组件和从动组件,其中机身设置有电池腔以及连通电池腔的开口,机臂转动设置于机身,推动组件设置电池,从动组件设置于机身,从动组件与机臂连接,这样设置,在将电池从开口推进电池腔内过程中,推动组件带动从动组件运动,以使从动组件带动机臂相对于机身张开,在电池从电池腔内取出过程中,推动组件带动从动组件回转,以使从动组件带动机臂折叠于机身,用户不需要通过人工手动打开机臂,用户体验较好,非常方便。
附图说明
为了更清楚地说明本发明具体实施例或现有技术中的技术方案,下面将对具体实施例或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
图1是本发明实施例无人机的外部结构示意图;
图2是本发明无人机的一实施例的电池腔内的内部结构示意图;
图3是本发明无人机的又一实施例的电池腔内的内部结构示意图;
图4是本发明无人机的另一实施例的电池腔内的内部结构示意图。
附图说明:10、机身;101、电池腔;101a、开口;20、机臂;201、第一左机臂;202、第二左机臂;203、第一右机臂;204、第二右机臂;30、电池;40、推动组件;401、第一齿条;402、第二齿条;50、从动组件;501、第一左齿轮;502、第二左齿轮;503、第一右齿轮;504、第二右齿轮;505、第一中间齿轮;506、第二中间齿轮;507、第一左连接齿轮;508、第一右连接齿轮;60、锁定机构;601、滑动块;602、第二弹性件;70、第一弹性件。
具体实施方式
为了便于理解本发明,下面结合附图和具体实施例,对本发明进行更详细的说明。需要说明的是,当元件被表述“固定于”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。当一个元件被表述“连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
除非另有定义,本说明书所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本说明书中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本发明。本说明书所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
请参阅图1和图2,无人机01包括机身10、机臂20、电池30、推动组件40、从动组件50和锁定机构60。机臂20转动设置于机身10,推动组件40设置电池30上,从动组件50设置于机身10内,并且从动组件50与机臂20连接,锁定机构60设置于机身10。在将电池30推进机身10内时,电池30上的推动组件40带动从动组件50运动,从动组件50带动机臂20相对于机身10张开。在将电池30从机身10内取出时,推动组件40带动从动组件50回转,从动组件50带动机臂20折叠于机身10,从而实现在电池30插入机身10时,机臂20相对于机身10张开,在电池30从机身10抽出时,机臂20折叠于机身10。此处,在电池30推进机身10后,还可以通过锁定机构60将电池30锁定在机身10内。
对于上述机身10,如图1和图2所示,机身10设置有电池腔101以及连通所述电池腔101的开口101a,所述电池腔101用于放置电池30,所述开口101a方便往电池腔101内放置电池30或将电池30从电池腔101内取出。
在一些实施例中,电池腔101设置为长方体,且长宽高尺寸为115.0mm×45.0mm×45.0mm。当然,电池腔101的形状也可以为其它形状,只要电池腔101可以收容电池30,并且电池30可以自由进出电池腔101即可。
在一些实施例中,所述机身10设置有收容槽(图未示),所述收容槽用于收容折叠时的机臂20。
在一些实施例中,所述机身10的一侧设置有连通电池腔101的左通孔(未标示),所述机身10的另一侧设置有连通电池腔101的右通孔(未标示),所述左通孔和右通孔方便设置在电池30上的推动组件40与从动组件50连接。
