抗侧风垂直起降无人机及其抗侧风方法
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及无人机技术领域,具体涉及一种抗侧风垂直起降无人机及其抗侧风方法。
背景技术
侧风对于无人机起降阶段的飞行安全影响较大,特别是对于尾座式的垂直起降无人机,其起降阶段的侧风迎风面积较大,侧风造成的侧力会使飞机发生偏离。
现有的抗风控制方案一般有以下几种:
倾斜法:让飞机有一个倾斜姿态,来平衡侧力造成的影响。倾斜法实质是通用的位置控制方法在侧风环境下的正常反应。该方法中,飞机的迎风面积过大,会导致如下两个问题:1、飞机在着陆时有姿态倾斜,倾斜姿态过大可能会导致飞机起降支撑装置损毁,导致飞机着陆失败;2、迎风面积过大导致飞机的侧向过载过大,且侧风越大侧向过载越大,可能会导致飞机的结构损伤。
遥控操纵:飞手使用遥控器进行目视飞行,根据所施加的操纵和无人机的响应来判断风的来向,并通过操控使飞机偏航到和机翼展长方向和侧风方向一致的状态。该方法依赖飞手及飞手的操纵经验,存在如下问题:1、必须有飞手来进行操纵,提高了系统成本;2、飞手操纵经验不足的话,无法实现飞机机翼展长方向和侧风方向一致,会导致倾斜法中存在的问题。
发明内容
为此,本发明提供一种抗侧风垂直起降无人机及其抗侧风方法,以解决垂直起降无人机起降阶段受侧风影响的问题。
为了实现上述目的,本发明提供如下技术方案:
本发明的第一方面,一种抗侧风垂直起降无人机,包括无人机本体和与所述无人机本体分体设置的风速风向仪,所述无人机本体包括机身、设置于所述机身内的飞控机、设置于所述机身两侧的机翼、设置于所述机翼前方的螺旋桨、与所述螺旋桨传动连接的电机、设置于所述机翼后方的舵面、与所述舵面传动连接的舵机,所述风速风向仪与所述飞控机通讯连接,所述飞控机与所述电机、所述舵机线缆连接。
进一步地,所述电机的后端与所述机翼固定,所述螺旋桨固定于所述电机前端的主动轴上。
进一步地,所述舵面通过铰链轴连接与所述机翼的尾部,所述舵机设置于所述机翼内,所述舵面在所述机翼的带动下可以绕铰链轴转动。
进一步地,所述风速风向仪与地面站线缆连接,所述地面站与所述飞控机无线通讯连接。
进一步地,在所述机身的头部设有与所述飞控机线缆连接的机载端,所述机载端与所述地面站无线通讯连接。
本发明的第二方面,一种抗侧风垂直起降无人机的抗侧风方法,包括以下步骤:
接收风速风向仪测量的风速风向信息;
获得姿态信息;
获得高度信息;
依风速风向信息和姿态信息计算生成副翼控制通道信息,根据副翼通道控制信息进行翼展方向控制、倾斜控制,从而控制飞机朝向;
依姿态信息和高度信息计算生成油门控制通道信息,根据油门控制通道信息进行高度控制、偏航控制,从而控制飞机高度和偏航。
进一步地,所述接收风速风向仪测量的风速风向信息,包括如下步骤:
风速风向仪测量风速风向生成风速风向信息,并经线缆将风速风向信息传递至地面站;
地面站将风速风向信息通过无线通讯发送至机载端;
机载端接收风速风向信息并经线缆发送至飞控机;
