具有分布式电池的无人驾驶运输飞行器及其供电方法
文献发布时间:2023-06-19 11:14:36
相关申请的交叉引用
本申请要求在2018年9月11日提交的美国临时专利申请序列号62/729,839的权益,所述申请的内容以引用的方式整体并入本文。
技术领域
本公开总体涉及无人驾驶个人运输或货物运输飞行器,并且具体地,涉及由分布式电池供电的用于个人或货物运输的无人驾驶飞行器以及其供电方法。
背景技术
无人驾驶飞行器(UAV)或无人机是已知的。UAV大体上包括在其中或其上接纳的飞行结构、用于驱动发动机进行飞行的能量源、用于控制所述发动机的中央控制器、以及所需的其他部件。UAV可由远程操作员经由与中央控制器通信的远程控制进行操作,和/或由UAV上或远离所述UAV的飞行员程序自动或自主地操作。因此,在UAV与传统飞行器之间的根本区别在于UAV不具有在机上的任何人类飞行员。
UAV可由各种能量源供电,所述能量源诸如为电池、太阳能面板和/或燃料(例如,汽油、柴油等)。在现有技术电池供电型UAV中,其电池通常是可再充电的锂离子聚合物电池(还称为“锂聚合物(Li-Po)电池”)。虽然Li-Po电池重量轻,但它们大体上占据UAV中的大量空间,提供有限的飞行时间,并且需要长的再充电时间。
在现有技术电池供电型UAV中,其电池通常布置在中央控制器附近,并且可导致对中央控制器的部件的干扰。此类干扰可能在飞行前的校准期间和/或飞行期间出现,进而阻止UAV的适当操作或在飞行期间导致关键性UAV故障,诸如坠毁。
例如,已经观察到,处于高放电速率的电池可导致对磁力计的磁干扰,磁力计是常常位于中央控制器中或由中央控制器使用的部件。作为另一示例,虽然金属包覆型电池具有高能量密度和因此高能量存储容量的优势,但它们可能会导致对附近的中央控制器的显著的磁干扰,且因此在现有技术UAV中未得到使用。
发明内容
根据本公开的一个方面,公开了一种电池供电型多转子无人驾驶自主飞行器(AAV),其可以是个人运输无人机(PTD)、乘客运输无人机、货物运输飞行器等。电池供电型飞行器不需要机上的飞行员并且可自主地操作或可被远程地控制。
在一些实施方案中,电池供电型飞行器可以是用于运输人类乘客的自主飞行器。在一些其他实施方案中,电池供电型飞行器可以是用于运输多种物体的自主货物飞行器。在一些实施方案中,电池供电型飞行器可以是用于运输的远程控制的飞行器。
根据本公开的一个方面,所述电池供电型飞行器包括:中心单元;多个转子单元,所述多个转子单元围绕所述中心单元沿周向均匀地分布并且耦接到所述中心单元;以及一个或多个电池组件。所述中心单元包括中央控制电路。每个转子单元包括:螺旋桨;马达,所述马达耦接到所述螺旋桨并且驱动所述螺旋桨;以及电转速控制器(ESC)模块,所述电转速控制器模块电耦接到所述马达以用于控制所述马达的转速。所述一个或多个电池组件被配置为至少向所述马达和所述ESC模块供电,并且还可被配置为向所述中央控制电路供电。所述一个或多个电池组件中的每一者在转子单元中定位成接近或邻近于所述转子单元的马达。
因此,所述一个或多个电池组件与所述中央控制电路相距一定距离。一个或多个电池组件可原本对中央控制电路导致的干扰得到显著减少。
根据本公开的一个方面,公开了一种电池供电型飞行器,其包括:主体;中央控制电路,所述中央控制电路接纳在所述主体中;至少一个推进模块,所述至少一个推进模块接纳在所述主体中并且功能性地耦接到所述中央控制电路,所述至少一个推进模块中的每一者包括基座结构;以及一个或多个电池组件,所述一个或多个电池组件耦接到所述主体或接纳在所述主体中。
所述一个或多个电池组件被配置为至少向所述至少一个推进模块供电,并且所述一个或多个电池组件与所述中央控制电路相距一定距离,以便减少对所述中央控制电路的电磁干扰。
根据本公开的一个方面,公开了一种电池供电型飞行器,其包括:中心单元,所述中心单元包括中央控制电路;多个转子单元,所述多个转子单元围绕所述中心单元沿周向均匀地分布并且耦接到所述中心单元;以及一个或多个电池组件,所述一个或多个电池组件用于至少向马达和电转速控制器供电。每个转子单元包括:螺旋桨;电动马达,所述电动马达耦接到所述螺旋桨并且驱动所述螺旋桨;以及电转速控制器,所述电转速控制器电耦接到所述马达以用于控制所述马达的转速。所述一个或多个电池组件中的每一者在转子单元中定位成接近或邻近于所述转子单元的马达。
在一些实施方案中,所述飞行器包括用于飞行的推进模块、用于控制所述推进模块的中央控制电路、以及用于向所述推进模块和所述中央控制电路供电的一个或多个电池组件,诸如金属包覆型高能量密度电池组件和/或Li-Po电池,但在一些实施方案中,所述中央控制电路可具有其自身的电源。每个电池组件可包括一个或多个电池单元格。所述飞行器可由远程操作员经由与中央控制电路通信的远程控制进行操作,和/或由飞行器上或远离所述飞行器的飞行员程序自动或自主地操作。
在各种实施方案中,所述一个或多个电池组件与所述中央控制电路相距一定距离,以用于减少或消除对中央控制电路和其部件(诸如磁力计)的电磁干扰。
在一些实施方案中,所述飞行器是具有分布式电池组和至少一个ESC模块的电池供电型UAV。所述分布式电池组包括一个或多个电池组件,所述一个或多个电池组件以足以减少或消除对UAV中心控制器的部件的电磁干扰的距离远离所述UAV中心控制器而定位。
在一些实施方案中,UAV是电池供电型多轴或多转子UAV,诸如四轴飞行器(即,具有四个转子单元的无人机)、六轴飞行器(即,具有六个转子单元的无人机)、八轴飞行器(即,具有八个转子单元的无人机)等,其中在每个转子单元中,UAV包括电动马达,其中转子叶片或螺旋桨可旋转地耦接所述电动马达。分布式电池组的金属包覆型高能量密度电池组件被布置成邻近于每个转子单元(例如,在其下方),并且与所述转子单元机械地且电耦接以用于向电动马达供电。
在一些实施方案中,分布式电池组的每个电池组件定位成接近或邻近于马达,并且具有足以向那个马达提供所需的电力的容量。
在一些实施方案中,其中UAV包括多个连接臂,每个连接臂在其远端处支撑马达,其中每个电池组件围绕相应连接臂的远端而定位,诸如耦接到马达或围绕连接臂的远端耦接到所述连接臂,以用于向马达供电。
在一些实施方案中,每个电池组件还可充当支撑腿,或者是支撑腿的一部分,或附接到支撑腿。
在一些实施方案中,其中每个马达安装在基座结构上,每个电池组件还耦接到相应的基座结构。当然,本领域技术人员将了解,在一些实施方案中,电池组件的位置可以是本文描述的位置的组合。例如,一些电池组件可作为支撑腿位于相应马达的下方,并且一些其他电池组件可位于连接臂中。
在一些实施方案中,每个ESC模块位于相应的马达附近,并且电耦接到相应的电池组件和相应的马达以用于向所述马达供电并且控制所述马达的转速,进而与常规的UAV相比导致在马达与ESC模块之间的短得多的电气布线以及在电池与ESC模块之间的更短的电气布线,在常规的UAV中,ESC模块远离电池或远离马达而定位。在电池组件与ESC模块之间的这些短电气布线减少了原本由所述布线在动态马达转速变化期间所引起的电噪声和变化,进而降低ESC模块故障的概率。在电池与ESC模块之间以及在ESC模块与马达之间的这些短电气布线导致更低的UAV重量。
本领域技术人员将了解,由于置于马达上的不均匀的负荷,电池消耗在所有电池组件上可能不是均匀的(即,电池组件可能不是被均匀消耗的)。在一些实施方案中,使用电池功率平衡来平衡每个电池组件的功率消耗,并且用于使电池组件的使用期限最大化。在一些实施方案中,可使用无源平衡。在一些其他实施方案中,可使用有源平衡。在又一些其他实施方案中,可使用电池管理系统(BMS)。依据实现方式,BMS可包括有源平衡、温度监测、充电以及其他合适的电池管理功能。