在一些实施例中,所述电池腔101内设置有第一弹性件70,所述第一弹性件70的一端固定于所述电池腔101的底壁,第一弹性件70的另一端用于与电池101抵接。在电池30收容于电池腔101时,电池30压缩第一弹性件70,第一弹性件70对电池30提供朝开口101a方向的弹性力,在锁定机构60将电池30解锁时,第一弹性件70的弹性力可将电池30弹出,以使电池30的部分从开口101a伸出,从而方便用户将电池30从电池腔101内取出。优选的,所述第一弹性件70为弹簧。
在一些实施例中,所述电池腔101的侧壁设置滑动口(未标示),所述滑动口位于靠近所述开口101a处,所述滑动口用于安装锁定机构60。
对于上述机臂20和从动组件50,如图1和图2所示,机臂20转动设置于机身10,且机臂20与从动组件50连接,当从动组件50转动时,从动组件50可带动机臂20张开或者折叠于机身10。
具体的,所述机臂20包括第一左机臂201、第二左机臂202、第一右机臂203和第二右机臂204,所述第一左机臂201和第二左机臂202转动设置于机身10的一侧,所述第一右机臂203和第二右机臂204转动设置于所述机身10的另一侧。
而所述从动组件50包括第一左齿轮501、第二左齿轮502、第一右齿轮503和第二右齿轮504。所述第一左齿轮501固定于所述第一左机臂201的一端,所述第二左齿轮502固定于所述第二左机臂202的一端,所述第一右齿轮503固定于所述第一右机臂203的一端,所述第二右齿轮504固定于所述第二右机臂204的一端。在将电池30从开口101a推进电池腔101内过程中,推动组件40与第一左齿轮501、第二左齿轮502、第一右齿轮503和第二右齿轮504传动连接,并且推动第一左齿轮501、第二左齿轮502、第一右齿轮503和第二右齿轮504运动,从而带动第一左机臂201、第二左机臂202、第一右机臂203和第二右机臂204相对于机身10张开。在电池30从电池腔101内取出过程中,推动组件40带动第一左齿轮501、第二左齿轮502、第一右齿轮503和第二右齿轮504回转,从而带动第一左机臂201、第二左机臂202、第一右机臂203和第二右机臂204折叠。
在一些实施例中,图3所示,所述从动组件50包括第一中间齿轮505和第二中间齿轮506。所述第一中间齿轮505转动设置于所述机身10的一侧,所述第一中间齿轮505均与第一左齿轮501和第二左齿轮503传动连接,第一中间齿轮505的部分从左通孔伸入电池腔101。所述第二中间齿轮506转动设置于所述机身10的另一侧,所述第二中间齿轮506均与第一右齿轮503和第二右齿轮504传动连接,第二中间齿轮506的部分从右通孔伸入电池腔101。在将所述电池30从所述开口101a推进所述电池腔101内过程中,所述推动组件40与第一中间齿轮505和第二中间齿轮506啮合,并且带动所述第一中间齿轮505和第二中间齿轮506转动,所述第一中间齿轮505分别驱动第一左齿轮501和第二左齿轮502转动,所述第二中间齿轮506带动第一右齿轮503和第二右齿轮504转动。其中,第一中间齿轮505可使得第一左齿轮501和第二左齿轮502同时运动,即实现第一左机臂201和第二左机臂202同时张开或折叠,第二中间齿轮506可使得第一右齿轮503和第二右齿轮504同时运动,即实现第一右机臂203和第二右机臂204同时张开或折叠。
在一些实施例中,第一中间齿轮505和第二中间齿轮506的分度圆直径相等,分度圆直径为59mm,且第一中间齿轮505在电池腔101内最远齿顶到电池腔101靠近第一中间齿轮505一侧的侧壁的距离为8mm,第二中间齿轮506在电池腔101内最远齿顶到电池腔101靠近第二中间齿轮506的侧壁的距离等于8mm。
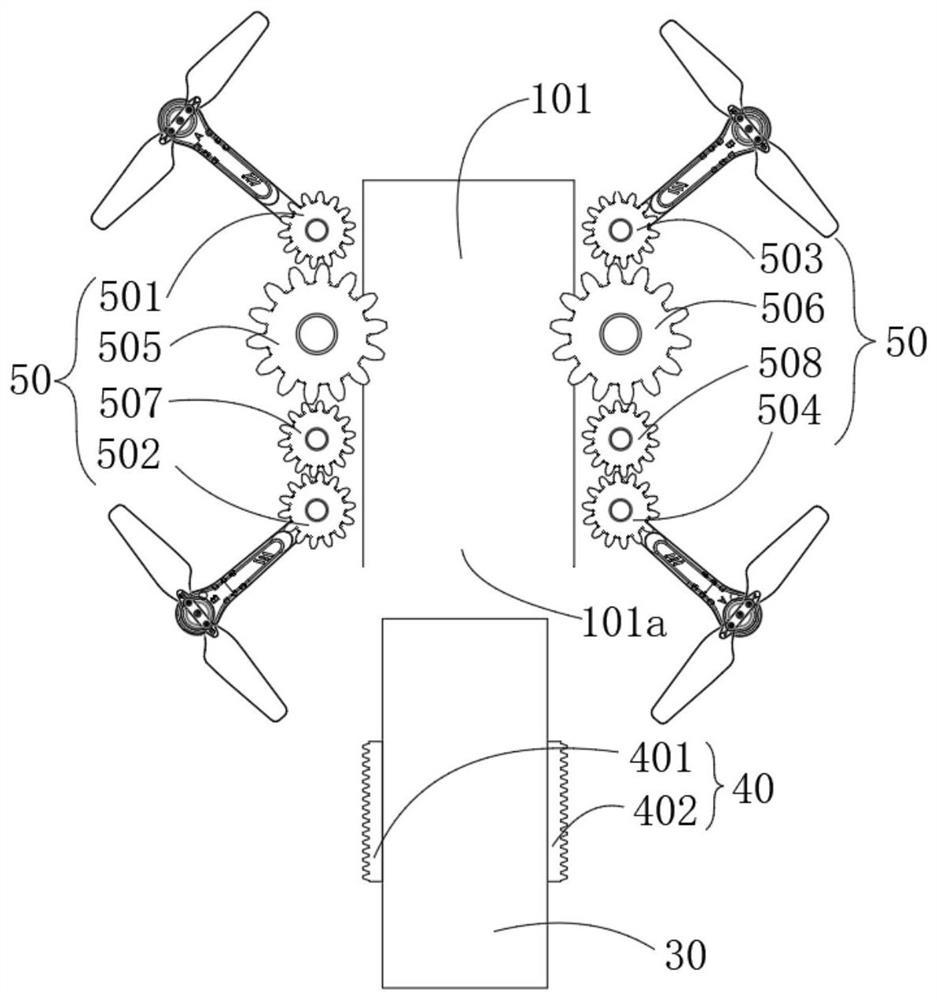
