具有沿每个球形方向能够旋转的防护保持架的自主飞行器
文献发布时间:2023-06-19 11:05:16
技术领域
本发明涉及一种能够沿着地面移动并且能够飞行的自主飞行器。自主飞行器最通常的是无人驾驶飞行器,但是可以有机载飞行员或乘客。
自主飞行器具有带有推进器的推力主体。推进器通常将由一个或多个转子(例如,螺旋桨或管道式风扇)提供,所述一个或多个转子由一个或多个马达提供动力。通常,每个转子由马达独立供电并且受智能微处理器控制器控制。通常,转子推进器的轴设置在自主飞行器的理论垂直轴上或与自主飞行器的理论垂直轴平行。当推进器或每个推进器所产生的推力与世界垂直方向(world vertical)对齐时,自主飞行器将垂直升起。为了产生横向推力,改变一个或多个转子的推力,以使推力主体的垂直轴倾斜、滚动或偏航。推进器可以由可替代的移动机翼推进器(例如,扑翼机)或非机翼推进器(例如,喷气式飞机或火箭)提供。
为了使得自主飞行器能够沿着标称水平表面(例如,地面)、覆盖表面(例如,天花板)移动或抵靠垂直表面(例如,墙壁)移动,自主飞行器具有围绕推力主体的大致球形的防护保持架(fender cage),该防护保持架被推力主体支撑以沿着多个球形方向,也就是与球体表面相切的方向旋转。
背景技术
尽管存在防护保持架式自主飞行器(autonomous aerial vehicle,AAV)的几个其他示例,但最接近的已知现有技术的防护保持架式AAV的示例为EP2813428和EP3024726。EP2813428提供了通过两个径向辐条连接至大体上球形保持架的推力主体,每个辐条从推力主体沿直径方向延伸。每个辐条通过第一可轴向旋转的辐条轴承连接至内万向节环,以使得内万向节环能够绕第一辐条轴旋转。外万向节环通过旋转外万向节环轴承在与辐条轴承周向(90度)间隔的位置处与内万向节环连接。这使得外万向节环绕内万向节环在与辐条轴成90度的旋转轴上旋转。大体上球形的防护保持架通过旋转保持架轴承连接至外万向节环,旋转保持架轴承与外万向节环轴承等间距设置,使得防护保持架围绕推力主体在由相互垂直的万向节环固定的三个轴中的任何一个或每一轴上旋转。因此,如果防护保持架撞击到诸如地面之类的另一对象上,则所引起的防护保持架的任何旋转通常都不会传递给推力主体。防护保持架因此使得自主飞行器能够沿表面以受控方式移动,并且该表面被保护以免受转子的冲击,反之亦然。在EP2813428中所示出的第一实施例中,防护保持架由刚性地连接在一起的三个相互垂直的万向节环制成。第二实施例示出了由具有相似长度的刚性梁形成的防护保持架,刚性梁连接成围绕五边形的六边形,以形成富勒球。
EP2813428的自主飞行器的问题是防护保持架体积大,在防护保持架包围了能够承载较大有效载荷的较大推力主体的情况下尤其如此。这使得运输自主飞行器成为一种挑战,并且可能使自主飞行器的防护保持架在运输过程中更容易损坏。防护保持架使接近推力主体变得困难,特别是在使用富勒球结构的情况下,使得有效载荷或电池组的更换或充电变得困难。