飞控机接收风速风向信息。
进一步地,所述根据油门控制通道信息进行高度控制、偏航控制,从而控制飞机高度和偏航,包括以下步骤:
驱动舵机偏转;
带动舵面偏转;
控制飞机朝向。
进一步地,所述根据油门控制通道信息进行高度控制、偏航控制,从而控制飞机高度和偏航,包括以下步骤:
驱动电机转动;
改变螺旋桨转速;
控制飞机高度和偏航。
本发明具有如下优点:
通过风速风向仪测得风速风向信息,飞控机根据风速风向信息、姿态信息和高度信息,控制舵机偏转并控制电机转动,从而控制飞机朝向、高度和偏航,使机翼展长方向和侧风方向一致,不需要飞手操纵,降低了系统成本;更不需要依赖飞手经验,避免因操作不当导致飞机在着陆时有姿态倾斜,进而避免导致飞机着陆失败。
附图说明
为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引申获得其它的实施附图。
本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容所能涵盖的范围内。
图1为本发明实施例1提供的一种抗侧风垂直起降无人机的结构示意图(省略风速风向仪)。
图2为本发明实施例1提供的抗侧风垂直起降无人机的总体连接示意图(机翼展长方向和侧风方向不一致)。
图3为本发明实施例1提供的抗侧风垂直起降无人机的总体连接示意图(机翼展长方向和侧风方向一致)。
图4为本发明实施例2提供的一种抗侧风垂直起降无人机的抗侧风方法的流程图。
图5为本发明实施例2提供的一种抗侧风垂直起降无人机的抗侧风方法的控制算法的坐标系示意图。
图6为本发明实施例2提供的一种抗侧风垂直起降无人机的抗侧风方法的倾斜控制示意图。
图7为本发明实施例2提供的一种抗侧风垂直起降无人机的抗侧风方法的控制算法的侧风影响下的偏航示意图。
图8为本发明实施例2提供的一种抗侧风垂直起降无人机的抗侧风方法的高度控制逻辑流程图。
图中:1-机身,2-飞控机,3-机翼,4-螺旋桨,5-电机,6-舵面,7-舵机,8-机载端,9-风速风向仪,10-地面站。
具体实施方式
以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
实施例1
如图1-3所示,实施例1提供了一种抗侧风垂直起降无人机,包括无人机本体和与无人机本体分体设置的风速风向仪9,无人机本体包括机身1、设置于机身1内的飞控机2、设置于机身1两侧的机翼3、设置于机翼3前方的螺旋桨4、与螺旋桨4传动连接的电机5、设置于机翼3后方的舵面6、与舵面6传动连接的舵机7,风速风向仪9与飞控机2通讯连接,飞控机2与电机5、舵机7线缆连接。
其中,电机5的后端与机翼3固定,螺旋桨4固定于电机5前端的主动轴上。舵面6通过铰链轴连接与机翼3的尾部,舵机7设置于机翼3内,舵面6在机翼3的带动下可以绕铰链轴转动。风速风向仪9与地面站10线缆连接,地面站10与飞控机2无线通讯连接。在机身1的头部设有与飞控机2线缆连接的机载端8,机载端8与地面站10无线通讯连接。
