一种无人机无线充电的自动多机位机巢
文献发布时间:2023-06-19 11:16:08
技术领域
本发明属于无人机机巢技术领域,具体涉及一种无人机无线充电的自动多机位机巢。
背景技术
无人驾驶飞机简称“无人机”,英文缩写为“UAV”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,与有人驾驶飞机相比,无人机往往更适合那些太“愚钝,肮脏或危险”的任务,无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机,民用方面,无人机+行业应用,是无人机真正的刚需;目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术;
目前无人机续航能力弱,充电时间长,在森林、江河、城市、水库、铁路高速公路、油电气输送轨道等超大型场地,无人机无法不间断的执行日常巡查、采集信息、影像记录等任务,且现有无人机需要指定的遥控器去指挥,无法脱离人工操作。
发明内容
本发明的目的在于提供一种无人机无线充电的自动多机位机巢,以解决上述背景技术中提出现有技术中无人机续航时间短,而且需要指定的遥控器指挥从而无法脱离人工操作的问题。
为实现上述目的,本发明采用了如下技术方案:一种无人机无线充电的自动多机位机巢,包括机体,所述机体的顶部安装有机巢,所述机体的内部设置有升降机构,所述机巢的内壁焊接有隔板,所述隔板的表面设置有移动机构,所述机巢的表面安装有无线充电底座,所述机巢的顶部安装有四组顶板,四组所述顶板之间相互接触,所述顶板与机巢之间通过电动合页固定连接,所述机巢的内壁设置有缓冲机构,所述机巢的内壁安装有无线兼容遥控器和恒温恒湿器。
优选的,所述升降机构包括升降平台、第二电机、同步带和螺纹杆,所述机体的内部一体成型有连接板,所述连接板的表面安装有第二电机,所述第二电机的输出端贯穿于连接板的表面,所述第二电机的输出端安装有同步带轮,所述螺纹杆转动连接于连接板的表面,所述螺纹杆的一端转动连接于升降平台的底部,所述螺纹杆的外壁固定有同步带轮,两组所述同步带轮之间通过同步带传动连接,所述升降平台的表面设置有移中心机构。
优选的,所述移中心机构包括凹槽、磁铁板和电动滑轨,所述升降平台的表面开设有凹槽,所述凹槽的内部固定有电动滑轨,所述电动滑轨的滑块表面安装有磁铁板,所述磁铁板卡合于凹槽的内壁。
优选的,所述移动机构包括滑动板、容纳槽和卡边,所述隔板的表面开设有容纳槽,所述容纳槽的内壁开设有卡槽,所述滑动板的侧面一体成型有卡边,所述滑动板活动连接于容纳槽的内部,所述卡边卡合于卡槽的内部,所述隔板的内部安装有驱动气缸,所述驱动气缸的输出端与滑动板的表面相连,所述滑动板的表面设置有无人机入库机构。
优选的,所述无人机入库机构包括第一电机、安装座、复位弹簧、驱动杆、伸缩套管、夹持气缸和调节块,所述滑动板的表面通过螺钉固定连接有第一电机,所述第一电机的输出端贯穿于滑动板的表面,所述第一电机的输出端安装有挡板,所述挡板的表面固定有伸缩套管,所述伸缩套管的一端连接于驱动杆的表面,所述驱动杆与挡板之间固定有复位弹簧,所述复位弹簧套接于伸缩套管的外壁,所述滑动板的表面固定有安装座,所述安装座的底部安装有夹持气缸,所述夹持气缸的输出端安装有调节块,所述调节块靠近驱动杆的一侧设置有斜面。
优选的,所述滑动板的表面开设有限位槽,所述限位槽设置为弧形结构,所述驱动杆的表面开设有限位杆,所述限位杆活动连接于限位槽的内部。
优选的,所述缓冲机构包括缓冲弹簧、连接座和接触板,所述机巢的内壁安装有连接座,所述连接座的表面安装有两组缓冲弹簧,两组所述缓冲弹簧固定于接触板的表面,所述接触板的另一侧粘接有橡胶垫。
优选的,所述升降平台的内部安装有GPS定位器,所述GPS定位器和无线充电底座与电源相连。