在一些实施例中,如图4所示,所述从动组件50还包括第一左连接齿轮507,所述第一左连接齿轮507转动设置于所述机身10的一侧,所述第一左连接齿轮507分别与第一中间齿轮505和第二左齿轮502啮合。在第一中间齿轮505运动时,所述第一左连接齿轮507可使得第二左齿轮502的转动方向和所述第一左齿轮501的转动方向相同,即实现第二左机臂202的转动方向和第一左机臂201的转动方向相同。
在一些实施例中,所述从动组件50还包括第一右连接齿轮508,所述第一右连接齿轮508转动设置于所述机身10的另一侧,所述第一右连接齿分别与第二中间齿轮506和第二右齿轮504啮合。在第二中间齿轮506运动时,所述第一右连接齿轮508可使得第二右齿轮504的转动方向和所述第一右齿轮503的转动方向相同,即实现第二右机臂204的转动方向和第一右机臂203的转动方向相同。
对于上述电池30和推动组件40,如图4所示,推动组件40设置于所述电池30。其中,所述电池30用于为无人机提供电能,推动组件40用于带动从动组件50运动。
在一些实施例中,电池30设计为长方体,且电池30的长宽高为115mm×45mm×45mm。
在一些实施例中,所述推动组件40包括第一推动齿轮(图未示)和第二推动齿轮(图未示),所述第一推动齿轮和第二推动齿轮分别固定设置于所述电池30的两侧。其中,所述第一推动齿轮用于带动所述第一中间齿轮505转动,所述第二推动齿轮用于带动所述第二中间齿轮506转动。
在一些实施例中,所述推动组件40包括第一齿条401和第二齿条402,所述第一齿条401和第二齿条402分别固定设置于所述电池30的两侧。其中,所述第一齿条401用于带动所述第一中间齿轮505转动,所述第二齿条402用于带动所述第二中间齿轮506转动。其中,以计算第二齿条402在电池30上的长度s为例,计算方式如下:如图1所示,设定机身10与第一右机臂203的夹角∠1=60°,则第一右机臂203折叠于机身10需要转动的角度为α=180°-∠1=120°,设定与所述第一右机臂203连接的第一右齿轮503的分度圆直径为d=28mm,则第二齿条402在电池30上的长度s=dπ*α/360°=28*120°/360°=29.3mm,且设定齿条的高度为8mm。
对于上述锁定机构60,所述锁定机构60设置于所述机身10,所述锁定机构60用于在所述电池30收容于所述电池腔101时对所述电池30进行锁定,限定所述从动组件50回转。
在一些实施例中,所述锁定机构60包括滑动块601,所述滑动块601设置于所述滑动口,且所述滑动块601可在所述滑动口滑动。当将所述电池30推进所述电池腔101内时,所述滑动块601靠近电池腔101的一端抵接电池30靠近开口101a的一端,使得电池30固定于电池腔101内,从而实现限定从动组件50的回转,降低了由于机臂20回弹造成炸机的风险。
在一些实施例中,所述锁定机构60包括第二弹性件602,所述第二弹性件602的一端固定于所述机身10,所述第二弹性件602的另一端连接于所述滑动块601,在将所述电池30推进电池腔101内时,在第二弹性件602的作用下,滑动块601可自动弹出抵接电池30靠近开口101a的一端,使得电池30固定于电池腔101内,从而实现限定从动组件50的回转。
在本发明实施例中,通过在机身10设置电池腔101以及连通电池腔101的开口101a,机臂20转动设置于机身10,推动组件40设置电池30,从动组件50设置于机身10,从动组件50与机臂20连接,这样设置,在将电池30从开口101a推进电池腔101内过程中,推动组件40带动从动组件50运动,以使从动组件50带动机臂20相对于机身10张开,在电池30从电池腔101内取出过程中,推动组件40带动从动组件50回转,以使从动组件50带动机臂20折叠于机身10,用户不需要通过人工手动打开机臂20,用户体验较好,非常方便。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
- 无人机系统、无人机、移动体、划分部件、无人机系统的控制方法和无人机系统控制程序
- 无人机系统、无人机、移动体、无人机系统的控制方法和无人机系统控制程序