EP2813428和EP3024726的自主飞行器的另一缺点是万向节环和相关轴承增加了自主飞行器的重量,对有效载荷和耐久性产生不利影响。EP2813428和EP3024726的自主飞行器的另一缺点是万向节环和轴承增加了部件的数量,因此增加了自主飞行器的组装步骤的数量和后续成本。
万向节环、轴承和辐条的接合处相对容易受到损坏和污染。
所有万向装置共有的另一技术问题被称为万向节死锁(gimbal lock)。如果两个或多个旋转轴对齐,则会发生万向节死锁,实际上将可用的旋转轴从两个减少到一个。如果防护保持架受到与可用旋转轴不相切的力,则防护保持架无法隔离升力体(lifting body)并且该力将被传递给升力体。
发明内容
根据本发明的第一方面,提供了一种自主飞行器,自主飞行器具有:
推力主体;
辐条,从推力主体径向延伸,以在距离推力主体的公共半径处展开由推力(thrust)轴承提供的凸球形支承表面;以及
防护保持架,具有球形内支承表面,球形内支承表面的半径等于公共半径,由此防护保持架通过推力轴承与防护保持架的内表面之间的接合而得以支撑,防护保持架距离推力主体固定距离,防护保持架可围绕推力主体沿着每个球形方向自由旋转。
出于本说明书的目的,术语“球形方向”是指与球表面相切的任何方向。
防护保持架由多个细长构件或中空球形结构提供,细长构件成形为包围球形表面,从而留下大量用于空气流通的通道,中空球形结构被多个通道穿孔以使得能够最小程度地抑制气流。推力轴承具有球形支承表面,该球形支承表面横跨通道,以在防护保持架的每种构造中与防护保持架的内支承表面接合。因此,推力轴承不会落入或挡在与防护保持架的任何接合点上。与万向系统不同的是,不可能有两个或多个旋转轴对齐,因此万向节死锁是不可能的。
为了便于组装、拆卸和维护,可以将防护保持架制造为分离成两个大致相似的半球形部分,半球形部分可以至少部分地嵌套以防护保持架的存储和运输变得紧凑。这两个半球形部分可以通过赤道带可分离地连接。
飞行器的一个意想不到的好处是,它阻止了防护保持架的持续旋转,这是从现有技术的防护保持架已知的现象。
根据本发明的第二方面,提供了一种自主飞行器,其包括用于支撑防护保持架的推力主体,其中,防护保持架包括在展开状态下在包围推力主体的理论表面上延伸的元件,防护保持架构造成可逆地紧凑,用于包装、运输和进入推力主体。
优选地,第二实施例的防护保持架由一对刚性的中空半球体形成,这对中空半球体适于在它们的边缘处结合以形成围绕推力主体的中空球体。防护保持架支撑组件包括从推力主体延伸到防护保持架的内球形表面的至少一对辐条,其中,辐条支撑直接与防护保持架的内表面接合的球面推力轴承。推力轴承使得防护保持架能够沿球形防护保持架的中心沿任何球形方向自由旋转,因为推力轴承和防护保持架之间没有固定的连接点或接触点。
辐条的有效直径可以被固定,以将推力主体大致悬挂在球形防护保持架的中心。然而,辐条和/或推力轴承可以弹性变形,以使得推力主体和防护保持架能够进行有限的相对运动。弹性变形可以由具有伸缩结构的辐条提供,该伸缩结构由弹簧装置推动至中性状态。可替代地,辐条可以形成有一体式弹簧结构特征。