根据本公开的一个方面,公开了一种电池供电型飞行器,其包括:中心单元,所述中心单元包括舱,其用于在其中接纳一个或多个乘客和/或货物物品;一个或多个转子单元,所述一个或多个转子单元耦接到所述中心单元;一个或多个电池组件;以及多个电路部件,所述多个电路部件包括中央控制电路和由所述中央控制电路控制的至少飞行控制子系统、检测和回避子系统和紧急通信子系统,所述多个电路部件中的一者或多者接纳在所述中心单元中。所述一个或多个转子单元包括一个或多个推进模块,所述一个或多个推进模块功能性地耦接到所述中央控制电路;所述一个或多个电池组件被配置为由所述飞行控制子系统控制以便至少向所述一个或多个推进模块供电;并且所述一个或多个电池组件与所述中心单元相距一定距离以便减少对所述中心单元中的所述电路部件中的一者或多者的电磁干扰。
在一些实施方案中,所述多个电路部件中的一者或多者接纳在舱的上部部分中;并且所述一个或多个电池组件中的至少一者接纳在舱的下部部分中。
在一些实施方案中,所述一个或多个电池组件中的至少一者接纳在位于舱的底板下方的舱的下部部分中。
在一些实施方案中,所述一个或多个转子单元耦接到所述中心单元的下部部分。
在一些实施方案中,所述一个或多个转子单元耦接到所述中心单元的上部部分。
在一些实施方案中,电池供电型飞行器还包括一个或多个支撑腿;并且所述一个或多个支撑腿中的至少一者包括所述一个或多个电池组件中的至少一者。
在一些实施方案中,所述一个或多个电池组件中的至少一者位于转子单元中并且被配置为充当支撑腿。
在一些实施方案中,电池供电型飞行器还包括多个支撑腿;并且所述一个或多个电池组件中的至少一者在所述多个支撑腿中的两者之间延伸。
在一些实施方案中,所述多个支撑腿中的至少一者从所述一个或多个转子单元中的一者向下延伸。
在一些实施方案中,所述电池供电型飞行器包括多个转子单元;并且所述一个或多个电池组件中的至少一者在所述多个转子单元中的两者之间延伸。
在一些实施方案中,所述一个或多个电池组件中的至少一者从所述一个或多个推进模块中的至少一者向下延伸。
在一些实施方案中,所述一个或多个转子单元经由一个或多个耦接部件耦接到所述中心单元。
在一些实施方案中,所述一个或多个耦接部件中的每一者是连接臂。
在一些实施方案中,所述电池组件从所述耦接部件向下延伸。
在一些实施方案中,所述电池供电型飞行器还包括笼状物;所述一个或多个电池组件中的至少一者形成所述笼状物的一部分。
在一些实施方案中,所述电池供电型飞行器还包括笼状物;并且所述一个或多个电池组件中的至少一者接纳在所述笼状物中。
在一些实施方案中,所述笼状物位于舱下方。
在一些实施方案中,所述多个电路部件还包括备用中央控制电路。
在一些实施方案中,所述多个电路部件还至少包括所述中心单元中的磁力计。
在一些实施方案中,所述一个或多个电池组件中的至少一者包括一个或多个金属包覆型电池单元格。
在一些实施方案中,所述一个或多个电池组件中的每一者接近或邻近于所述一个或多个推进模块中的一者;并且所述中央控制电路与所述一个或多个推进模块相距所述距离。
在一些实施方案中,所述中央控制电路包括用于平衡所述一个或多个电池组件的功率消耗速率的电池功率平衡电路。
在一些实施方案中,所述一个或多个推进模块中的每一者包括:电动马达,所述电动马达耦接到基座结构;螺旋桨,所述螺旋桨可旋转地耦接到所述电动马达;以及电转速控制器,所述电转速控制器耦接到所述基座结构并且电耦接到所述电动马达以用于控制所述电动马达的转速。
在一些实施方案中,所述一个或多个推进模块中的至少一者的螺旋桨位于所述电动马达上方。
在一些实施方案中,所述一个或多个推进模块中的至少一者的螺旋桨位于所述电动马达下方。
在一些实施方案中,所述多个电路部件还包括飞行管理子系统。
在一些实施方案中,所述飞行控制子系统和所述飞行管理子系统被配置为自动控制管理电池供电型飞行器的飞行。
在一些实施方案中,所述多个电路部件还包括通信子系统(例如,用于音频/视频通信和/或数据通信)和功率管理子系统。
在一些实施方案中,所述多个电路部件还包括气候控制子系统、家具控制子系统、娱乐子系统以及预订和支付子系统。
在一些实施方案中,所述多个电路部件还包括至少飞行控制子系统、检测和回避子系统以及紧急通信子系统的一个或多个备用子系统。
附图说明
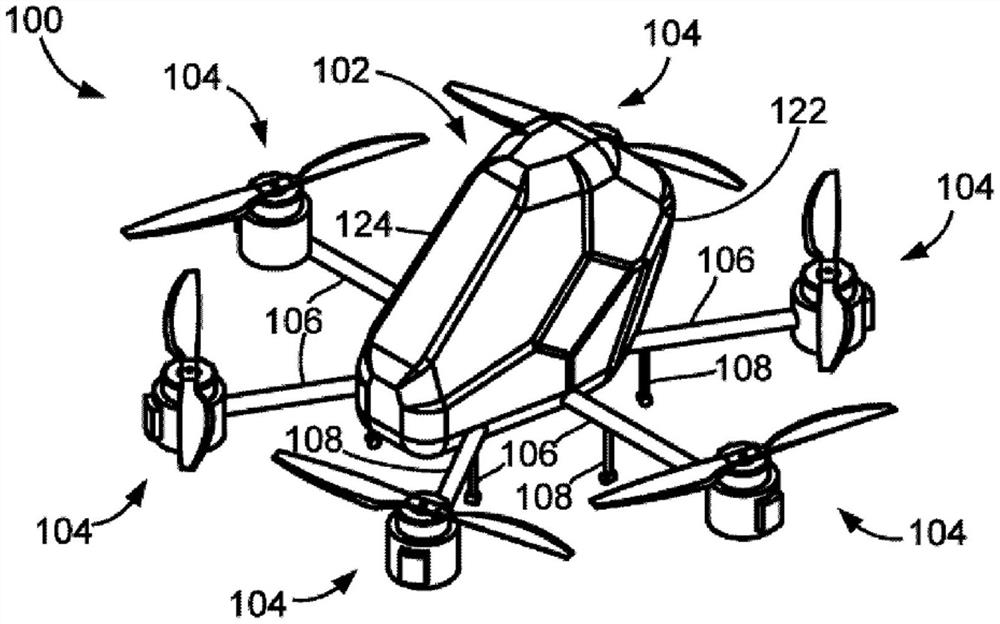
图1A是根据本公开的一些实施方案的具有中心单元和多个转子单元的电池供电型多转子无人驾驶个人运输飞行器的透视图;
图1B和图1C分别是在图1A中示出的飞行器的前视图和平面图;
图2是在图1A中示出的飞行器的乘客舱的透视图;
图3是在图1A中示出的飞行器的转子单元的透视图;
图4是在图1A中示出的飞行器的支撑腿的透视图;
图5是示出对在图1A中示出的飞行器的供电的示意性电气图;
图6是示出根据本公开的一些替代性实施方案的对在图1A中示出的飞行器的供电的示意性电气图;
图7是示出在图1A中示出的飞行器的子系统的示意图;
图8A至图8C分别是根据本公开的一些替代性实施方案的具有中心单元和多个转子单元的电池供电型多转子无人驾驶个人运输飞行器的透视图、前视图和平面图;
图9A至图9C分别是根据本公开的一些替代性实施方案的具有中心单元和多个转子单元的电池供电型多转子无人驾驶货物运输飞行器的透视图、前视图和平面图,其中舱位于实质上在连接臂的平面的下方的高程处;
图10是根据本公开的又一些替代性实施方案的具有中心单元和多个转子单元的电池供电型多转子无人驾驶货物运输飞行器的透视图;
图11是在图10中示出的飞行器的转子单元的透视图;
图12是在图11中示出的转子单元的透视分解图;
图13A至图13H示出在图11中示出的转子单元的基座结构,其中
图13A是从第一观看角度观看的基座结构的透视图,
图13B是从第二观看角度观看的基座结构的透视图,
图13C至图13G分别是基座结构的前视图、后视图、平面图、仰视图和侧视图,并且
图13H是基座结构的示意性横截面视图;
图14A至图14E示出在图11中示出的转子单元的电池组件的壳体,其中
图14A是从第一观看角度观看的电池壳体的透视图,
图14B是从第二观看角度观看的电池壳体的透视图,
图14C和图14D分别是电池壳体的侧视图和前视图,并且
图14E是电池壳体的示意性横截面视图;
图15是在图11中示出的转子单元的一部分的示意性横截面视图,其绘示了其电连接;
图16是根据本公开的再一些替代性实施方案的电池供电型多转子无人驾驶货物运输飞行器的透视图,其中所述飞行器包括中心单元和六个转子单元;
图17是根据本公开的再一些替代性实施方案的电池供电型多转子无人驾驶货物运输飞行器的透视图,其中所述飞行器包括中心单元和八个转子单元;
图18是根据本公开的再一些替代性实施方案的电池供电型多转子无人驾驶货物运输飞行器的透视图,其中所述飞行器包括中心单元、具有电池组件的四个转子单元和不具有电池组件的四个转子单元;
图19A是根据本公开的再一些替代性实施方案的电池供电型多转子无人驾驶货物运输飞行器的透视图,其中所述飞行器包括中心单元、各自具有支撑腿的四个转子单元以及作为所述支撑腿之间的横杆的四个电池组件;
图19B是根据本公开的再一些替代性实施方案的电池供电型多转子无人驾驶货物运输飞行器的透视图,其中所述飞行器包括中心单元、各自具有支撑腿的四个转子单元以及作为转子单元的基座结构之间的连接臂的四个电池组件;
图19C是根据本公开的一些替代性实施方案的电池供电型多转子无人驾驶货物运输飞行器的透视图,其中所述飞行器包括中心单元、各自具有支撑腿的四个转子单元以及由连接臂和支撑腿形成的笼状物,所述笼状物包括电池组件;