如图2和3所示,图2是本实施例的抗侧风垂直起降无人机起降的初始状态,机翼展长方向和侧风方向不一致,此时还未进行抗侧风自动调节;图3是本实施例的抗侧风垂直起降无人机在抗侧风自动调节的作用下,调节完成后的一个终止状态,即机翼展长方向和侧风方向一致。当垂直起降无人机起飞或降落时,风速风向仪测量风速风向生成风速风向信息,并经线缆将风速风向信息传递至地面站;地面站将风速风向信息通过无线通讯发送至机载端;机载端接收风速风向信息并经线缆发送至飞控机;飞控机接收风速风向信息;飞控机获得无人机本体自测得到的姿态信息和高度信息;飞控机依风速风向信息和姿态信息计算生成副翼控制通道信息,根据副翼通道控制信息进行翼展方向控制、倾斜控制,驱动舵机偏转,带动舵面偏转,从而控制飞机朝向;飞控机依姿态信息和高度信息计算生成油门控制通道信息,根据油门控制通道信息进行高度控制、偏航控制,驱动电机转动,改变螺旋桨转速,从而控制飞机高度和偏航。使机翼展长方向和侧风方向一致,不需要飞手操纵,降低了系统成本;更不需要依赖飞手经验,避免因操作不当导致飞机在着陆时有姿态倾斜,进而避免导致飞机着陆失败。
本方案作用于飞机的起飞和降落阶段,其中,起飞和降落阶段的进入和完成通常根据高度来判断。例如本实施例中飞机在降落时,从高度离地15米开始进入降落阶段,到离地高度0时完成降落阶段。在起飞时,从离地高度0,地面站发送起飞指令后进入起飞阶段,在高度达到离地15米高度完成起飞阶段。
实施例2
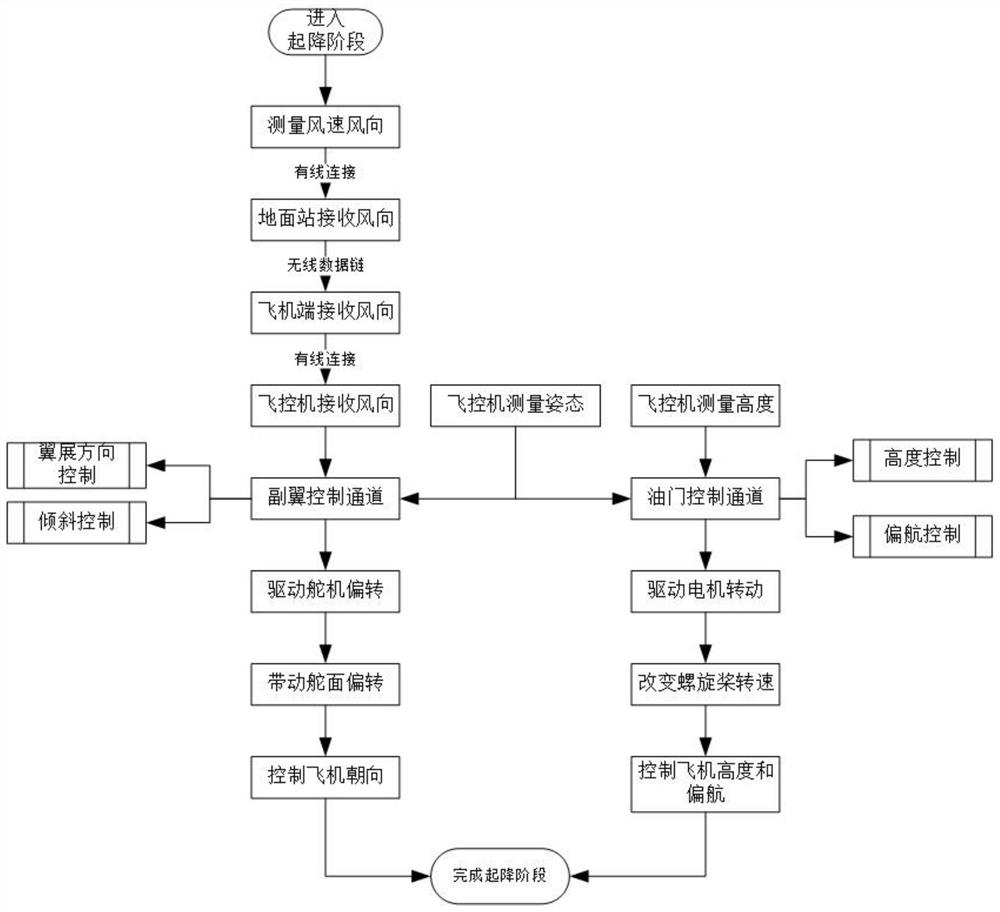
如图4所示,实施例2提供了一种抗侧风垂直起降无人机的抗侧风方法,包括以下步骤:
风速风向仪测量风速风向生成风速风向信息,并经线缆将风速风向信息传递至地面站;
地面站将风速风向信息通过无线通讯发送至机载端;
机载端接收风速风向信息并经线缆发送至飞控机;
飞控机接收风速风向信息。
飞控机获得姿态信息;
飞控机获得高度信息;
飞控机依风速风向信息和姿态信息计算生成副翼控制通道信息,根据副翼通道控制信息进行翼展方向控制、倾斜控制,驱动舵机偏转,带动舵面偏转,从而控制飞机朝向;
依姿态信息和高度信息计算生成油门控制通道信息,根据油门控制通道信息进行高度控制、偏航控制,驱动电机转动,改变螺旋桨转速,从而控制飞机高度和偏航。
通过风速风向仪测得风速风向信息,飞控机根据风速风向信息、姿态信息和高度信息,控制舵机偏转并控制电机转动,从而控制飞机朝向、高度和偏航,使机翼展长方向和侧风方向一致,不需要飞手操纵,降低了系统成本;更不需要依赖飞手经验,避免因操作不当导致飞机在着陆时有姿态倾斜,进而避免导致飞机着陆失败。
本发明的目的主要在于抗侧风,该目的主要通过飞控机按照当前风向,根据设定好的控制算法来计算舵面偏度实现,该方法在起飞和降落段一致,而高度控制在抗侧风时采用的算法只在降落阶段与常规控制算法不同,所以在此以降落阶段为例,举例说明飞控机中的控制算法。