推力轴承可以通过轴向套筒安装在辐条的端部上,该轴向套筒滑动到辐条的端部上的纺锤(spindle)形部上。可以使用紧密滑动配合件或卡扣接合结构来固定推力轴承,但在损坏的情况下便于拆卸以进行维修和更换。
推力主体限定垂直于该推力器或每个推力器的推力轴的平面。通常,推力轴也是转子或每个转子的旋转轴,因此应当相应地理解本说明书。在自主飞行器的一种优选的垂直辐条实施例中,辐条从推力主体平行于推力轴延伸。在替代的横向辐条实施例中,辐条平行于平面延伸。辐条与推力主体的连接长度和连接点优选地被布置成使得当自主飞行器被配置用于飞行(即附接了动力组件和有效载荷例如照相机)时,推力主体的质量的中心通常位于防护保持架的中心之上或之下。在自主飞行器的一些实施例中,推力主体和推力轴承的连接是刚性的,使得推力轴承不能相对于推力主体旋转。在自主驾驶飞行器的一些实施例中,推力主体和辐条之间的连接是旋转轴承,从而使得每个辐条绕其长轴进行旋转。
每个推力轴承可设置有减摩元件以接合防护保持架的内支承表面。减摩元件可以是低摩材料(例如PTFE)制成的垫。减摩元件可以是泡沫垫或用润滑剂(例如,油)润湿的毛毡垫。减摩元件还可以包括支撑滚动元件的结构,其中滚动元件接合防护保持架的内支承表面。滚动元件可以包括滚珠或滚子。例如,滚珠轴承可以保持形成在推力轴承的面向防护保持架的表面中的相应形状的凹槽中。
在优选的实施例中,每个推力轴承可以由支撑一个或多个滚子的防护保持架或底盘组成,滚子围绕与辐条轴相切的轴旋转。每个滚子的表面与防护保持架的内表面接合。由于滚子可以自由旋转,因此防护保持架可以围绕其中心沿着任何方向自由旋转。滚子适应防护保持架的内表面的任何永久性或暂时性不规则性。这种不规则性可能是由于外部结构的碰撞而引起的,这使得防护保持架变形。防护保持架因此可以保持足够的刚性,而不会引起过多的重量损失。
在一个优选实施例中,推力轴承包括防护保持架,该防护保持架的侧面大体上类似于规则多边形。最小的边数为三条(三角形),然而四边形、五边形、六边形、七边形以及最优选的八边形都是可能的。
优选地,滚子具有从中心的最大直径延伸到轴向端的最小直径的锥形表面。更优选地,锥体是球形锥体,使得滚子的横截面露出弓形表面,优选地是球形弓形表面。
根据本发明的第三方面,提供了一种自主飞行器,该自主飞行器包括支撑防护保持架的推力主体,其中,防护保持架包括在展开状态下在包围推力主体的理想表面上延伸的元件,防护保持架被构造成可逆地压缩成更紧凑的结构用于包装和运输,并展开成展开结构。
防护保持架优选地被支撑为相对于推力主体围绕至少两个相互垂直的轴自由旋转。
防护保持架在被展开进行使用时,优选地通常是球形的,以便于沿着任何方向进行滚动运动。
在第一实施例中,防护保持架可以包括沿直径方向隔开的一对轮毂和固定至每个轮毂并在每个轮毂之间延伸的多个弓形梁。每个梁的端部可以通过可枢转锚接合在每个轮毂中。锚可以由圆形销提供。每个梁的锚被布置成使得该锚与每个轮毂的中心径向地间隔开并且与附接到毂的锚彼此周向地间隔开。方便地,轮毂可以具有锁定装置,以将每个梁锁定在从轮毂径向延伸的位置以达到展开状态。锁定装置可以是机械螺钉。轮毂可以包括内部环形盘和外部环形盘,内部环形盘具有带螺纹的中心孔以容纳机械螺钉,内部环形盘和外部环形盘中的每一个都具有形成有径向延伸的凹槽的相对表面以容纳每个梁的端部,并且具有周向间隔开的孔的环形部以捕获销,由此拧紧机械螺钉,从而径向锁定梁端部在每个凹槽中的位置,松开机械螺钉使得梁能够枢转到压紧状态。
