一种用于测量滚珠丝杠导程误差的精密运动平台
文献发布时间:2023-06-19 11:16:08
技术领域
本发明涉及淡水存储装置的技术领域,特别涉及一种用于测量滚珠丝杠导程误差的精密运动平台。
背景技术
滚珠丝杠是将回转运动转化为直线运动,或将直线运动转化为回转运动的理想产品。滚珠丝杠是工具机械和精密机械上最常使用的传动元件,其主要功能是将旋转运动转换成线性运动,或将扭矩转换成轴向反复作用力,同时兼具高精度、可逆性和高效率的特点。由于具有很小的摩擦阻力,滚珠丝杠被广泛应用于各种工业设备和精密仪器。
现有的测量滚珠丝杠导程误差技术存在以下不足:对滚珠丝杠导程误差进行检测的设备操作较为复杂,对检测设备不熟悉的工作人员在进行操作时,易因操作失误而导程误差测量结果不准确,不便于工作人员的学习和使用。同时对于小行程的滚珠丝杠的测量易存在较大的测量误差。
发明内容
本发明意在提供一种用于测量滚珠丝杠导程误差的精密运动平台,解决了现有的滚珠丝杠导程误差检测设备操作复杂的问题。
为了达到上述目的,本发明的技术方案如下:一种用于测量滚珠丝杠导程误差的精密运动平台,包括支撑座、设置在支撑座上的直线滑台和用于测量固定座位移量的激光干涉仪,所述直线滑台上设有固定座,所述固定座一侧设有滚珠螺母,所述滚珠螺母上设有穿过固定座的第一螺纹杆;所述第一螺纹杆的一端设有第一联轴器,所述第一联轴器上设有伺服电机,所述伺服电机上螺栓连接有第一支撑架,所述支撑架上设有第一手动不锈钢升降台;所述伺服电机上远离第一螺纹杆的一侧还设有第二联轴器,所述第二联轴器上设有光栅编码器,所述光栅编码器上设有第二支撑架,所述第二支撑架上设有第二手动不锈钢升降台,所述激光干涉仪设置在支撑座的正前方。
进一步的,所述第一螺纹杆的自由端抵触有顶杆,所述顶杆上设有第三手动不锈钢升降台。
进一步的,所述顶杆上设有水平调节机构,所述水平调节机构包括对称设置在第三手动不锈钢升降台固定板,两个所述固定板之间转动连接有第二螺纹杆,所述第二螺纹杆上螺纹连接移动板,所述移动板上穿设有连接在两个固定板之间的导杆,所述移动板与顶杆螺纹连接。
通过上述设置,借助调节机构可实现顶杆水平和竖直位置的调节,从而保持顶杆与第一螺纹杆始终相抵,提高了本装置的稳定性。
进一步的,所述精密运动平台的测量方法包括如下步骤:
S1、将待测的第一螺纹杆安装在滚珠螺母上并通过第一联轴器与伺服电机连接;
S3、调节第一手动不锈钢升降台、第二手动不锈钢升降台来调节第一支撑架和第二支撑架的高度,再转动第一支撑架和第二支撑架来使第一螺纹杆、伺服电机的输出轴、以及光栅编码器保持在同一直线上;
S5、开启伺服电机并控制伺服电机转动的角度,借助光栅编码器测得伺服电机实际的转动角度为α,其实际移动的位移量X1=α×1000/65536,伺服电机转动后利用滚珠螺母和第一螺纹杆来带动固定座在直线滑台上移动,通过激光干涉仪测出固定座的位移量为X2,则滚珠丝杠导程误差ΔX=X1-X2。
与现有技术相比,本方案的有益效果:
本方案通过激光干涉仪、直线滑台、第一手动不锈钢升降台、第二手动不锈钢升降台、光栅编码器和顶杆来测量滚珠丝杠的导程误差,使对滚珠丝杠导程误差的测量受工作人员操作差异影响较小,同时本方案操作简单、测量精确。
附图说明
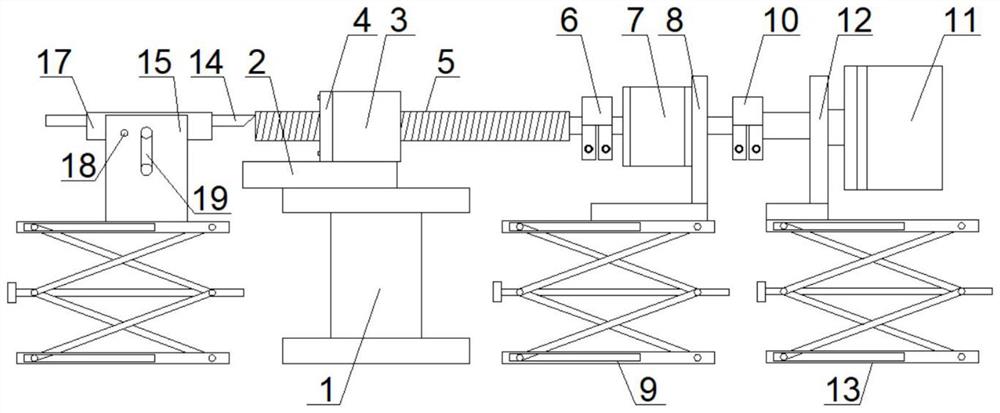
图1是本发明一种用于测量滚珠丝杠导程误差的精密运动平台的主视图;