本发明的技术效果和优点:本发明提出的一种无人机无线充电的自动多机位机巢,与现有技术相比,具有以下优点:
本装置通过升降机构将无人机收回至机巢内部,通过移中心机构对无人机进行定位,通过无人机入库机构将无人机停留在无线充电底座的顶部,而且一个机巢主体有四个无线充电底座同时给四台无人机充电,解决了无人机因续航能力弱、充电时间长而无法持续执行飞行任务的问题,在非恶劣环境下可实现二十四小时不间断的、覆盖式地执行飞行命令。
附图说明
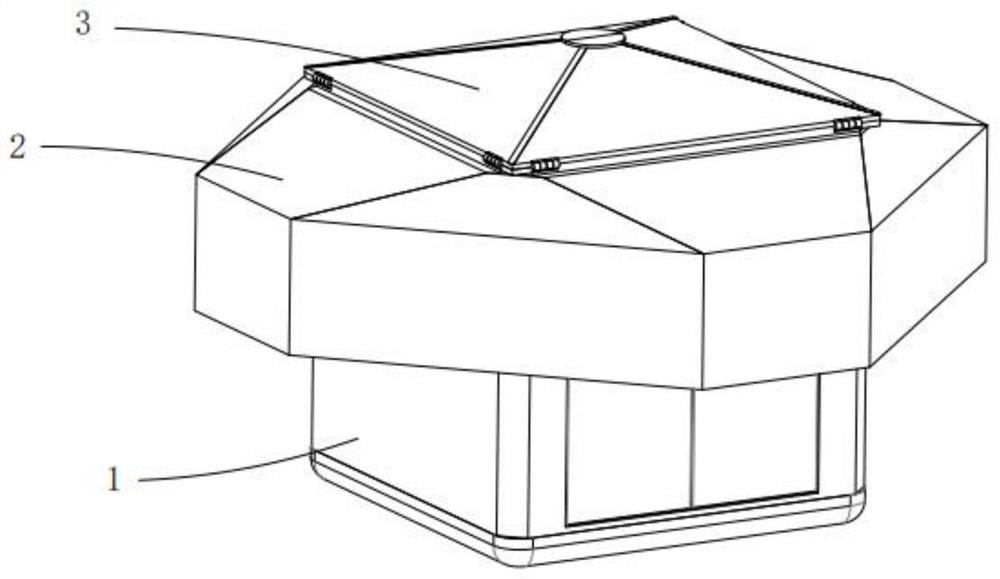
图1为本发明的主体结构示意图;
图2为本发明机巢的俯视结构示意图;
图3为本发明图2中A区的放大结构示意图;
图4为本发明无人机入库机构的侧面结构示意图;
图5为本发明无人机入库机构的正面结构示意图;
图6为本发明机体的内部结构示意图;
图7为本发明升降平台的剖视结构示意图;
图8为本发明的框图。
图中:1、机体;2、机巢;3、顶板;4、无线充电底座;5、隔板;6、缓冲弹簧;7、第一电机;8、连接座;9、升降平台;10、限位杆;11、安装座;12、复位弹簧;13、伸缩套管;14、驱动杆;15、滑动板;16、夹持气缸;17、调节块;18、限位槽;19、容纳槽;20、卡边;21、第二电机;22、同步带;23、螺纹杆;24、磁铁板;25、电动滑轨。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明提供了如图1-8所示的一种无人机无线充电的自动多机位机巢,包括机体1;
机体1的顶部安装有机巢2,机体1的内部设置有升降机构,机巢2的内壁焊接有隔板5,隔板5的表面设置有移动机构,机巢2的表面安装有无线充电底座4,机巢2的顶部安装有四组顶板3,四组顶板3之间相互接触,顶板3与机巢2之间通过电动合页固定连接,机巢2的内壁设置有缓冲机构,机巢2的内壁安装有无线兼容遥控器和恒温恒湿器,升降平台9的内部安装有GPS定位器,GPS定位器和无线充电底座4与电源相连,无线兼容遥控器与恒温恒湿器、第一电机7、第二电机21、驱动气缸、夹持气缸16以及电动合页电性连接,无线兼容遥控器、恒温恒湿器、第一电机7、第二电机21、驱动气缸、夹持气缸16以及电动合页与电源相连,恒温恒湿器能够控制机巢2内部温度湿度恒定,使无人机的充电保持在正常的温度湿度环境下;
升降机构包括升降平台9、第二电机21、同步带22和螺纹杆23,机体1的内部一体成型有连接板,连接板的表面安装有第二电机21,第二电机21的输出端贯穿于连接板的表面,第二电机21的输出端安装有同步带22轮,螺纹杆23转动连接于连接板的表面,螺纹杆23的一端转动连接于升降平台9的底部,螺纹杆23的外壁固定有同步带22轮,两组同步带22轮之间通过同步带22传动连接,升降平台9的表面设置有移中心机构,通过GPS定位器进行定位,通知附近的机巢2打开顶板3,同时无线兼容遥控器控制第二电机21启动,第二电机21通过两组同步带轮和同步带22的传动连接带动螺纹杆23转动,从而使得螺纹杆23带动升降平台9升起;
移中心机构包括凹槽、磁铁板24和电动滑轨25,升降平台9的表面开设有凹槽,凹槽的内部固定有电动滑轨25,电动滑轨25的滑块表面安装有磁铁板24,磁铁板24卡合于凹槽的内壁,无人机在完成二维码扫描后进行降落,此时无线兼容遥控器控制电动滑轨25启动,电动滑轨25带动磁铁板24移动,将无人机进行吸附,然后控制磁铁板24带动无人机停在升降平台9的正中;
移动机构包括滑动板15、容纳槽19和卡边20,隔板5的表面开设有容纳槽19,容纳槽19的内壁开设有卡槽,滑动板15的侧面一体成型有卡边20,滑动板15活动连接于容纳槽19的内部,卡边20卡合于卡槽的内部,隔板5的内部安装有驱动气缸,驱动气缸的输出端与滑动板15的表面相连,滑动板15的表面设置有无人机入库机构,无线兼容遥控器控制驱动气缸启动,驱动气缸带动滑动板15在容纳槽19的内部移动,滑动板15移动时带动驱动杆14同步移动,此时两组驱动杆14伸入无人机的底部;