防护保持架优选地包括至少一个可移除地固定至每个梁的圆形支柱。支柱可以通过形成在支柱或梁之一上的销固定到每个梁上,并且被布置成容纳在形成在支柱上的销孔中。
自主飞行器可以具有可绕推力主体的至少一个轴旋转的外环,所述外环支撑从外环径向向外延伸的两个耳轴,每个机械螺钉都具有轴向孔,以容纳耳轴并将防护保持架连接至自主飞行器,以绕着耳轴的轴旋转。外环可以提供环形轨道通道,内环通过从内环径向向外突出的滚子与外环接合,以接合在外环通道中,由此防护保持架可以围绕至少第二轴旋转。优选地,悬梁从推力主体径向延伸,使得悬梁的相对端通过旋转轴承与内环接合,从而内环可绕着第三轴自由旋转。
附图说明
现在将参考附图仅以示例的方式描述根据本发明构造的具有可绕着至少两个垂直轴旋转的可压缩防护保持架的自主运载工具的实施例;在附图中:
图1.1是防护保持架处于展开结构的自主运载工具的SE等距视图;
图1.2是准备部分折叠防护保持架的自主运载工具的SE等距视图;
图1.3是防护保持架折叠成紧凑结构的自主运载工具的SE等距视图;
图1.4是防护保持架的梁的SE等距视图;
图1.5是移除了防护保持架的梁和支柱的自主运载工具的截面正视图;
图1.6是移除了防护保持架的梁和支柱的自主运载工具的左视图;
图2.1是自主运载工具的第二实施例的俯视图;
图2.2是第二实施例的正视图;
图2.3是图2.1中线2.3-2.3上的剖视图;
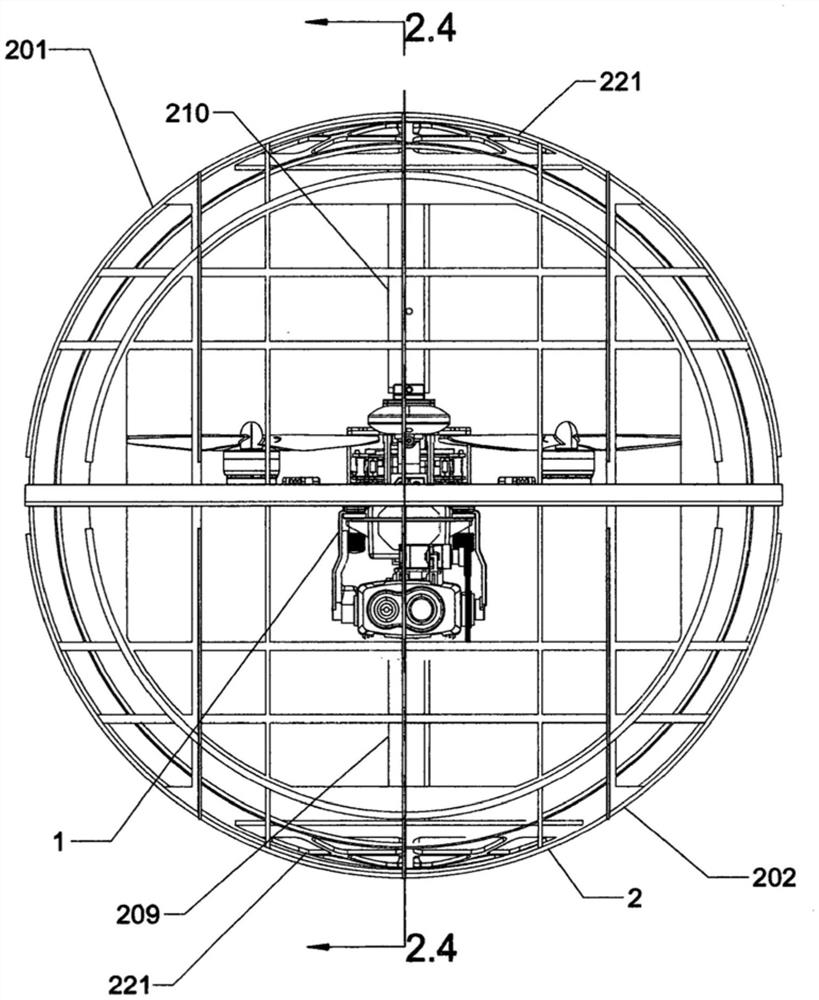
图2.4是图2.2中线2.4-2.4上的剖视图;
图2.3.1是图2.3的详细放大前视图;
图2.5是推力主体和防护保持架支撑装置的SE等距视图;
图2.5.1是将防护保持架支撑组件的辐条固定到推力主体上的夹持组件的SE等距视图;
图2.5.2是防护保持架支撑组件的辐条和防护保持架支撑组件的推力轴承之间的联接的SE等距视图;
图3.1是第三实施例的等距SW视图;
图3.2是第三实施例的俯视图;
图3.3是第三实施例的等距SW视图,其示出了防护保持架的上部被移除。
图3.4是第三实施例的放大等距SW视图,其中,防护保持架、升力体和滚柱轴承被移除;以及
图3.5是辐条和推力轴承的剖视图。
具体实施方式
应该注意的是,如图所示,对水平和垂直的引用仅指UAV的方向,显然,UAV在使用中可以采取其他方向。
第一实施例
图中所示的自主运载工具包括总体上由箭头1表示的推力主体,该推力主体支撑总体上由箭头2表示的防护保持架。推力主体1具有底盘3,该底盘3支撑电池组,该电池组被布置成为由布置成使四个转子5旋转的马达4提供的四个推力器中的每一个提供动力。在每个实施例中,如本领域技术人员所知的那样,推力主体包括自主控制器和遥控应答器,以独立地控制马达的速度,从而实现滚动、倾斜和偏航,以便响应于从远程手动操作的遥控器接收的控制信号来引导转子的推力。遥控器可以是专用设备或具有无线通信功能的通用控制设备例如手机。用于这种控制的技术是技术领域中的公知常识。
