一种伺服系统用在线自适应陷波滤波器实现方法
文献发布时间:2023-06-19 11:11:32
技术领域
本发明涉及伺服驱动器在线识别谐振频率技术领域,尤其涉及一种伺服系统用在线自适应陷波滤波器实现方法。
背景技术
在机电伺服系统中,电机和负载是通过联轴器、齿轮或者传动轴等传动机构进行连接。实际的传动装置并不是理想刚体,存在一定的柔性,这些非刚体在受到转矩时会发生弹性形变,从而导致电机和负载在传递的过程中产生滞后,这样伺服系统就很容易发生机械谐振。发生机械谐振时伺服电机电流环处于正负交替饱和输出状态,负载端的强烈抖动将严重影响负载端工作质量,电机轴的强烈振动,既影响了伺服电机的寿命,也限制了伺服控制器的增益和速度环带宽。因此,必须采取有效措施抑制机械谐振。
随着伺服控制数字化和控制理论的发展,大部分控制手段采用非机械手段的抑制,例如低通滤波器、陷波滤波器、双二阶滤波器等。其中,低通滤波器会给系统带来相位滞后,严重影响系统的增益,限制了系统的带宽;双二阶滤波器过于依赖参数的准确性,不够准确的双二阶滤波器参数可能导致谐振抑制失败,甚至直接导致系统失稳。
陷波滤波器是带阻滤波器的一种特殊形式,其组织信号的频率带宽非常窄,仅对某一特定频率的信号产生衰减作用,可以有效抑制系统的中高频谐振。目前大多数的陷波参数确定方法都是通过加入测试信号获取系统的伯德图,手动确定陷波滤波器的参数,而无法在线确定并实时优化更新陷波滤波器参数。
发明内容
基于背景技术中提出的陷波滤波器是带阻滤波器的一种特殊形式,其组织信号的频率带宽非常窄,仅对某一特定频率的信号产生衰减作用,可以有效抑制系统的中高频谐振。目前大多数的陷波参数确定方法都是通过加入测试信号获取系统的伯德图,手动确定陷波滤波器的参数,而无法在线确定并实时优化更新陷波滤波器参数的技术问题,本发明提出了一种伺服系统用在线自适应陷波滤波器实现方法。
本发明提出的一种伺服系统用在线自适应陷波滤波器实现方法,包括陷波滤波器、控制器和伺服系统,包括以下步骤:
步骤一:谐振频率根据q轴电流指令确定,以电流指令更新频率作为采样频率,一次性采集1024个Iqref数据,利用快速FFT计算确定谐振频率;
步骤二:谐振的判断依据:谐振频率大于基波频率;谐波幅值大于设定的阈值,若满足条件,记录谐振频率和幅值;
步骤三:继续重复两次步骤2和步骤3,若连续三次计算得到的谐振频率和幅值的误差在一定范围内,则判定谐振检测有效,否则无效;
步骤四:共设5个陷波滤波器,若检测出谐振多于5个,则保留谐振幅值较大的5组;
步骤五:设计陷波滤波器,陷波滤波器公式为:
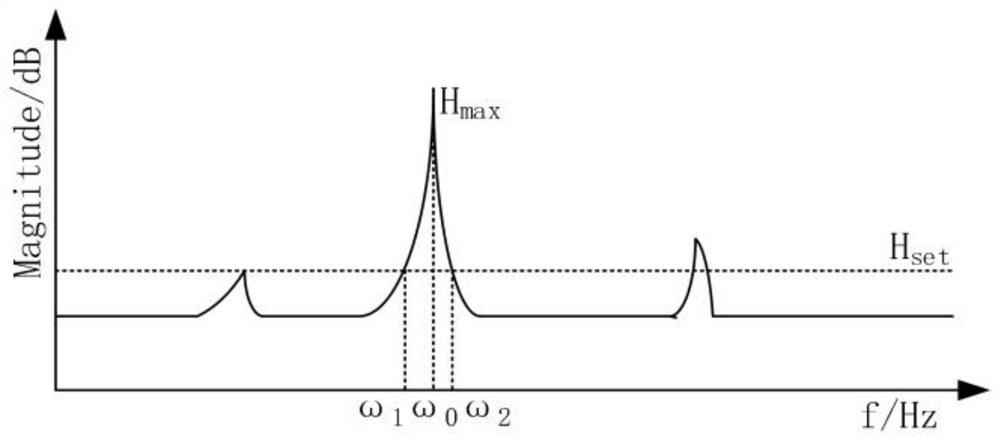
步骤六:确定wn、k1和k2的取值,Hset为设定的阈值,Hmax为谐振最大幅值,w0为谐振频率,w1、w2分别为Hset对应的频率;
步骤七:陷波器的离散表示,由于实际的伺服系统是基于数字控制的,需要将陷波器数字化,采用tustin双线性将陷波滤波器进行离散化,具体过程如下:
采样时间为T,采用双线性变换,将
用离散形式表示为:
y(n)=-a
优选地,所述步骤五k1决定陷波深度,其取值范围为(0,1);k2决定陷波宽度,wn为谐振频率。
优选地,所述步骤六中k2参数的设置应使其满足:
B
k1参数的设置应使其满足:
wn参数的设置应使其满足:wn=w0。
5、优选地,所述步骤七中,x(n)为滤波输入,即速度控制器的输出量;y(n)为滤波输出,即电流环给定;b0、b1、b2、a1、a2为数字陷波滤波器的参数,表示如下:
优选地,从所述陷波滤波器中选取一个自适应陷波器更新所述谐振频率的谐振参数,以对所述伺服系统进行谐振抑制包括:配置所述陷波滤波器组中的一个自适应陷波器处于活跃状态;从陷波滤波器组选取处于活跃状态的自适应陷波器更新所述谐振频率的谐振参数,以对伺服系统进行谐振抑制。
优选地,所述谐振抑制条件为:所述谐振频率最大值所对应的幅值大于预设幅值阈值;所述谐振频率对应的实际电流幅值大于预设电流阈值,且谐振频率大于系统当前带宽与预设倍数系数的乘积。
优选地,所述机械谐振抑制方法包括:
S1:将控制器的输出电压信号或负载的位移信号作为待处理信号;
S2:将待处理信号作为陷波滤波器的输入信号,采用极值搜索算法,将陷波滤波器的中心频率作为待搜索变量,并不断获取陷波滤波器的输出信号幅值,直至陷波滤波器的输出信号幅值达到最大,此时陷波滤波器的中心频率为机电伺服系统的机械谐振频率;
S3:将待处理信号作为陷波滤波器的输入信号,将所述机械谐振频率作为陷波滤波器的中心频率,采用极值搜索算法,将陷波滤波器的宽度参数和深度参数均作为待搜索变量,并不断获取陷波滤波器的输出信号幅值,直至陷波滤波器的输出信号幅值达到最小;
S4:在所述控制器内添加陷波滤波单元,将输出信号幅值最小时的陷波滤波器的宽度参数和深度参数分别作为陷波滤波单元的宽度参数和深度参数,将所述机械谐振频率作为陷波滤波单元的中心频率,并通过该控制器对机电伺服系统进行控制。
本发明中的有益效果为:
1、该伺服系统用在线自适应陷波滤波器实现方法,本发明一种伺服系统用在线自适应陷波滤波器实现方法适用于伺服电机和负载连接的任何传动装置,不依赖于数学模型的准确性,只对谐振频率处的幅值进行在线检测,通用性强。
2、该伺服系统用在线自适应陷波滤波器实现方法,本发明一种伺服系统用在线自适应陷波滤波器实现方法有别于离线谐振检测的一次检测方法,在线陷波滤波器可实现实时检测,实时更新陷波器参数。
3、该伺服系统用在线自适应陷波滤波器实现方法,通过设置有与现有的自适应陷波器谐振抑制方法相比,本发明所述的机械谐振抑制方法计算量小,实时性高。通过实时在线检测对陷波滤波器的关键参数进一步优化,以获得更好的谐振抑制效果。对实现伺服谐振的抑制具有重要意义;
4、该伺服系统用在线自适应陷波滤波器实现方法,与传统的离线手动设置陷波参数相比,能够最大限度的降低机械谐振的幅度,保证设备长期稳定运行,提高了设备使用寿命。除此之外,由于本发明所述的机械谐振抑制方法计算量小,使得实现本发明的功能装置的结构相对简单,因此本发明对相关硬件的要求也较低。
该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现。
附图说明
图1为本发明提出的一种伺服系统用在线自适应陷波滤波器实现方法的谐振检测示意图;
图2为本发明提出的一种伺服系统用在线自适应陷波滤波器实现方法的检测方法的流程示意图。
具体实施方式
下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
下面详细描述本专利的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本专利,而不能理解为对本专利的限制。
在本专利的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。