图19D是根据本公开的一些替代性实施方案的电池供电型多转子无人驾驶货物运输飞行器的透视图,其中所述飞行器包括具有舱的中心单元、以及六个转子单元,每个转子单元都具有支撑腿并且耦接到所述舱的下部部分,所述舱包括位于其上部部分中的至少一些电气部件和位于其下部部分中的电池组件;
图19E是根据本公开的一些替代性实施方案的电池供电型多转子无人驾驶货物运输飞行器的透视图,其中所述飞行器包括具有舱的中心单元,位于所述舱下方的笼状物、以及六个转子单元,每个转子单元都具有支撑腿,所述中心单元的所述舱包括位于其上部部分中的至少一些电气部件,并且所述笼状物包括电池组件;
图19F是根据本公开的一些替代性实施方案的电池供电型多转子无人驾驶货物运输飞行器的透视图,其中所述飞行器包括具有舱和多个支撑腿的中心单元、以及六个转子单元,所述六个转子单元耦接到所述舱的上部部分,所述舱包括位于其上部部分中的至少一些电气部件和位于其下部部分中的电池组件;
图20A至图22E示出一些替代性实施方案中的电池组件的各种配置;
图23A和图23B示出根据一些替代性实施方案的电池组件的各种配置,其中转子单元包括转子组件,所述转子组件被配置为具有位于电动马达下方的叶片的推动器;
图24A和图24B示出根据一些替代性实施方案的电池组件的各种配置,其中转子单元包括两个转子组件,其中一个转子组件被配置为具有位于电动马达上方的叶片的拉动器,并且另一转子组件被配置为具有位于电动马达下方的叶片的推动器;
图25是根据本公开的一些替代性实施方案的电池供电型无人驾驶货物运输飞行器的示意图,其中UAV包括驱动一个螺旋桨的一个马达;
图26是根据本公开的一些替代性实施方案的电池供电型固定翼双机身无人驾驶(个人或货物)运输飞行器的示意性透视图,其中每个机身包括电池组件;
图27是根据本公开的一些替代性实施方案的固定翼双机身无人驾驶(个人或货物)运输飞行器的示意性透视图,其中所述固定翼的每一侧区段都包括电池组件;
图28是根据一些替代性实施方案的包括四个电池组件的固定翼双机身无人驾驶(个人或货物)运输飞行器的示意性透视图;
图29是根据一些替代性实施方案的包括两个电池组件的固定翼单机身无人驾驶(个人或货物)运输飞行器的示意性透视图;以及
图30是根据一些替代性实施方案的包括三个电池组件的固定翼单机身无人驾驶(个人或货物)运输飞行器的示意性透视图。
具体实施方式
转向图1A至图1C,电池供电型(个人或货物)运输飞行器被示出,并且大体上使用参考数字100来识别。在这些实施方案中,电池供电型飞行器100是电池供电型多转子个人运输无人机(PTD)或飞行器、乘客运输无人机或飞行器、货物运输无人机或飞行器、或自主飞行器(AAV)。
飞行器100可用于在本地区域(诸如通常繁忙并且缺乏用于地面车辆的停车位的市中心)中将乘客和/或物品从屋顶运输至屋顶或从屋顶运输至街面。飞行器100可用于将乘客和/或物品从市中心运输至郊区并返回、从城市运输至农村并返回、或在城市之间运输。在一些实施方案中,电池供电型飞行器100不需要机上的飞行员并且可自主地操作或可被远程控制。
如图1A至图1C中所示,飞行器100包括中心单元102和多个大体上相同的转子单元104,所述转子单元围绕中心单元102大体上均匀地分布并且经由多个耦接部件106(诸如连接臂)耦接到所述中心单元。
飞行器100包括多个支撑腿108,所述多个支撑腿从耦接部件106和/或中心单元102向下延伸,以用于在飞行器100着陆在表面上时支撑飞行器100。在这些实施方案中,每个支撑腿108在其远端处包括轮,以用于着陆在表面上并且在所述表面上移动。本领域技术人员将了解,在其他实施方案中,支撑腿108可包括其他合适的着陆部件,诸如滑雪橇、起落架、机架、浮板等等,以用于着陆在各种类型的表面上,诸如实地、雪地、水等等。
在本文,术语“近端”是指朝向中心单元102的一侧或一端,并且术语“远端”是指与所述近端侧或端相对并且远离中心单元102的一侧或一端。
如图2中所示,中心单元102包括乘客舱122(还称为机舱或驾驶舱),所述乘客舱具有足够的强度以在其中容纳和保护一个或多个乘客。在这些实施方案中,中心单元102包括座舱罩124,所述座舱罩实质上由诸如玻璃的透明材料制成,以用于向其中的乘客提供大体上无障碍的视野。座舱罩124能够围绕其端部枢转,以充当用于允许乘客入(进入或外出)舱122的门或闸。本领域技术人员将了解,依据舱122的大小和乘客的数目,在其他实施方案中,舱122可包括用于入舱122的一个或多个门和/或用于向其中的乘客提供大体上无障碍的视野的一个或多个窗户。
虽然在图2中未示出,但在各种实施方案中,舱122可在其中包括多种设备。例如,舱122可包括一个或多个传感器诸如磁力计以及供乘客使用的娱乐和舒适设备,诸如座椅、桌子、相机等等。还使用必需的安全约束装置,诸如安全带和/或安全气囊。
虽然飞行器100不需要任何飞行员,但在一些实施方案中,舱122可仍然包括诸如仪表板的控制台,具有一个或多个显示装置和通信装置以供乘客观看并且与诸如空中交通管制人员等遥远的人通信。在一些实施方案中,舱122至少包括紧急通信装置,以用于在紧急情形下寻求帮助。舱122还包括中央控制电路,以用于控制飞行器100的各种功能装置或子系统(稍后更详细地描述)。
在一些实施方案中,控制台还可包括输入装置,诸如触敏显示器,以供乘客或用户输入命令,诸如出发、着陆、改变飞行计划等。所述输入装置还可由用户使用以便控制舱122中和/或周围的娱乐设备。
图3示出了转子单元104中的一者。如图示,转子单元104包括电动推进模块130,所述电动推进模块经由连接臂106耦接到中心单元102,所述连接臂具有圆柱形形状或立方体形状或其他合适的形状。支撑腿108与中心单元102相距一定距离而定位,并且从连接臂106向下延伸以用于在飞行器100着陆在表面上时支撑飞行器100。
推进模块130包括推进模块壳体结构132,所述推进模块壳体结构在其中接纳和安装动力传动系统,所述动力传动系统具有转子组件134、电转速控制器(ESC)模块(未示出)以及其他必需的部件,诸如变速器和/或一个或多个传感器(稍后描述)。推进模块壳体结构132还充当安装基座,以用于耦接到连接臂106,以便将推进模块130安装到中心单元102。
转子组件134包括驱动螺旋桨或其上的叶片138的电动马达136。此类螺旋桨配置大体上表示为拉动器配置,因为所述螺旋桨在操作中“拉动”转子单元104和因此飞行器100离开着陆表面。ESC模块电耦接到电动马达136以便控制所述电动马达的转速。
如图4中所示,支撑腿108包括腿壳体152,所述腿壳体具有耦接到其远端的轮154,以用于将飞行器100支撑在实体表面上以及使飞行器在所述实体表面上移动。腿壳体152是中空立方体或圆柱体,并且在其中接纳电池组件156,所述电池组件电耦接到中心单元102和一个或多个转子单元104以便向其提供电力。
电池组件156包括一个或多个高能量密度电池单元格158,所述一个或多个高能量密度电池单元格可以是任何合适的电池单元格,诸如金属包覆型电池、锂离子电池、锂离子聚合物(Li-Po)电池等。例如,在这些实施方案中,由于使用包覆金属作为连接器的金属包覆型电池的高能量存储量和小尺寸,所以使用金属包覆型电池。
在一些实施方案中,每个电池组件156向一般需要高功率输出来操作螺旋桨138的相邻转子单元104的电动马达136和ESC模块供电。另一方面,中心单元102中的电气装置和传感器一般需要小功率输出进行操作,并且可由单独的一组或多组电池供电。