无人机入库机构包括第一电机7、安装座11、复位弹簧12、驱动杆14、伸缩套管13、夹持气缸16和调节块17,滑动板15的表面通过螺钉固定连接有第一电机7,第一电机7的输出端贯穿于滑动板15的表面,第一电机7的输出端安装有挡板,挡板的表面固定有伸缩套管13,伸缩套管13的一端连接于驱动杆14的表面,驱动杆14与挡板之间固定有复位弹簧12,复位弹簧12套接于伸缩套管13的外壁,滑动板15的表面固定有安装座11,安装座11的底部安装有夹持气缸16,夹持气缸16的输出端安装有调节块17,调节块17靠近驱动杆14的一侧设置有斜面,无线兼容遥控器在驱动杆14伸入无人机底部后控制夹持气缸16启动,夹持气缸16带动调节块17下压,调节块17通过侧边的斜面对驱动杆14进行挤压,使得复位弹簧12和伸缩套管13伸出,此时两组驱动杆14之间的距离减小,然后无线兼容遥控器控制第一电机7驱动,第一电机7通过伸缩套管13和复位弹簧12带动驱动杆14旋转,此时两组驱动杆14与水平面成一定夹角,而且两组驱动杆14将无人机架起,然后无线兼容遥控器控制驱动气缸回缩,驱动气缸通过滑动板15带动驱动杆14复位,此时无人机在重力的作用下开始在驱动杆14表面移动,使无人机逐渐在重力的作用下滑落至无线充电底座4表面;
滑动板15的表面开设有限位槽18,限位槽18设置为弧形结构,驱动杆14的表面开设有限位杆10,限位杆10活动连接于限位槽18的内部,驱动杆14旋转时能够带动限位杆10在限位槽18内部移动并对驱动杆14进行限位;
缓冲机构包括缓冲弹簧6、连接座8和接触板,机巢2的内壁安装有连接座8,连接座8的表面安装有两组缓冲弹簧6,两组缓冲弹簧6固定于接触板的表面,接触板的另一侧粘接有橡胶垫,无人机与接触板发生碰撞时,缓冲弹簧6以及橡胶垫能够对无人机进行缓冲,防止无人机因撞击而导致表面或内部损坏。
工作原理:无人机任务完成后或电量不足时,通过GPS定位器进行定位,通知附近的机巢2打开顶板3,同时无线兼容遥控器控制第二电机21启动,第二电机21通过两组同步带轮和同步带22的传动连接带动螺纹杆23转动,从而使得螺纹杆23带动升降平台9升起,无人机通过识别升降平台9表面的二维码进行降落,然后无线兼容遥控器控制电动滑轨25启动,电动滑轨25带动磁铁板24移动,将无人机进行吸附,然后控制磁铁板24停在升降平台9的正中,此时无线兼容遥控器控制第二电机21反转,升降平台9带动无人机收回至机巢2内部并关闭顶板3;
当顶板3关闭时,无线兼容遥控器控制驱动气缸启动,驱动气缸带动滑动板15在容纳槽19的内部移动,滑动板15移动时带动驱动杆14同步移动,此时两组驱动杆14伸入无人机的底部,然后无线兼容遥控器控制夹持气缸16启动,夹持气缸16带动调节块17下压,调节块17通过侧边的斜面对驱动杆14进行挤压,使得复位弹簧12和伸缩套管13伸出,此时两组驱动杆14之间的距离减小,然后无线兼容遥控器控制第一电机7驱动,第一电机7通过伸缩套管13和复位弹簧12带动驱动杆14旋转,此时两组驱动杆14与水平面成一定夹角,而且两组驱动杆14将无人机架起,驱动杆14旋转时带动限位杆10在限位槽18内部移动并对驱动杆14进行限位,然后无线兼容遥控器控制驱动气缸回缩,驱动气缸通过滑动板15带动驱动杆14复位,此时无人机在重力的作用下开始在驱动杆14表面移动,当无人机与缓冲机构相接触时无线兼容遥控器控制第一电机7反转并控制夹持气缸16复位,从而使无人机停留在无线充电底座4的顶部进行充电。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种无人机无线充电的自动多机位机巢
- 一种可自动充电的无人机机巢