一种沉井壁行挖掘装置
文献发布时间:2023-06-19 11:16:08
技术领域
本发明涉及一种沉井壁行挖掘装置,应用于土木工程中地下结构及基础工程领域。
背景技术
沉井常用于矿山、给排水和市政工程中。随着给排水和市政工程中沉井深度的增加,目前市政沉井的深度预计可达50米以上。人工凿井工程中,人员在井下的安全性问题日益突出。目前条件允许的沉井工程中,有普通挖掘装置完成挖掘作业,再由吊桶出土,但随着沉井深度的增加,井内通风、排水和梯子间要求均有所提高,以上问题均对井下人员的安全和劳动条件造成不利影响,因此实现挖掘装置在沉井井下的自动化挖掘有重要意义。
发明内容
有鉴于此,本发明实施例提供一种沉井壁行挖掘装置,能够实现挖掘装置沿沉井井壁自动完成挖掘作业,实现沉井的遥控或自动化挖掘,可以实现人员不下井,有效降低沉井的安全风险和施工难度。
为达到上述目的,本发明所采取的方案为:
一种沉井壁行挖掘装置,其特征在于,包括环向导轨、挖掘主机和辅助装置;环向导轨固定在沉井结构底部,挖掘主机能够沿着环向导轨移动至挖掘作业位置,挖掘沉井内的土石;辅助装置位于沉井井口外侧,与挖掘主机沿沉井周长方向同步移动,并为挖掘主机提供动力同时控制挖掘主机动作。
进一步的,所述环向导轨包括导轨底板、导轨座、上导轨、下导轨和防护罩;导轨底板沿着沉井竖直方向与沉井结构共同预制,上下安装有防护罩,对环向导轨起到防护作用;导轨座、上导轨和下导轨为分段结构,上导轨和下导轨分别安装在导轨座的上部和下部,导轨座沿着导轨底板的竖直方向连接在导轨底板上。
进一步的,上导轨或下导轨有齿条,能够作为挖掘主机的行走机构。
进一步的,所述挖掘主机包括环移平车、挖掘臂、挖斗、弱电箱、液压阀组箱、液压动力管路和弱电线缆;环移平车由挖掘载板、上导向轮、下导向轮、环移马达和环移齿轮组成;上导向轮和下导向轮能够沿着环向导轨运动。
进一步的,环移马达的动力驱动为电力或液压,能够带动环移齿轮在上导轨或下导轨的齿条上旋转,使挖掘主机在环向导轨上移动。
进一步的,挖掘臂由大臂、小臂、挖斗、大臂油缸、小臂油缸和挖斗油缸组成,挖掘臂安装在环移平车挖掘载板的下半部,能够带动挖斗在沉井内径向取土。
进一步的,弱电箱和液压阀组箱安装在环移平车上半部,能够进行挖掘主机工作状态的信号采集并控制环移平车、挖掘臂的动作。
进一步的,所述辅助装置包括辅助装置平车和辅助装置轨道;所述辅助装置平车能够在辅助装置轨道上移动,或者通过履带式或轮式行走装置移动;辅助装置平车上安装有绞盘、线缆架、主泵站,主泵站为挖掘主机提供动力,主泵站的液压油管通过绞盘和线缆架下放至挖掘主机的液压阀组箱内;弱电线缆具有接收挖掘主机信号和传输操作指令的功能,通过绞盘和线缆架下放入沉井内;辅助装置平车上安装还有自动控制系统的处理单元和驾驶员操作台,能够对沉井施工过程进行人为操作和控制。
进一步的,挖掘主机在水下工作时,弱电箱和液压阀组箱外有保护壳防水,保护壳上安装有液压油管接头,对弱电线缆外套液压油管进行防水。
本发明的优点和积极效果是:本发明采用壁行挖掘机掘进进行沉井的掘金,理论平均掘进机速度可达10m/d;除对壁行挖掘机进行必要的检修,基本不需要人员下井,降低了劳动强度;设备和工艺结构简单,成本较低。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
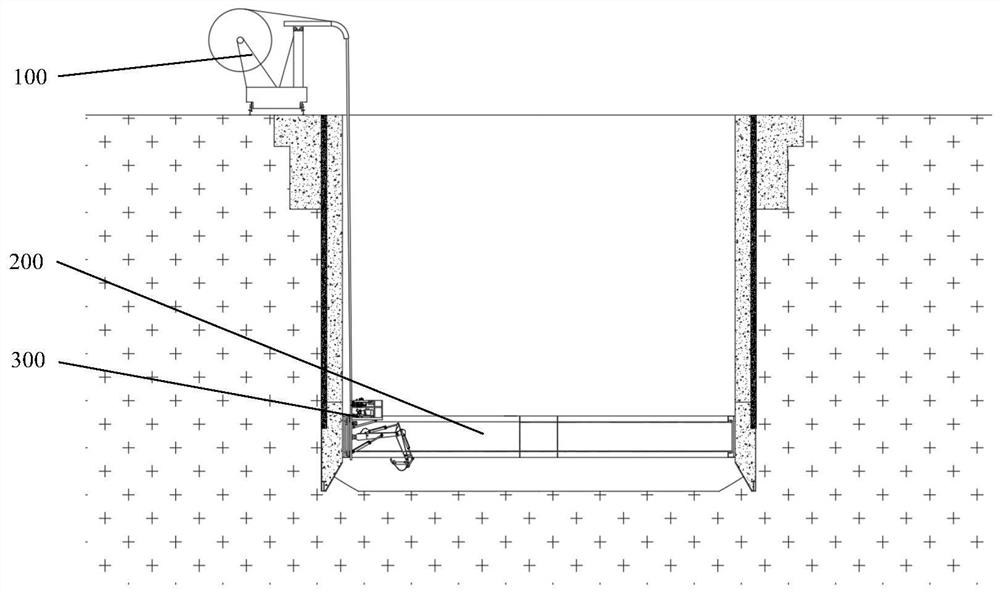
图1为本发明实施例的整体结构示意图;
图2为本发明实施例辅助装置示意图;
图3为本发明实施例刃脚示意图;
图4为本发明实施例壁行挖掘机示意图。