在一些实施方案中,飞行器100包括(例如)在中心单元102中的功率平衡板,以用于调整电池组件156的功率输出,以便平衡电池组件的功率消耗速率。
图5是示出对飞行器100的转子单元104的功率管理的示意性电气图172,其中具有较厚宽度的线路174表示电力线,并且具有较窄宽度的线路176(包括线路176A和176B)表示信号线。
如图示,每个转子单元104的马达136、ESC模块178和电池组件156电耦接到中心单元102中的中央控制电路182。中央控制电路182包括飞行控制模块184和功率平衡板186。飞行控制模块184确定飞行器100的飞行状态并且相应地调整螺旋桨138。具体地,飞行控制模块184经由信号线176A控制每个转子单元104中的ESC模块178以调整每个马达136的转速,从而单独地控制对应的螺旋桨138的转速。
功率平衡板186监测每个电池组件156的功率输出,并且单独地且动态地调整其功率输出,使得所有电池组件156都可具有类似的功率消耗速率。
在此实施方案中,所有电池组件156在功率平衡板186中并联地互连。因此,具有较高能量存储的电池组件156将对具有较低能量存储的电池组件进行充电。因此,所有电池组件156实现相同的功率消耗速率。
在如图6中所示的另一实施方案中,所有电池组件156都电耦接到功率平衡板186,并且功率平衡板186将电力从电池组件156分配到每个ESC模块178和马达136。
在此实施方案中,功率平衡板186监测每个电池组件156的功率消耗,并且使用配电板(PDB)188动态地调整配电。因此,经历重负荷的马达136可由一个以上电池组件156供电。另一方面,具有高剩余能量存储的电池组件156可具有高功率消耗速率(例如,向具有重负荷的马达136供电和/或向一个以上马达136供电),直到其剩余能量存储与其他电池组件156的剩余能量存储大致相同为止。可替代地,功率平衡板186可监测每个电池组件156的功率消耗,并且使用具有较高能量存储的电池组件156向具有较低能量存储的那些电池组件156进行充电。功率平衡板186还可监测电池组件156的充电以防止过热和/或过度充电。
在替代性实施方案中,每个电池组件156经由同一转子单元104中的ESC模块178并且经由无源功率平衡电路(诸如可调整电阻器(未示出))向其相应马达136供电。功率平衡板186监测每个电池组件156的功率消耗,并且动态地调整可调整电阻器的电阻,使得所有电池组件156都具有相同的负荷。此方法的缺点在于,由可调整电阻器消耗的功率作为热量被浪费。
在一些实施方案中,飞行器100包括分布在中心单元102和转子单元104中的多种功能装置或子系统。
图7是示出飞行器100的功能结构的框图。如图示,在需要时,一个或多个传感器192分布在中心单元102和/或一个或多个转子单元104之上或之中,所述一个或多个传感器诸如为射频(RF)收发器、全球定位系统(GPS)接收器、具有加速度计和陀螺仪的惯性测量单元(IMU)、气压计、磁力计、温度传感器、摄像机、雷达检测器、传声器等等。
传感器192全部电(或光学地(在使用光学通信构件的情况下))连接到中心单元102中的中央控制电路182。中央控制电路182还电连接到中心单元102中的多个子系统,诸如通信子系统194(例如,用于音频/视频通信和/或数据通信)、紧急通信子系统196、飞行控制子系统198、飞行管理子系统200、功率管理子系统202、检测和回避子系统204、气候控制子系统206、家具控制子系统208、娱乐子系统210、预订和支付子系统212和/或其他合适的子系统。
通信子系统194建立并维持在飞行器100与远程系统(诸如UAS交通管理(UTM)系统)之间的通信,以用于在其间传输数据和命令。通信子系统196还建立并维持在飞行器100中的乘客与远程系统(诸如电话系统)之间的音频/视频通信。
紧急通信子系统196在紧急情况下在飞行器100与远程系统(诸如UTM系统、救援系统、警察系统等等)之间建立并维持通信。
飞行控制子系统198连接到转子单元104的ESC模块178,以用于控制马达136的操作来调整飞行状态。飞行控制子系统198包括在图5和图6中示出的飞行控制器184。
飞行管理子系统200管理飞行器100的飞行操作,诸如目的地、飞行路线、出发时间、到达时间等等。飞行管理子系统200可与UTM系统通信以进行飞行管理。飞行管理子系统200还可为乘客提供用户界面(经由舱中的显示器)以与UTM人员进行交互,以便规划、监测和/或修改飞行,诸如输入新的目的地、修正飞行细节(例如,绕行)、报告通知UTM人员协调/动作等。
飞行控制子系统198和飞行管理子系统200可表示为“机载自动驾驶仪”,其可在没有人类飞行员介入的情况下自动控制和管理飞行器100的飞行。
功率管理子系统202连接到转子单元104的电池组件156以用于管理所述电池组件的功率输出。功率管理子系统202包括在图5和图6中示出的实施方案的功率平衡板186。
检测和回避子系统204使用飞行器100上的合适的传感器和通信构件来检测和回避其他飞行器和物体。例如,检测和回避子系统204可使用广播式自动相关监视(ADS-B)来检测和回避使用相同或兼容的技术的“合作”飞行器,并且使用诸如雷达等传感器来检测和回避“非合作”的飞行器和物体。
检测和回避子系统204还可包括至机载自动驾驶仪(飞行控制子系统198和飞行管理子系统200)的接口并且与所述机载自动驾驶仪集成,以操纵飞行器100进行碰撞回避并且在需要时执行实时路线规划/修改。
检测和回避子系统204维持与机载自动驾驶仪的实时通信以进行UTM引导的飞行规划。在飞行器100是由地面控制台远程控制的实施方案中,检测和回避子系统204维持与地面控制台处的任务控制领航员的实时通信以进行UTM引导的飞行规划。在一些实施方案中,检测和回避子系统204维持与机载自动驾驶仪和地面控制台处的任务控制领航员两者的实时通信以进行UTM引导的飞行规划。
检测和回避子系统204还包括着陆检测和回避功能,以通过以下操作确保着陆期间的安全性:使用必需的传感器(诸如视觉/红外相机、光检测和测距(LIDAR)传感器等等)来检测着陆位置处或周围的物体或人。
气候控制子系统206控制和调整舱122中的环境状况,诸如温度、空气压力、空气清新等等,以为乘客提供舒适的环境。
家具控制子系统208允许乘客调整舱122中的家具的状况,诸如桌子和/或座椅的高度、位置、倾斜度等等。
娱乐子系统210向乘客提供娱乐。娱乐子系统210还可提供广告。
预订和支付子系统212允许乘客预订航班(诸如输入新的目的地、确认航班预定的细节等),并且作出所需的支付。预订和支付子系统212还可与航班预定应用相关联,以有助于乘客预订航班并进行支付。
如图7中所示,中心单元102还可包括与一个或多个飞行和/或安全相关子系统相对应的备用传感器和子系统214,使得当对应的安全相关子系统出故障时,一个或多个备用传感器和子系统214可自动或手动地代替所述安全相关子系统,所述一个或多个飞行和/或安全相关子系统诸如为马达136、ESC 178、电池组件156、紧急通信子系统196、飞行控制子系统198、飞行管理子系统200、功率管理子系统202、检测和回避子系统204。
备用传感器和子系统214向飞行器100提供附加的冗余以实现导航/飞行可靠性和安全性。在一些实施方案中,飞行器100的传感器和子系统(包括所有备用传感器和子系统)是高标准商业级(例如,商业级自动驾驶仪或被证明的自动驾驶仪),其具有用于实现与通用航空或商业航空相当的安全水平的双重冗余或三重冗余。另外,飞行器100一般使用较高质量的部件、具有已知的低故障率的部件以实现提高的可靠性。飞行器100还可包括对诸如马达136和ESC 178等关键飞行部件的机载故障预测。