推力主体1悬挂在悬梁6上,该悬梁6从推力主体沿自主运载工具的Y轴或平行于该Y轴的每个方向等距延伸,以终止于固定在轴承壳体8中的旋转滚动元件轴承7。轴承壳体8形成为环绕推力主体1的内环9。
内环9支撑一对径向向外的滚子10,每个滚子与轴承壳体8间隔90°。滚子10通过滚动元件支撑在轴11上。滚子接合在通道部分外环12中,从而内环可在外环内自由旋转并提供围绕推力主体1的“Z轴”的旋转。
外环12支撑径向向外延伸的一对耳轴13。
每个耳轴13支撑轮毂组件。每个轮毂组件包括内轮毂盘14、外轮毂盘15和机械螺钉16。每个轮毂盘都有一个中心孔,该孔的尺寸被设计成可容纳机械螺钉16。外轮毂盘15的中心孔15.1是通孔,而内轮毂盘14的内孔14.1是螺纹孔。六个凹槽14.2和15.2从每个内轮毂盘和外轮毂盘的环面径向延伸并位于轮毂盘的相对表面上。由六个轴向延伸的孔14.3和15.3组成的I形环以相似的圆周和径向间距形成在每个内轮毂盘和外轮毂盘上。
防护保持架2由六个梁17形成。每个梁17被弯曲成弓形。每个梁17的每个端部形成有圆柱销18,该圆柱销沿着梁17的弧的弦延伸,以可以将每个梁容纳到销孔14.3和15.3中,从而将梁的端部限制在内轮毂盘和外轮毂盘之间。每个轮毂组件的轮毂盘14和15可通过将每个梁对准成对的凹槽14.2和15.2中的一个并将机械螺钉16拧紧在内轮毂盘14的螺纹中而封闭在一起。机械螺钉16在其轴上形成有轴向孔16.1,该轴向孔16.1适于容纳耳轴13。因此,防护保持架2通过梁的弹性保持在外环上,梁防止机械螺钉16脱离耳轴13。
当防护保持架展开时,防护保持架由两个圆形支柱19加固。圆形支柱19具有六个以规则的圆周间隔向内的销19.1。每个销19.1被设置成接合在形成于每个梁17中的两个梁销孔17.1中的一个梁销孔中,以形成如图1.1所示的组装的防护保持架。
为了折叠防护保持架2,如图1.2中尤其是轮毂组件的细节所示,机械螺钉16至少被部分拧松。每个梁销18足够长,以保持被限制在其各自的孔14.3、15.3中,但是可以自由地移出径向凹槽14.2和15.2,从而可以枢转成图1.3所示的状态。展开防护保持架以供使用是相反的操作。
该自主运载工具能够以任何方向沿着地面、墙壁或天花板滚动,而无需防护保持架的运动向推力主体施加扭矩。自主运载工具也将能够飞行。
在图2.1至图2.4所示的自主飞行器的第二实施例中,自主飞行器具有支撑防护保持架2的推力主体1。防护保持架2由在展开状态下延伸以形成包围推力主体1的多孔球形表面的元件形成。防护保持架2被构造成可逆地紧凑,以用于包装、运输和接近推力主体。
第二实施例
第二实施例的防护保持架由包括一对具有相似半径的刚性中空半球体201、202的元件形成。如图所示,第一下半球体201具有轮辋环203,在该轮辋环203上形成有外螺纹204和台肩支座205。第二半球体202具有形成有与外螺纹204互补的内螺纹207的轮辋环206,由此第一半球体201和第二半球体202可围绕推力主体1结合在一起以形成围绕推力主体的中空球体。通过颠倒组合过程,可以将防护保持架的各个元件分开并嵌套,以便紧凑运输。