在本专利的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”应做广义理解,例如,可以是固定相连、设置,也可以是可拆卸连接、设置,或一体地连接、设置。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本专利中的具体含义参照图1-2,一种伺服系统用在线自适应陷波滤波器实现方法,包括陷波滤波器、控制器和伺服系统,包括以下步骤:
步骤一:谐振频率根据q轴电流指令确定,以电流指令更新频率作为采样频率,一次性采集1024个Iqref数据,利用快速FFT计算确定谐振频率;
步骤二:谐振的判断依据:谐振频率大于基波频率;谐波幅值大于设定的阈值,若满足条件,记录谐振频率和幅值;
步骤三:继续重复两次步骤2和步骤3,若连续三次计算得到的谐振频率和幅值的误差在一定范围内,则判定谐振检测有效,否则无效;
步骤四:共设5个陷波滤波器,若检测出谐振多于5个,则保留谐振幅值较大的5组;
步骤五:设计陷波滤波器,陷波滤波器公式为:
步骤六:确定wn、k1和k2的取值,Hset为设定的阈值,Hmax为谐振最大幅值,w0为谐振频率,w1、w2分别为Hset对应的频率;
步骤七:陷波器的离散表示,由于实际的伺服系统是基于数字控制的,需要将陷波器数字化,采用tustin双线性将陷波滤波器进行离散化,具体过程如下:
采样时间为T,采用双线性变换,将
用离散形式表示为:
y(n)=-a
本发明中,步骤五k1决定陷波深度,其取值范围为(0,1);k2决定陷波宽度,wn为谐振频率。
本发明中,步骤六中k2参数的设置应使其满足:
B
k1参数的设置应使其满足:
wn参数的设置应使其满足:wn=w0。
本发明中,步骤七中,x(n)为滤波输入,即速度控制器的输出量;y(n)为滤波输出,即电流环给定;b0、b1、b2、a1、a2为数字陷波滤波器的参数,表示如下:
本发明中,从陷波滤波器中选取一个自适应陷波器更新谐振频率的谐振参数,以对伺服系统进行谐振抑制包括:配置陷波滤波器组中的一个自适应陷波器处于活跃状态;从陷波滤波器组选取处于活跃状态的自适应陷波器更新谐振频率的谐振参数,以对伺服系统进行谐振抑制。
本发明中,谐振抑制条件为:谐振频率最大值所对应的幅值大于预设幅值阈值;谐振频率对应的实际电流幅值大于预设电流阈值,且谐振频率大于系统当前带宽与预设倍数系数的乘积。
本发明中,机械谐振抑制方法包括:
S1:将控制器的输出电压信号或负载的位移信号作为待处理信号;
S2:将待处理信号作为陷波滤波器的输入信号,采用极值搜索算法,将陷波滤波器的中心频率作为待搜索变量,并不断获取陷波滤波器的输出信号幅值,直至陷波滤波器的输出信号幅值达到最大,此时陷波滤波器的中心频率为机电伺服系统的机械谐振频率;
S3:将待处理信号作为陷波滤波器的输入信号,将机械谐振频率作为陷波滤波器的中心频率,采用极值搜索算法,将陷波滤波器的宽度参数和深度参数均作为待搜索变量,并不断获取陷波滤波器的输出信号幅值,直至陷波滤波器的输出信号幅值达到最小;
S4:在控制器内添加陷波滤波单元,将输出信号幅值最小时的陷波滤波器的宽度参数和深度参数分别作为陷波滤波单元的宽度参数和深度参数,将机械谐振频率作为陷波滤波单元的中心频率,并通过该控制器对机电伺服系统进行控制。
本发明一种伺服系统用在线自适应陷波滤波器实现方法适用于伺服电机和负载连接的任何传动装置,不依赖于数学模型的准确性,只对谐振频率处的幅值进行在线检测,通用性强。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种伺服系统用在线自适应陷波滤波器实现方法
- 一种在线式自适应加工及涂覆系统及其实现方法