在以上实施方案中,飞行器100是电动的并且使用电池组件156作为电源。在一些替代性实施方案中,飞行器100可使用具有化石燃料提供动力的发动机/发电机的混合动力传动系统以实现延长的飞行距离。例如,在一个实施方案中,飞行器100可包括汽油发动机,以用于驱动发电机对电池组件156进行充电。
图8A至图8C示出一些替代性实施方案中的飞行器100。这些实施方案中的飞行器100与在图1A至图1C中示出的飞行器大体上相同,不同之处在于,在这些实施方案中,螺旋桨138位于相应的马达136(即,推动器配置)下方,以用于将飞行器100“推动”离开地面。
在一些实施方案中,在需要时电池供电型飞行器100可以可替代地由乘客中的一者作为飞行员来手动地操作。
在以上实施方案中,舱122位于实质上在连接臂106的平面上方的高程处(所谓的“下部附接”)。在一些替代性实施方案中,舱122可位于相对于连接臂106的平面的任何其他合适的高程处。
例如,图9A至图9C示出一些替代性实施方案中的飞行器100。这些实施方案中的飞行器100与在图1A至图1C中示出的飞行器大体上相同,不同之处在于,在这些实施方案中,舱122位于实质上在连接臂106的平面下方的高程处(所谓的“上部附接”)。
虽然在以上实施方案中电池供电型飞行器100是用于运输乘客的个人运输无人机,但在一些替代性实施方案中,电池供电型飞行器100可以是用于载运和/或运输物品和/或合适的物体的货物运输无人机。这些实施方案中的舱122是用于在运输期间容纳物品的货物舱。
图10示出了用于运输大体上小型或中等重量的物品的多转子电池供电型货物飞行器100。在这些实施方案中,飞行器100包括中心单元102和多个转子单元104,所述转子单元围绕中心单元102大体上均匀地分布并且经由多个耦接部件106(诸如连接臂)耦接到所述中心单元。例如,在图10中示出的多转子UAV 100是具有中心单元102和四个大体上相同的转子单元104的所谓的四轴飞行器。
中心单元102包括用于容纳物品的舱(未示出)。所述舱可位于相对于连接臂106的平面的任何其他合适的高程处。例如,在这些实施方案中,所述舱位于实质上在连接臂106的平面下方的高程处。
图11和图12示出转子单元104中的一者。如图示,转子单元104包括:电动推进模块130,所述电动推进模块经由耦接部件106(诸如圆柱形连接臂)耦接到中心单元102;以及电池组件156,所述电池组件物理地且电耦接到推进模块130以用于向其提供电力。推进模块130包括基座结构232作为用于接纳和安装转子组件134和ESC模块178的安装基座。基座结构232还耦接到连接臂106以用于将推进模块130安装到中心单元102。
转子组件134包括电动马达136以及由电动马达136驱动的螺旋桨或叶片138。ESC模块178电耦接到电动马达136以用于控制所述电动马达的转速。
电池组件156包括电池仓或壳体234以及一个或多个高能量密度电池单元格158,所述一个或多个高能量密度电池单元格接纳在电池壳体234中以用于向ESC模块178和电动马达136提供电力。电池单元格158可以是任何合适的电池单元格,诸如金属包覆型电池、锂离子电池、锂离子聚合物(Li-Po)电池等。
图13A至图13H示出了基座结构232的细节。如图示,基座结构232包括“L”形主体236,所述主体在其顶表面240上具有圆形凹部238以用于接纳转子组件134的马达136。基座结构232还包括臂连接器,所述臂连接器在主体236的近侧或后侧244上从所述主体的后表面242延伸以用于耦接到连接臂106。
在远侧或前侧246上,主体236包括狭槽,所述狭槽从前表面248向内延伸到主体236中并且与前侧开口形成腔室250以用于接纳ESC模块178。主体236还包括一对上部通道或凹槽252和一对下部通道或凹槽254以用于在电池组件156中滑动并且耦接所述电池组件。
图13H是基座结构232的示意性横截面视图。如图示,基座结构232的主体236包括围绕腔室250的三组电接触端子262、264和266。
第一组电接触端子262从圆形凹部238延伸到腔室250中,以用于把将要位于其上方的马达136的对应的电端子(在图13H中未图示;参见图15)电耦接到将要位于其下方的ESC模块178的对应的电端子(在图13H中未图示;参见图15)。因此,第一组电接触端子262被配置为将马达136电耦接到ESC模块178。
第二组电接触端子264位于腔室250的近端244’处,以用于电耦接到ESC模块178的对应的电端子(在图13H中未图示;参见图15)。第二组电接触端子264还电耦接到一组导电线268,所述一组导电线延伸穿过臂连接器和连接臂106(在图13H中未图示;参见图15)到达中心单元102,并且电耦接到所述中心单元中的中央控制电路182的飞行控制模块184(类似于图5和图6,在稍后更详细地描述)。因此,所述第二组电接触端子264和电线268被配置为将ESC模块178电耦接到中心单元102中的中央控制电路182。
第三组电端子266定位成接近或邻近于上部通道252的近端244’,以用于电耦接到电池组件156的对应的电端子(在图13H中未图示;参见图15)。第三组电接触端子266还电耦接到一组导电线270,所述一组导电线延伸穿过臂连接器和连接臂106(在图13H中未图示;参见图15)到达中心单元102,并且电耦接到所述中心单元中的中央控制电路182的功率平衡板186(参见图6和图7)。因此,所述第三组电接触端子266和电线270被配置为将电池组件156电耦接到中心单元102中的中央控制电路182。
图14A至图14E示出电池组件156的电池壳体234。在此实施方案中,电池壳体234是由诸如钢、刚性塑料等刚性材料制成。电池壳体234包括头部部分282和主体284。头部部分282包括与基座结构232的上部通道252匹配的一对上部轨道或脊状物286,以及与所述基座结构的下部通道254匹配的一对下部轨道或脊状物288。电池壳体234的主体284具有中空腔室290和可移除的底壁292以用于接纳一个或多个电池单元格158。在另一实施方案中,电池壳体234包括固定的底壁292和可移除的头部部分282。
图14E是电池壳体234的示意性横截面视图。如图示,电池壳体234的头部部分282包括经由合适的布线308彼此电互连的三组电接触端子302、304和306。
第一组电接触端子302被配置为电耦接到电池单元格的腔室290中的电池单元格。第二组电接触端子304被配置为电耦接到将要位于其上方的ESC模块178。第三组电接触端子306被配置为电耦接到基座结构232中的第三组电端子266。
再次参看图12,为了组装飞行器100,螺旋桨138耦接到电动马达136的轴,所述轴通过合适的紧固构件(诸如螺丝、钉子、胶水等)安装到基座结构232上。ESC模块178滑动到基座结构232的腔室250中。
为了组装电池组件156,经由电池壳体234的可移除的底壁292将一组电池单元格158插入到所述电池壳体中。组装好的电池组件156随后通过以下操作耦接到基座结构232:使电池壳体234的头部部分282滑动到基座结构232中并且使头部部分282的轨道286和288分别与通道252和254接合。在将马达136、ESC模块178和电池组件156安装到基座结构232之后,它们还电互连。随后,连接臂106耦接到基座结构232的臂连接器,并且使布线268和270延伸穿过连接臂106以用于连接到中心单元102。因此组装好转子单元104。