图中,100-辅助装置;101-绞盘;102-线缆架;103-主泵站;104-辅助装置平车;105-辅助装置轨道;200-环向导轨;201-导轨底板;202-上导轨;203-导轨座;204-下导轨;205-防护罩;300-挖掘主机; 301-弱电线缆;302-弱电箱;303-液压阀组箱;304-挖掘载板;305-上导向轮;306-环移马达;307-环移齿轮;308-下导向轮;309-大臂;310-小臂油缸;311-小臂;312-挖斗油缸;313-大臂油缸;314-挖斗。
具体实施方式
以下参照附图及具体实施方式对本发明作进一步说明。
一种沉井壁行挖掘装置,其特征在于,包括环向导轨(200)、挖掘主机(300)和辅助装置(100);环向导轨(200)固定在沉井结构底部,挖掘主机(300)能够沿着环向导轨(200)移动至挖掘作业位置,挖掘沉井内的土石;辅助装置(100)位于沉井井口外侧,与挖掘主机(300)沿沉井周长方向同步移动,并为挖掘主机(300)提供动力同时控制挖掘主机(300)动作。
优选地,所述环向导轨(200)包括导轨底板(201)、导轨座(203)、上导轨(202)、下导轨(204)和防护罩(205);导轨底板(201)沿着沉井竖直方向与沉井结构共同预制,上下安装有防护罩(205),对环向导轨(200)起到防护作用;导轨座(203)、上导轨(202)和下导轨(204)为分段结构,上导轨(202)和下导轨(204)分别安装在导轨座(203)的上部和下部,导轨座(203)沿着导轨底板(201)的竖直方向连接在导轨底板(201)上。
优选地,上导轨(202)或下导轨(204)有齿条,能够作为挖掘主机(300)的行走机构。
优选地,所述挖掘主机(300)包括环移平车、挖掘臂、挖斗(314)、弱电箱(302)、液压阀组箱(303)、液压动力管路和弱电线缆(301);环移平车由挖掘载板(304)、上导向轮(305)、下导向轮(308)、环移马达(306)和环移齿轮(307)组成;上导向轮(305)和下导向轮(308)能够沿着环向导轨(200)运动。
优选地,环移马达(306)的动力驱动为电力或液压,能够带动环移齿轮(307)在上导轨(202)或下导轨(204)的齿条上旋转,使挖掘主机(300)在环向导轨(200)上移动。
优选地,挖掘臂由大臂(309)、小臂(311)、挖斗(314)、大臂油缸(313)、小臂油缸(310)和挖斗油缸(312)组成,挖掘臂安装在环移平车挖掘载板(304)的下半部,能够带动挖斗(314)在沉井内径向取土。
优选地,弱电箱(302)和液压阀组箱(303)安装在环移平车上半部,能够进行挖掘主机(300)工作状态的信号采集并控制环移平车(104)、挖掘臂的动作。
优选地,所述辅助装置(100)包括辅助装置平车(104)和辅助装置轨道(105);所述辅助装置平车(104)能够在辅助装置轨道(105)上移动,或者通过履带式或轮式行走装置移动;辅助装置平车(104)上安装有绞盘(101)、线缆架(102)、主泵站(103),主泵站(103)为挖掘主机(300)提供动力,主泵站(103)的液压油管通过绞盘(101)和线缆架(102)下放至挖掘主机(300)的液压阀组箱(303)内;弱电线缆(301)具有接收挖掘主机(300)信号和传输操作指令的功能,通过绞盘(101)和线缆架(102)下放入沉井内;辅助装置平车(104)上安装还有自动控制系统的处理单元和驾驶员操作台,能够对沉井施工过程进行人为操作和控制。
优选地,挖掘主机(300)在水下工作时,弱电箱(302)和液压阀组箱(303)外有保护壳防水,保护壳上安装有液压油管接头,对弱电线缆(301)外套液压油管进行防水。
- 一种沉井壁行挖掘机自动控制装置和方法
- 一种沉井壁行挖掘机自动控制装置