一种应用于电力廊道的植被采集装置
文献发布时间:2023-06-19 11:13:06
技术领域
本发明涉及电力廊道数据采集装置技术领域,特别是一种应用于电力廊道的植被采集装置。
背景技术
电力是基础工业之一,电力行业的发展水平直接影响整个国民经济的发展水平。电力传输系统的布置一般为高压架空电力线,但电力线及杆塔附件长期暴露在野外,因受到持续的机械张力、材料老化的影响而产生断股、磨损、腐蚀等损坏,导致事故,造成停电和经济损失。因此输电线路巡检是保证电力系统安全运行的一项基础工作,目的就在于掌握线路运行状况及其周围环境的变化、发现线路设备的缺陷及线路安全的隐患。
采用无人机搭载数据采集系统对电力廊道数据采集并进行数据后处理是一种常用的巡检方式。由于无人机所搭载的相机一般放置在底部,便于采集数据,但是当无人机所降落的底面不平或者有任何尖锐物体时,很容易会使相机受到损坏。
发明内容
本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
鉴于上述和/或现有的应用于电力廊道的植被采集装置中存在的问题,提出了本发明。
因此,本发明所要解决的问题在于如何解决现有的采集装置的相机容易受损。
为解决上述技术问题,本发明提供如下技术方案:一种应用于电力廊道的植被采集装置,其包括,无人机主体,其包括控制模块和传输模块;采集单元,设置于所述无人机主体下方,包括与所述无人机主体下表面固定连接的壳体、设置于所述壳体内部的多光谱相机、与所述多光谱相机配合的升降件,以及与挡板配合的收缩件,所述壳体底部设置有供所述多光谱相机进出开口,所述挡板用于遮挡所述开口;所述控制模块用于控制所述升降件和收缩件的启停,所述传输模块用于将所述多光谱相机采集的信息实时传输至上位机;所述升降件用于带动所述多光谱相机上下运动,所述收缩件用于带动所述挡板移动。
作为本发明所述应用于电力廊道的植被采集装置的一种优选方案,其中:所述升降件包括固定于所述无人机主体上的第一驱动电机、与所述第一驱动电机输出端连接的第一齿轮、与所述第一齿轮啮合的第二齿轮、与所述第二齿轮固定连接的第一螺纹杆、与所述第一螺纹杆螺纹配合的移动台,以及与所述移动台互动配合的第一辅助杆。
作为本发明所述应用于电力廊道的植被采集装置的一种优选方案,其中:所述收缩件包括固定在所述挡板一端的连接柱、设置于所述连接柱两端的第三齿轮、与所述第三齿轮通过同步带配合的第四齿轮、与所述第四齿轮固定连接的第一轴、与所述第一轴垂直连接的第二杆、与所述第二杆垂直连接的第三杆、与所述第三杆配合的轨道,以及带动所述第一轴和所述连接柱进行移动的驱动件。
作为本发明所述应用于电力廊道的植被采集装置的一种优选方案,其中:所述驱动件包括与所述第一轴和所述连接柱配合的移动块、与所述移动块螺纹配合的第二螺纹杆、与所述移动块滑动配合的第二辅助杆,以及与所述第二螺纹杆固定连接的第五齿轮。
作为本发明所述应用于电力廊道的植被采集装置的一种优选方案,其中:所述第五齿轮与所述第一齿轮啮合,所述第二螺纹杆与所述第一螺纹杆螺纹旋向相同。
作为本发明所述应用于电力廊道的植被采集装置的一种优选方案,其中:所述轨道包括与所述第三杆滑动配合的滑槽,所述滑槽包括竖直段和倾斜段,所述倾斜段设置于所述滑槽的底部,并且倾斜方向为朝向所述开口。
作为本发明所述应用于电力廊道的植被采集装置的一种优选方案,其中:当所述挡板处于竖直状态时,所述竖直段与所述第二杆平行。
作为本发明所述应用于电力廊道的植被采集装置的一种优选方案,其中:所述第三齿轮与所述第四齿轮齿数相同。
作为本发明所述应用于电力廊道的植被采集装置的一种优选方案,其中:所述采集单元还包括调节件,所述调节件包括与所述移动台配合的第一圆柱、与所述第一圆柱底端固定连接的角铁、带动所述第一圆柱进行旋转的第一旋转件,以及带动所述多光谱相机上下转动的第二旋转件。
作为本发明所述应用于电力廊道的植被采集装置的一种优选方案,其中:所述多光谱相机与所述角铁铰接,所述第二旋转件包括第二驱动电机,所述第二驱动电机输出端与所述多光谱相机连接,所述第一旋转件包括固定于所述移动台底面的第三驱动电机,第三驱动电机用于带动第一圆柱进行转动。