在组装了所需数目个转子单元104(诸如在图10中示出的示例中的四个转子单元104)之后,通过以下操作将每个组装好的转子单元104耦接到中心单元102:将布线268和270电耦接到中心单元102的相应的电连接器(未图示),并且随后将连接臂106安装到中心单元102。随后组装好飞行器100。如图10中所示,除了向各种部件提供电力之外,电池组件156还可充当支撑腿。
图15是在马达136、ESC模块178、电池组件156安装到基座结构232的情况下的转子单元104的一部分的示意性横截面视图,用于绘示其电连接。如图示,ESC模块178包括三组电端子322、324和326,分别用于从电池组件156接收电力、向电动马达136供电并且与所述电动马达通信以及与中央控制电路182通信。
第一组电端子322位于ESC模块178的底壁上并且与电池组件156的第二组电端子304电接触,所述第二组电端子随后电耦接到电池单元格158。
第二组电端子324位于ESC模块178的顶壁上并且与基座结构232的第一组电端子262电接触,所述第一组电端子随后电耦接到电动马达136的对应的电端子(未图示)。
第三组电端子326位于基座结构232的后壁上并且与所述基座结构的第二组电端子324电接触,如上文描述,所述第二组电端子随后经由导电布线268电耦接到中心单元102中的中央控制电路182。
电池组件156的第一组电端子302电耦接到电池单元格158。电池组件156的第二组电端子304电耦接到ESC模块178的电端子322。电池组件156的第三组电端子306电耦接到基座结构232的第三组电端子266,如上文描述,所述第三组电端子266随后经由导电布线270电耦接到中心单元102中的中央控制电路182。
以此方式,电池组件156经由ESC模块178向电动马达136供电,并且经由电线270向中心单元102中的中央控制电路182(参见图5和图6)供电。中心单元102中的中央控制电路182经由电线268与ESC模块178通信以用于调整电动马达136的操作。
图16示出了替代性实施方案中的飞行器100。在此实施方案中的飞行器100是所谓的“六轴飞行器”并且类似于在图10中示出的飞行器,不同之处在于,在此实施方案中的飞行器100包括具有货物舱(未图示)的一个中心单元102、和六(6)个转子单元104。
图17示出了另一实施方案中的飞行器100。在此实施方案中的飞行器100是所谓的“八轴飞行器”并且类似于在图10中示出的飞行器,不同之处在于,在此实施方案中的飞行器100包括具有货物舱(未图示)的一个中心单元102、和八(8)个转子单元104。
在以上实施方案中,每个转子单元104都包括电池组件156。这些实施方案中的飞行器100具有大体上均匀的重量分布的优势。在一些替代性实施方案中,一些转子单元104可能不包括任何电池组件。
例如,在如图18中示出的一个实施方案中,八轴飞行器100包括各自具有电池组件156的四个转子单元104A和不具有电池组件的四个转子单元104B,其中八个转子单元104A和104B沿周向均匀地布置在中心单元102周围。具有电池组件的每个转子单元104A沿周向位于不具有电池组件的一对相邻的转子单元104B的中间。
在以上实施方案中,每个电池组件156还用作支撑腿。在包括上文描述的实施方案的一些实施方案中,一个或多个支撑腿可各自包括电池组件156(和任选地其他部件,诸如轮),其中电池组件156可被封围在支撑腿中(且因此充当支撑腿)、是支撑腿的一部分、或附接到、安装到或以其他方式耦接到支撑腿。
在一些实施方案中,一个或多个电池组件可从一个或多个推进模块中的至少一者向下延伸,然而,所述一个或多个电池组件不充当支撑腿。例如,此类一个或多个电池组件可短于其他电池组件和/或支撑腿并且因此不充当支撑腿。
在如图19A中所示的一些实施方案中,飞行器100的每个转子单元104都包括支撑腿402。电池组件156作为水平横杆耦接到支撑腿402。在这些实施方案中,连接臂106、电池组件156和支撑腿402形成舱122以便在其中接收物品。
在如图19B中所示的一些实施方案中,飞行器100的每个转子单元104都包括支撑腿402。电池组件156作为水平连接臂106耦接到转子单元104的基座结构232。在这些实施方案中,电池组件156(还用作连接臂106)和支撑腿402封围出用于接纳舱(未图示)的空间。
在如图19C中所示的一些实施方案中,飞行器100的每个转子单元104都包括支撑腿402。多个连接臂106耦接在基座结构232之间、耦接在基座结构232与中心单元102之间和/或耦接在支撑腿402之间,以便形成笼状物382。笼状物382的框架(诸如连接臂106和支撑腿402)或其任何合适的部分可包括电池组件156。
在一些实施方案中,中心单元102包括由与连接臂106和支撑腿402分离的框架形成的笼状物382。所述框架或其任何合适的部分可包括电池组件156。
在如图19D中所示的一些实施方案中,舱122包括位于其中的多个传感器和/或电气装置。多个转子单元104耦接到中心单元102的舱122的下部部分。对电磁干扰敏感的传感器和电气部件的至少一部分布置在舱122的远端部分384(诸如舱122的顶部或上部部分)上。舱122还在其近端部分386(诸如舱122的在底板388下方的底部或下部部分)上包括电池组件156,使得电池组件156与传感器和电气部件相距足够的距离以避免对其的电磁干扰。
在如图19E中所示的一些实施方案中,中心单元102还包括位于舱122下方的笼状物390。笼状物390可通过与上文描述的笼状物282类似的方式形成,诸如由连接臂106和/或支撑腿402形成,或可替代地由与连接臂106和支撑腿402分离的框架形成。笼状物390或其任何合适的部分可包括电池组件156,使得电池组件156与传感器和电气部件相距足够的距离以避免对其的电磁干扰。在一些实施方案中,电池组件156可位于笼状物390内。
图19F示出了一些替代性实施方案中的飞行器100。这些实施方案中的飞行器100类似于在图19D中示出的飞行器,不同之处在于,在这些实施方案中,转子单元104耦接到中心单元102的舱122的上部部分。类似于在图19D中示出的飞行器,对电磁干扰敏感的传感器和电气部件的至少一部分布置在舱122的远端部分384(诸如舱122的顶部或上部部分)上。舱122还在其近端部分386(诸如舱122的在底板388下方的下部部分)上包括电池组件156,使得电池组件156与传感器和电气部件相距足够的距离以避免对其的电磁干扰。与在图19D中示出的飞行器相比,这些实施方案中的飞行器100具有以下优势:诸如中央控制电路182的电气部件靠近ESC模块178和马达136。因此,中央控制电路182可使用具有减少的电噪声和/或干扰的短布线连接到ESC模块178和马达136。
在以上实施方案中,中央控制电路182是由电池组件156供电。在一些替代性实施方案中,中央控制电路182包括其自身的电池或合适的电源,并且不需要来自电池组件156的任何电力。
在以上实施方案中,电池组件156在被组装到飞行器100时处于竖直或水平定向。在一些替代性实施方案中,一些或所有电池组件156在被组装好时可处于倾斜定向(即,其相对于水平面的角度在0°与90°之间)。
图20A至图22E示出一些替代性实施方案中的电池组件156的各种配置。在如图20A中所示的一个实施方案中,转子单元104类似于在图11中示出的转子单元,其中转子单元104的电池组件156从基座结构232向下延伸。然而,在此实施方案中,电池组件156具有短长度并且不被配置为充当支撑腿。在此实施方案中的飞行器100包括单独的支撑腿(未图示)。