为了获得防护保持架2的期望的刚性,每个部分201、202可以由细长元件201.1、202.1的腹板(web)形成,细长元件201.1、202.1围绕半球模具模制或模制到半球模具中,或者注射模制到所示的半球形状中,使得每个元件201.1、202.1与任何其他交叉元件的接合处是刚性的,由此防护保持架倾向于保持其形状。此外,每个元件的内表面并因此防护保持架尽可能靠近球体的表面,以提供被通道中断的支承表面。通道允许空气以任何方向流过防护保持架。
防护保持架支撑组件包括至少一对辐条209、210,辐条从设置在推力主体1上的相应安装组件211、212延伸。在该变型中,辐条209、210平行于转子5的推力轴并且直径上相反的方向(如图所示,向下和向上)延伸。
在第二实施例的一个变型中(未示出),辐条可以在大体上垂直于推力轴的平面内从推力主体1延伸。在这些变型中,推力主体1前后不对称,该不对称是通过在推力主体1的前部安装摄像机213来确定的。大体上垂直于推力平面设置的辐条可以在这些极端之间横向地和/或前后地或以任何基本上或有效的径向设置中延伸。在使用垂直辐条的情况下,辐条不需要完全平行于推力轴,但只要辐条从推力主体到防护保持架的半径足够大,就会倾斜。通常,两个径向相对的辐条是优选的,用于简化结构并减轻重量。然而,辐条布置的任何组合都是可能的,只要该布置将推力主体大致居中地悬挂在防护保持架中。
辐条209、210被类似地构造并且可互换以最小化构造成本。每个辐条209、210由实心“L”形均匀截面梁提供,该梁具有由垂直于第一主腹板的第二腹板215加强的第一主腹板214。在变型中,也可以使用I型或T型梁。在所示的第二实施例中,第三腹板216绕联接至推力主体1的辐条的端部延伸。第三腹板216接合在安装组件211、212上的一对相对的“L”型夹爪217之间,“L”型夹爪217形成夹持结构。夹持结构通过旋转轴承218支撑在推力主体上,这使得夹持结构和辐条210围绕辐条的长轴自由旋转。
在辐条的变型中,第一腹板可以形成为桁架以最小化重量并且最大化强度。
每个辐条的远离第三腹板216的端部设置有圆柱形套管(spigot)219。套管219容纳在一体形成在推力轴承221的径向内表面上的套筒220中。
两个相对设置的推力轴承221中的每一个都由凸盘提供,该凸盘的外球面的曲率半径类似于球形防护保持架2的内表面的曲率半径。防护保持架的内表面和推力轴承221的球形外表面中的每一个都成形为没有突起或障碍物,使得推力轴承能够在表面上自由滑动。通过在防护保持架部件和推力轴承的制造中使用低摩材料可以进一步促进这一点。在一些变型中,防护保持架的内表面和/或推力轴承的接触外表面可以由低摩涂层或膜片提供。盘上开有孔,以利于空气通过推力轴承和防护保持架。
球形防护保持架形成有多个孔222,以在空气被推进器推动时促进空气流入和流出防护保持架。这些孔可以均匀地分布在防护保持架的表面上,以避免不利地影响来自推进器的推力。在所示的变型中,孔是位于球的表面上的曲线正方形。这允许防护保持架的材料由具有高纵横比的元件223形成,即,孔的周向面积远大于防护保持架的材料的周向面积。