本发明有益效果为能够通过升降件使多光谱相机缩进壳体中,通过挡板将壳体挡住开口,对多光谱相机进行保护,使多光谱相机不会受到外界因素而造成损坏。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
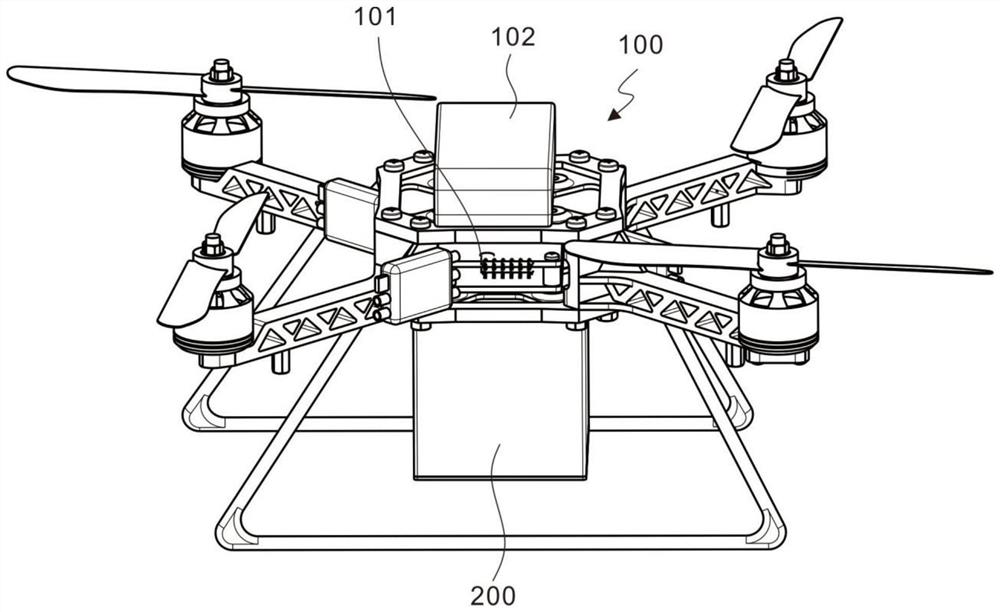
图1为实例1中应用于电力廊道的植被采集装置的结构图。
图2为实例1中应用于电力廊道的植被采集装置的部分采集单元结构图。
图3为实例1中应用于电力廊道的植被采集装置的收缩件俯视图。
图4为实例1中应用于电力廊道的植被采集装置的收缩件侧视图。
图5为实例1中应用于电力廊道的植被采集装置的收缩件局部视图。
图6为实例2中应用于电力廊道的植被采集装置的第一齿轮和第五齿轮啮合图。
图7为实例2中应用于电力廊道的植被采集装置的交替行进过程的调节件结构图。
具体实施方式
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合说明书附图对本发明的具体实施方式做详细的说明。
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例的限制。
其次,此处所称的“一个实施例”或“实施例”是指可包含于本发明至少一个实现方式中的特定特征、结构或特性。在本说明书中不同地方出现的“在一个实施例中”并非均指同一个实施例,也不是单独的或选择性的与其他实施例互相排斥的实施例。
实施例1
参照图1~5,为本发明第一个实施例,该实施例提供了一种应用于电力廊道的植被采集装置,应用于电力廊道的植被采集装置包括无人机主体100和采集单元200,采集单元200安装在无人机主体100下方,无人机主体100带动采集单元进行飞行,采集单元200采集电力廊道的植被信息。
具体的,无人机主体100包括控制模块101和传输模块102,控制模块101用于控制升降件203和收缩件204的启停,传输模块102用于将多光谱相机202采集的信息实时传输至上位机,此处所说的上位机是指地面上的监控室,需要说明的是,监控室也可以控制无人机的飞行路线和飞行方向。控制模块101采用单片机,传输模块102可以采用A7130芯片。
采集单元200包括与所述无人机主体100下表面固定连接的壳体201、设置于所述壳体201内部的多光谱相机202、与所述多光谱相机202配合的升降件203,以及与挡板201b配合的收缩件204,所述壳体201底部设置有供所述多光谱相机202进出开口201a,所述挡板201b用于遮挡所述开口201a,所述升降件203用于带动所述多光谱相机202上下运动,所述收缩件204用于带动所述挡板201b移动。
进一步的,所述升降件203包括固定于所述无人机主体100上的第一驱动电机203a、与所述第一驱动电机203a输出端连接的第一齿轮203b、与所述第一齿轮203b啮合的第二齿轮203c、与所述第二齿轮203c固定连接的第一螺纹杆203d、与所述第一螺纹杆203d螺纹配合的移动台203e,以及与所述移动台203e互动配合的第一辅助杆203f。第一辅助杆203f的作用是辅助移动台203e上下移动,使移动台203e不会跟随第一螺纹杆203d进行旋转。
优选的,所述收缩件204包括固定在所述挡板201b一端的连接柱204a、设置于所述连接柱204a两端的第三齿轮204b、与所述第三齿轮204b通过同步带204c配合的第四齿轮204d、与所述第四齿轮204d固定连接的第一轴204e、与所述第一轴204e垂直连接的第二杆204f、与所述第二杆204f垂直连接的第三杆204g、与所述第三杆204g配合的轨道204h,以及带动所述第一轴204e和所述连接柱204a进行移动的驱动件204j。
其中,所述轨道204h包括与所述第三杆204g滑动配合的滑槽204h-1,所述滑槽204h-1包括竖直段204h-11和倾斜段204h-12,所述倾斜段204h-12设置于所述滑槽204h-1的底部,并且倾斜方向为朝向所述开口201a。