在如图20B中所示的一个实施方案中,转子单元104的电池组件156在与基座结构232和转子组件134隔开或接近或相邻的位置处与中心单元(未图示)相距足够的距离从连接臂106向下延伸。在此实施方案中,电池组件156还被配置为充当支撑腿。
在如图20C中所示的一个实施方案中,转子单元104的电池组件156朝向转子单元104的近端404从基座结构232水平向后延伸,并且使用合适的紧固构件(诸如螺丝、胶水、焊接等等)耦接到连接臂106的顶部。
在如图20D中所示的一个实施方案中,转子单元104的电池组件156朝向转子单元104的近端404从基座结构232水平向后延伸,并且使用合适的紧固构件(诸如螺丝、胶水、焊接等等)耦接到连接臂106的底部。
图21A至图21C示出替代性实施方案中的电池组件156的配置。图21A是转子104的侧视图。图21B是从由箭头244”指示的后侧观看的转子104的后视图。图21C是转子104的透视图。如图示,此实施方案中的电池组件156朝向转子单元104的近端404从基座结构232水平向后延伸,并且使用合适的紧固构件(诸如螺丝、胶水、焊接等等)耦接到连接臂106的横向侧。
在如图22A中所示的一个实施方案中,转子单元104的电池组件156包括多个电池单元(还表示为156),朝向转子单元104的近端404从基座结构232水平向后延伸,并且使用合适的紧固构件(诸如螺丝、胶水、焊接等等)沿周向围绕连接臂106耦接到所述连接臂。
在如图22B中所示的一个实施方案中,电池组件156包括纵向钻孔并且朝向转子单元104的近端404从基座结构232水平向后延伸。连接臂106从基座结构232向后延伸穿过电池组件156的纵向钻孔并且耦接到中心单元(未图示)。换句话说,电池组件156从基座结构并且沿周向围绕连接臂106水平向后延伸。
在如图22C中所示的一个实施方案中,电池组件156包括两个电池单元156-1和156-2。电池单元156-1从基座结构232水平向前延伸远离转子单元104的近端404。电池单元156-2包括纵向钻孔,并且朝向转子单元104的近端404从基座结构232水平向后延伸。连接臂106从基座结构232水平向后延伸穿过电池组件156的纵向钻孔并且耦接到中心单元(未图示)。
在如图22D中所示的一个实施方案中,电池组件156可接纳在基座结构232中或与所述基座结构集成。
在如图22E中所示的一个实施方案中,电池组件156可接纳在连接臂106中或与所述连接臂集成。
在以上实施方案中,每个转子单元104都包括被配置为拉动器的转子组件134,所述拉动器具有位于电动马达136上方的叶片138。在一些实施方案中,转子单元104中的至少一些包括被配置为推动器的转子组件134,所述推动器具有它们的位于对应的电动马达110下方的螺旋桨或叶片138。
例如,在如图23A中所示的一个实施方案中,转子组件134被配置为推动器并且电池组件156从基座结构232向上延伸。
在如图23B中所示的一个实施方案中,转子组件134被配置为推动器。转子单元104的电池组件156包括多个电池单元,朝向转子单元104的近端404从基座结构232向后延伸,并且使用合适的紧固构件(诸如螺丝、胶水、焊接等等)沿周向围绕连接臂106耦接到所述连接臂。
在如图24A和图24B中所示的一些实施方案中,一个或多个转子单元104可各自包括两个转子组件134A和134B,其中一个转子组件134A被配置为具有位于电动马达136上方的叶片138的拉动器,并且另一转子组件134B被配置为具有位于电动马达136下方的叶片138的推动器。
在图24A中所示的实施方案中,电池组件156在与基座结构232和转子组件134和134B隔开或接近或相邻的位置处与中心单元(未图示)相距足够的距离从连接臂106向下延伸。在此实施方案中,电池组件156还被配置为充当支撑腿。
在图24B中所示的实施方案中,电池组件156可接纳在基座结构232中或与所述基座结构集成。
在类似于在图24B中示出的实施方案的一个实施方案中,电池组件156可接纳在连接臂106中或与所述连接臂集成。
虽然在以上实施方案中飞行器100包括功率平衡板186,但在一些替代性实施方案中,飞行器100可不包括功率平衡板186。这些实施方案的缺点在于,电池组件156可能以不同的速率被消耗。因为飞行器100的飞行通常超过在至少一个电池组件耗竭时,所以不具有功率平衡的飞行器100的飞行时间可短于具有功率平衡的飞行器100的飞行时间。
在图10至图15中示出的实施方案中,基座结构232包括具有两对凹槽252和254的第一接合结构。电池组件156包括可接合的第二接合结构,所述可接合的第二接合结构具有分别能够与基座结构232的两对凹槽252和254接合的两对脊状物286和288。在一些替代性实施方案中,基座结构232可仅包括一对凹槽,并且电池组件156可仅包括分别能够与基座结构232的一对凹槽接合的一对脊状物。
在一些替代性实施方案中,基座结构232可包括三对或更多对凹槽252和254,并且电池组件156包括分别能够与基座结构232的三对或更多对凹槽252和254接合的三对或更多对脊状物286和288。
在一些替代性实施方案中,基座结构232可包括两对脊状物,并且电池组件156可包括分别能够与基座结构232的两对脊状物接合的两对凹槽。
在一些替代性实施方案中,基座结构232可包括另一数目对脊状物,并且电池组件156可包括分别能够与基座结构232的脊状物接合的对应数目个凹槽。
在以上实施方案中,每个转子单元104经由耦接部件106耦接到中心单元102。在一些替代性实施方案中,转子单元104中的至少一者可具有合适的大小和形状,使得转子单元104可自身是耦接部件并且直接耦接到中心单元102。
在如图25中所示的一些替代性实施方案中,飞行器100包括主体或壳体442,壳体在其中接纳多个部件。具体地,壳体442在其中接纳马达136、ESC模块178、电池组件156、中央控制电路182和如上文描述的其他合适的部件(未图示)。类似于上文描述的实施方案,马达136、ESC模块178和电池组件156被布置成彼此接近或邻近,并且中央控制电路182与电池组件156间隔或相距一定距离。
马达136包括轴,所述轴延伸出壳体442并且可旋转地耦接到螺旋桨138。电池组件156经由ESC模块178向马达136供电,并且还向中央控制电路182和其部件供电。
中央控制电路182包括飞行控制模块184,所述飞行控制模块控制ESC模块178来调整马达136的转速以用于控制飞行器100的飞行。
在如图26中所示的一些替代性实施方案中,电池供电型飞行器100是固定翼双机身无人机。飞行器100包括:主体,所述主体由两个机身502形成,所述两个机身由呈中央翼区段的形式的连接区段504B耦接;以及两个侧翼区段504A和504C,所述两个侧翼区段从相应的机身502向外延伸。连接区段504B包括乘客或货物舱506。
每个机身502在其中在其前端周围接纳由马达136和ESC 178形成的推进模块以及被布置成与所述推进模块接近或邻近的电池组件156。舱506在其中接纳具有飞行控制模块304和功率平衡板186的中央控制电路182,以及如上文描述的其他合适的部件(未图示)。因此,中央控制电路182与电池组件156隔开。
每个马达136都包括轴,所述轴延伸出机身502并且可旋转地耦接到螺旋桨138。电池组件156经由ESC 178向马达110供电,并且还向中央控制电路182和其部件供电。这些实施方案中的飞行器100的部件的电互连类似于在图5和图6中描述的电互连。