图2是本实施例中水平调节机构的俯视图。
具体实施方式
下面通过具体实施方式对本发明作进一步详细的说明:
说明书附图中的附图标记包括:支撑座1、直线滑台2、固定座3、滚珠螺母4、第一螺纹杆5、第一联轴器6、伺服电机7、第一支撑架8、第一手动不锈钢升降台9、第二联轴器10、光栅编码器11、第二支撑架12、第二手动不锈钢升降台13、顶杆14、固定板15、第二螺纹杆16、移动板17、导杆18、摇柄19。
实施例
如附图1和图2所示:一种用于测量滚珠丝杠导程误差的精密运动平台,包括支撑座1、螺栓连接在支撑座1上的直线滑台2和用于测量固定座3位移量的激光干涉仪。直线滑台2上螺栓连接有固定座3,固定座3的左侧螺栓连接有滚珠螺母4,滚珠螺母4上螺纹连接有右端穿过固定座3的第一螺纹杆5。第一螺纹杆5的右端同轴连接有第一联轴器6,第一联轴器6上同轴连接有伺服电机7,伺服电机7的底部螺栓连接有第一支撑架8,第一支撑架8的底部设有第一手动不锈钢升降台9,伺服电机7右侧的输出轴上还同轴连接有第二联轴器10,第二联轴器10上连接有光栅编码器11,光栅编码器11上设有第二支撑架12,第二支撑架12的底部设有第二手动不锈钢升降台13。激光干涉仪设置在支撑座1的正前方。第一螺纹杆5的左端抵触有顶杆14,顶杆14的下方设有第三手动不锈钢升降台,第三手动不锈钢升降台、第二手动不锈钢升降台13和第一手动不锈钢升降台9均采用潍坊祥意化工有限公司声场的实验室用手动不锈钢升降台,型号为200*200mm。顶杆14上设有水平调节机构,水平调节机构包括对称设置在第三手动不锈钢升降台前后两侧的固定板15,两个固定板15之间转动连接有第二螺纹杆16,第二螺纹杆16上螺纹连接移动板17,移动板17上穿设有连接在两个固定板15之间的导杆18,导杆18位于第二螺纹杆16的左侧,移动板17与顶杆14螺纹连接,顶杆14位于第二螺纹杆16的上方;第二螺纹杆16的前端粘附有位于两块固定板15外的摇柄19,摇柄19采用“Z”字形。借助水平调节机构可使顶杆14在竖直和水平方向上进行距离的调节,从而保持顶杆14与第一螺纹杆5始终相抵,防止第一螺纹杆5轴向窜动和径向跳动,提高了本装置的精确性。
精密运动平台的测量方法包括如下步骤:
S1、将待测的第一螺纹杆5安装在滚珠螺母4上并通过第一联轴器6与伺服电机7连接;
S3、通过手动调节第一手动不锈钢升降台9、第二手动不锈钢升降台13来使第一支撑架8和第二支撑架12的高度保持一致,再转动第一支撑架8和第二支撑架12来使第一螺纹杆5、伺服电机7的输出轴、以及光栅编码器11保持在同一直线上;
S5、开启伺服电机7并控制伺服电机7转动的角度,借助光栅编码器11测得伺服电机7实际的转动角度为α,其实际移动的位移量X1=α×1000/65536,伺服电机7转动后利用滚珠螺母4和第一螺纹杆5来带动固定座3在直线滑台2上移动,通过激光干涉仪测出固定座3的位移量为X2,则滚珠丝杠导程误差ΔX=X1-X2。
以上的仅是本发明的实施例,方案中公知的具体结构和/或特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本申请要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
- 一种用于测量滚珠丝杠导程误差的精密运动平台
- 一种用于测量滚珠丝杠导程误差的精密运动平台