较佳的,所述驱动件204j包括与所述第一轴204e和所述连接柱204a配合的移动块204j-1、与所述移动块204j-1螺纹配合的第二螺纹杆204j-2、与所述移动块204j-1滑动配合的第二辅助杆204j-3,以及与所述第二螺纹杆204j-2固定连接的第五齿轮204j-4。在本实施例中,通过另一个驱动电机与第五齿轮204j-4啮合,带动第五齿轮204j-4进行旋转。即,升降件203和收缩件204通过两个电机进行控制。
综上所述,多光谱相机202固定在移动台203e下方,移动台203e在升降件203的作用下可以缩进壳体201内和伸出壳体201外,挡板201b在收缩件204的作用下可以将开口201a挡住。
在使用时,无人机主体100飞行至电力廊道上空,通过控制模块101控制收缩件204进行工作,先使移动块204j-1向上移动,带动第三杆204g沿倾斜段204h-12进行移动,第二杆204f进行转动,带动第四齿轮204d,第三齿轮204b在同步带204c的作用下转动,带动挡板201b边向竖直状态转动边向上运动,当第三杆204g进入竖直段204h-11时,挡板201b停止转动,只做竖直运动,此时,挡板201b的位置应当不影响多光谱相机202的移动,当挡板201b完全缩回壳体201后,收缩件204停止工作,控制第一驱动电机203a启动,通过齿轮传动带动第一螺纹杆203d转动,使移动台203e向下移动,直至多光谱相机202完全伸出壳体201,然后就可以进行采集工作。
实施例2
参照图6和图7,为本发明第二个实施例,其不同于第一个实施例的是:所述第五齿轮204j-4与所述第一齿轮203b啮合,所述采集单元200还包括调节件205。在上一个实施例中,应用于电力廊道的植被采集装置包括无人机主体100和采集单元200,采集单元200安装在无人机主体100下方,无人机主体100带动采集单元进行飞行,采集单元200采集电力廊道的植被信息。
具体的,无人机主体100包括控制模块101和传输模块102,控制模块101用于控制升降件203和收缩件204的启停,传输模块102用于将多光谱相机202采集的信息实时传输至上位机,此处所说的上位机是指地面上的监控室,需要说明的是,监控室也可以控制无人机的飞行路线和飞行方向。控制模块101采用单片机,传输模块102可以采用A7130芯片。
采集单元200,设置于所述无人机主体100下方,包括与所述无人机主体100下表面固定连接的壳体201、设置于所述壳体201内部的多光谱相机202、与所述多光谱相机202配合的升降件203,以及与挡板201b配合的收缩件204,所述壳体201底部设置有供所述多光谱相机202进出开口201a,所述挡板201b用于遮挡所述开口201a,所述升降件203用于带动所述多光谱相机202上下运动,所述收缩件204用于带动所述挡板201b移动。
所述升降件203包括固定于所述无人机主体100上的第一驱动电机203a、与所述第一驱动电机203a输出端连接的第一齿轮203b、与所述第一齿轮203b啮合的第二齿轮203c、与所述第二齿轮203c固定连接的第一螺纹杆203d、与所述第一螺纹杆203d螺纹配合的移动台203e,以及与所述移动台203e互动配合的第一辅助杆203f。第一辅助杆203f的作用是辅助移动台203e上下移动,使移动台203e不会跟随第一螺纹杆203d进行旋转。
所述收缩件204包括固定在所述挡板201b一端的连接柱204a、设置于所述连接柱204a两端的第三齿轮204b、与所述第三齿轮204b通过同步带204c配合的第四齿轮204d、与所述第四齿轮204d固定连接的第一轴204e、与所述第一轴204e垂直连接的第二杆204f、与所述第二杆204f垂直连接的第三杆204g、与所述第三杆204g配合的轨道204h,以及带动所述第一轴204e和所述连接柱204a进行移动的驱动件204j。
所述轨道204h包括与所述第三杆204g滑动配合的滑槽204h-1,所述滑槽204h-1包括竖直段204h-11和倾斜段204h-12,所述倾斜段204h-12设置于所述滑槽204h-1的底部,并且倾斜方向为朝向所述开口201a。