图27示出了一些替代性实施方案中的固定翼双机身飞行器100。这些实施方案中的飞行器100类似于在图26中示出的飞行器,不同之处在于,在这些实施方案中,机身502不包括任何电池组件。而是,每个侧翼区段504A、504C都包括电池组件156。因此,中央控制电路182与电池组件156隔开。
图28示出了一些替代性实施方案中的固定翼双机身飞行器100。这些实施方案中的飞行器100类似于在图26中示出的飞行器,不同之处在于,在这些实施方案中,每个机身502都包括电池组件156,并且每个侧翼区段504A、504C也包括电池组件156。因此,中央控制电路182与电池组件156隔开。
在如图29中所示的一些替代性实施方案中,电池供电型飞行器100是固定翼单机身无人机。飞行器100包括由机身502形成的主体,以及从所述主体向外延伸的两个翼区段504A和504C。机身502在其中在其前端周围接纳由马达136和ESC 178形成的推进模块。马达136包括轴,所述轴向前延伸出机身502并且可旋转地耦接到螺旋桨138。机身502还在其中在其后端周围接纳具有飞行控制器304和功率平衡板186的中央控制电路182,以及如上文描述的其他合适的部件(未图示)。
翼区段504A和504C中的每一者在其中接纳电池组件156。因此,中央控制电路182与电池组件156隔开。
电池组件156经由ESC 178向马达110供电,并且还向中央控制电路182和其部件供电。这些实施方案中的飞行器100的部件的电互连类似于在图5和图6中描述的电互连。
图30示出了一些替代性实施方案中的固定翼单机身飞行器100。这些实施方案中的飞行器100类似于在图29中示出的飞行器。然而,在这些实施方案中,中央控制电路182和其部件定位在机身502的后端周围,诸如定位在稳定器508中。另外,这些实施方案中的飞行器100包括三个电池组件156,其中两个电池组件156位于左翼区段和右翼区段504A和504C中,并且第三电池组件156在机身502的前端周围定位在所述机身中。因此,中央控制电路182与电池组件156隔开。
在以上实施方案中,每个转子组件134功能性地耦接到ESC模块178并且由所述ESC模块控制。在一些替代性实施方案中,电池供电型飞行器100不包括任何单独的ESC模块178。在这些实施方案中,中央控制电路182包括实施ESC模块178的功能以用于控制电动马达136的转速的必需的部件和/或电路。
虽然在以上实施方案中飞行器100仅包括一个舱122作为中心单元102的一部分,但在一些替代性实施方案中,飞行器100可包括分布在中心单元102和/或至少一些转子单元104上的多个舱122。
在以上实施方案中,一个或多个电池组件156与中心单元102相距一定距离。因此,与电池组件156安装在中心单元102中并且与其中的电气部件相距短距离的常规设计相比,由电池组件156导致的对中心单元102中的诸如磁力计等电气部件的电磁干扰得到显著减少或甚至实际上得以消除。
因为电池组件156定位成接近或邻近于电动马达136和对应的ESC模块,所以其间的电气布线一般是短的,进而减少在动态马达转速变化期间的电噪声和变化。
本领域技术人员将了解,重量是电池供电型飞行器的重要或甚至关键因素。通过将一个或多个电池组件定位成与中央控制电路相距一定距离并且接近或邻近于推进模块(和其动力传动系统),本文公开的电池供电型飞行器与传统的电池供电型飞行器相比可实现重量减小。另外,电池组件在转子单元104上的大体上均匀的重量分布提供了电池供电型飞行器的操作中的增加的稳定性。
本领域技术人员将了解,在以上实施方案中,可通过以下方式实现重量减小:(i)电池供电型飞行器的主体的结构部分或部件的重量减小;和/或(ii)采用缩短长度的电力布线的重量减小。
例如,在传统的多轴电池供电型飞行器中,中央控制电路和电池位于中心单元中,而推进模块位于转子单元中。另外,有效负载通常位于中心单元下方。当在转子单元处生成提升力时,因此需要主体的结构部分(诸如连接臂和中心单元(具体地,中心单元的接纳连接臂的结构部分))具有用于容纳中心单元的组合重量的高强度,这一般暗示对连接臂和中心单元的高重量要求。
另一方面,通过将一个或多个电池组件156定位成与中央控制电路182相距一定距离并且接近或邻近于推进模块105,一个或多个电池组件156位于转子单元104中。因为一个或多个电池组件156的重量是由转子单元104承载,所以连接臂106和中心单元102不需要与传统的多轴电池供电型飞行器的强度一样高的强度。可充分减小连接臂106和中心单元102的重量和继而整个电池供电型飞行器100的重量。此类重量减小产生增加的电池重量/飞行器重量比率。
本文公开的电池供电型飞行器100的重量减小还可通过使用缩短长度的电力布线来实现。
例如,在多轴电池供电型飞行器中,推进模块105从ESC模块178接收电力信号和控制信号,并且ESC模块178继而从电池156接收电力。与仅需要用于传输控制信号的小电流的信号线或电缆相比,电力线或电缆一般需要大电流并且因此一般更厚(即,具有更大规格)并且更重。
在传统的多轴电池供电型飞行器中,中央控制电路和电池位于中心单元中,并且推进模块位于转子单元中。ESC模块可位于中心单元中或转子单元中。因此,在中心单元与转子单元之间需要用于将电力从中心单元处的电池输送到多个转子单元处的推进模块的长电力电缆,而不管ESC模块位于何处。
另一方面,在本文公开的电池供电型飞行器100的一些实施方案中,中央控制电路182位于中心单元102处并且可具有其自身的电源,并且每个转子单元104包括彼此接近或邻近的电池组件156、ESC模块178和推进模块130,因此,电池供电型飞行器100不需要在中心单元102与多个转子单元104之间的任何电力电缆,进而导致重量减小。
虽然本文公开的电池供电型飞行器100可需要延长的信号线来用于传输控制信号,并且在一些实施方案中可需要附加的信号线来用于诸如有源功率平衡等功率平衡,但信号线的增加的重量可能抵消不了由于缩短的电力电缆而引起的重量减小,因为信号线一般比电力电缆重量轻得多。由于缩短的电力电缆而引起的重量减小对于大型的电池供电型飞行器来说可更显著。
在一些实施方案中,使用无源功率平衡,其中可使用附加的电力电缆以用于从分布在转子单元104中的电池组件156延伸到中心单元102中的共同的连接点。因为平衡电流一般远低于向推进模块105和ESC模块178供电所需的电流,所以用于无源功率平衡的电力电缆的规格比用于向推进模块105和ESC模块178供电的电力电缆的规格小。另外,每根功率平衡电缆可包括比电力电缆更少数目根电线,诸如与用于向推进模块105和ESC模块178供电的每根电力电缆中的三根较大规格电力线相比之下的每根功率平衡电缆中的两根较小规格电线。因此,本文公开的电池供电型飞行器100可在使用无源功率平衡时仍然实现重量减小。
本文公开的电池供电型飞行器100的另一优势在于,通过将每个电池组件156定位成接近或邻近于对应的ESC模块178(例如,参见图12和图15),缩短了在电池组件156与ESC模块178之间的电线,进而降低了ESC故障的风险。
另外,通过将电池组件分布到转子单元104上或附近,与将电池组件安装在中心单元102中的常规设计相比,可在增加的电池安全性的情况下使用不同类型的电池组件。
虽然已经在上文参考附图描述了实施方案,但本领域技术人员将了解,可在不脱离由所附权利要求限定的其范围的情况下作出变化和修改。
- 具有分布式电池的无人驾驶运输飞行器及其供电方法
- 具有壁厚测量传感器的无人驾驶飞行器、相应壁厚测量方法以及用于无人驾驶飞行器的具有壁厚测量传感器的改装套件