地轴系下建立坐标系为正北向表示X轴(即图5中的Xe轴),正东向表示Y轴(即图5中的Ye轴),飞机翼展坐标系X轴(即图5中的Xb轴)沿着机翼翼展方向向右为正,Y轴(即图5中的Yb轴)为垂直于指向飞机背部方向为正,风向和飞机航向都采用北偏东角度来表示,如图5所示。
A.副翼通道控制
a)翼展方向控制
如图6所示,飞机展长方向角度为φ
δ
其中,p为飞机的横滚角速率,可以通过飞控计算机内的惯性导航传感器测量到,K
式(2)表示机翼展长方向和风向的偏差,并将其转化到[-180,180)deg范围内,以确保飞机在调整翼展方向时不会出现转动超过180deg的情况。
则左右副翼的偏度为:
左右副翼正方向为副翼后缘往Yb正方向偏为正。
副翼除了作为垂直起降阶段的展长方向控制(平飞时的滚转控制)作用,还可以作为垂直起降阶段的俯仰控制,因为在调节过程中,飞机会有一定的倾斜角,为了着陆安全,副翼还需要进行倾斜控制。
b)倾斜控制
因为在调节过程中,还会有侧风的影响,所以飞机还需要一部分倾斜才能实现平衡,倾斜角度表示如图6所示。
倾斜角度为飞机Z轴(即Zb轴)和地轴系Ze轴之间的夹角在飞机对称平面上的夹角θ,为实现安全着陆,该角度在着陆前需要修正到比较小的值,副翼通道控制的另一个目的进行倾斜控制,将倾斜角修正到较小值(理想情况下可修正到0)。
采取倾斜控制算法如下:
δ
式(4)中,θ为倾斜角,即俯仰角,q为俯仰角速率,K
进行倾斜控制时左右副翼同向偏转,作为升降舵使用,所以有:
δ
c)总控制量
则副翼通道总的控制量为:
联立式(1)~(6)即可得到副翼通道的控制算法。
B.油门通道控制
油门通道控制也有两个控制目的,一是合理控制飞机高度,使其安全着陆,其次,由于有两个电机,也可以差动控制航向,使飞机在着陆前有一个比较小的航向角而确保着陆安全。
a)偏航控制
在侧风中,飞机不但会有倾斜,也会有偏航,如图7所示。
在侧风下飞机机头方向会和地轴系Z轴有偏差,该偏差在机翼翼展平面的分量即为偏航角ψ,为保证着陆安全,该偏航角也需要保持比较小。
偏航角修正可以采用左右电机油门差动控制,则左右两个螺旋桨转速不同,从而提供偏航修正力矩,偏航角修正的控制律如下:
Δδ
其中,r为偏航角速率,可由集成在飞控系统中的传感器测量得到,K
将左右油门分别记为,δ
b)高度控制
飞机离地高度为0时,完成着陆,对于垂直起降无人机,在着陆时速度过大或者姿态过大都会影响着陆安全,所以,需要先在接近地面时将飞机的姿态角(偏航角和倾斜角)控制到较小范围,然后减小油门,使其着陆,能实现安全着陆。
高度控制分为2个阶段,第1阶段为减小姿态角,第2阶段为小油门恒定下降速度降低高度。在本实施例中,这2个阶段以高度0.2米为界限。高度控制律流程逻辑如图8。
由图8中的流程逻辑可以获得高度变化率指令,然后由高度变化率指令和当前高度变化率,则通过高度控制律调节油门,来实现高度控制。
控制律如下:
其中,
c)总控制量
式(10)中δ
虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
- 抗侧风垂直起降无人机及其抗侧风方法
- 一种提高垂直起降阶段抗侧风性能的复合翼无人机