每个推力轴承都形成有许多孔,以允许进行不受限制的空气流通,从而确保来自推进器的推力的方向可预测。
第三实施例
第三实施例具有大体上类似于第二实施例的推力主体1和防护保持架2。防护保持架支撑组件包括由相对的直立侧构件224.1形成的箱形截面结构224,该箱形截面结构224由两个隔开的相对的水平构件224.2连接并隔开。侧构件224.1和水平构件224.2被穿孔以减轻重量并且提供固定点,以用于使用机械螺钉和支架224.3将箱形截面结构224固定到升力体。辐条安装插座224.4安装在每个水平构件224.2的中央。每个辐条安装插座224.4是圆柱形管,该圆柱形管被模制以提供安装支架224.5来容纳用于将其连接到水平构件的螺钉。提供沿直径相对的孔224.6,使得当圆柱形辐条209.1、210.1的近端被插入到插座224.4时,近端通过穿过孔224.6和相应的孔209.2中的每一个的销或螺栓(未示出)进行固定。
除了位置和防方向之外,每个辐条和推力轴承组件都是相同的,因此只对其中一个进行详细描述。
辐条209.1的远端连接至主轴结构225。主轴结构包括圆柱形中空盲插座225.1,辐条209.1的远端容纳在圆柱形中空盲插座225.1中。辐条209.1的远端通过将销或螺栓(未示出)穿过分别形成在辐条远端和插座225.1中的孔209.2、225.2来固定。主轴插座225.1的远端由支撑轴向延伸的主轴225.3的结构封闭。
主轴225.3为旋转轴承226提供旋转轴承轴。旋转轴承226便于推力轴承221的旋转和保持。
在第三实施例中,推力轴承221包括轴承保持架221.1。轴承保持架221.1具有轮毂,该轮毂具有为旋转轴承226提供的轴向轴承壳体,由此,轴承保持架221.1被安装在主轴225.3上。八个等角间隔的辐条221.2从轮毂径向延伸以支撑轴环221.3。轴环221.3的形状像正八边形,以为轴环提供八个侧面。轴支撑件221.4径向地延伸,每个轴支撑件从轴环的一侧之间的每个接合处延伸。每个轴支撑件221.4提供了两个轴保持座221.5。每个轴保持座221.5被对准以容纳平行于轴环的一侧延伸的轴承轴221.6的一端,使得八个轴的环被保持围绕轮毂延伸并与和主轴225.3同心的圆相切。为了允许每个轴的端部被容纳在其相应的插座中,插座板221.6可移除地固定至轴支撑件221.4。每个轴221.6可旋转地安装圆柱滚子221.7。每个圆柱滚子221.7具有逐渐变细的球形圆柱表面,球形圆柱表面从中心的最大半径到轴向端部的最小直径逐渐变细。锥体的横截面呈弧形。
每个滚子221.7的表面抵靠防护保持架的内表面。由于滚子可以绕其安装轴自由滚动,并且推力轴承可以绕其轮毂自由旋转,因此防护保持架可以围绕球形防护保持架的中心沿着任何球形方向自由滚动。
表2
- 具有沿每个球形方向能够旋转的防护保持架的自主飞行器
- 具有能够使两个旋转轴对称旋转和相同方向旋转的交叉搅拌叶片的搅拌机及搅拌方法