所述驱动件204j包括与所述第一轴204e和所述连接柱204a配合的移动块204j-1、与所述移动块204j-1螺纹配合的第二螺纹杆204j-2、与所述移动块204j-1滑动配合的第二辅助杆204j-3,以及与所述第二螺纹杆204j-2固定连接的第五齿轮204j-4。
进一步的,所述第五齿轮204j-4与所述第一齿轮203b啮合,所述第二螺纹杆204j-2与所述第一螺纹杆203d螺纹旋向相同。这样设置的好处是仅通过一个电机,就可以控制升降件203和收缩件204进行工作,并且可以保证,不会出现在挡板201b未收缩的情况下令多光谱相机202向下伸出而导致多光谱相机202损坏。并且由于第五齿轮204j-4和第二齿轮203c均与第一齿轮203b啮合,故第五齿轮204j-4和第二齿轮203c旋旋相反,而此时所述第二螺纹杆204j-2与所述第一螺纹杆203d螺纹旋向相同,就可以使移动台203e和移动块204j-1反向运动。
为了便于叙述,先定义初始状态下,多光谱相机202设置于壳体201内,挡板201b将开口201a挡住。
需要说明的是,移动台203e和移动块204j-1在初始状态下,一个处于上端,一个处于下端。
较佳的,当所述挡板201b处于竖直状态时,所述竖直段204h-11与所述第二杆204f平行。并且所述第三齿轮204b与所述第四齿轮204d齿数相同。这样设置的好处是,第二杆204f与挡板201b会处于平行状态,当第二杆204f竖直,挡板201b也会竖直,当第二杆204f水平,挡板201b也会水平。
进一步的,所述采集单元200还包括调节件205,所述调节件205包括与所述移动台203e配合的第一圆柱205a、与所述第一圆柱205a底端固定连接的角铁205b、带动所述第一圆柱205a进行旋转的第一旋转件205c,以及带动所述多光谱相机202上下转动的第二旋转件205d,所述多光谱相机202与所述角铁205b铰接,所述第二旋转件205d包括第二驱动电机205d-1,所述第二驱动电机205d-1输出端与所述多光谱相机202连接,所述第一旋转件205c包括固定于所述移动台203e底面的第三驱动电机205c-1,第三驱动电机205c-1用于带动第一圆柱205a进行转动,可以采用蜗轮蜗杆的传动方式,第三驱动电机205c-1连接蜗杆,蜗轮连接在第一圆柱205a上。
综上所述,多光谱相机202固定在移动台203e下方,移动台203e在升降件203的作用下可以缩进壳体201内和伸出壳体201外,挡板201b在收缩件204的作用下可以将开口201a挡住,并且挡板201b和移动台203e通过同一个电机进行驱动,不会发生干涉,第一旋转件205c可以带动多光谱相机202竖直转动,第三驱动电机205c-1可以带动多光谱相机202水平转动。需要说明的是,控制模块101同样控制第三驱动电机205c-1和第二驱动电机205d-1的启停。
在使用时,无人机主体100飞行至电力廊道上空,通过控制模块101控制收缩件204和升降件203进行工作,控制第一驱动电机203a启动,通过齿轮传动带动第一螺纹杆203d转动,使移动台203e向下移动的同时,通过第二螺纹杆204j-2带动移动块204j-1向上运动,并且由于第三杆204g沿倾斜段204h-12进行移动,第二杆204f会发生转动,以致挡板201b跟随转动,当第三杆204g进入竖直段204h-11时,挡板201b停止转动,此时挡板201b同样处于竖直状态,在此过程中移动台203e处于一直下降的状态,直至多光谱相机202完全伸出壳体201,然后就可以进行采集工作,在采集工作时,第二驱动电机205d-1可以带动多光谱相机202竖直转动,第三驱动电机205c-1可以带动多光谱相机202水平转动,可以根据需要,控制多光谱相机202的朝向。
应说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
- 一种应用于电力廊道的植被采集装置
- 一种应用于生态廊道方面的植被墙