一种腕戴式微型无人侦察机
文献发布时间:2023-06-19 11:16:08
技术领域
本发明涉及无人飞行器与侦察设备领域,具体涉及一种腕戴式微型无人侦察机。
背景技术
目前,侦察机多为大型无人侦察机,飞行高度高、航程远,对工业区、试验场等进行勘察,获取情报以供相关部门决策参考。但是针对小空间、密闭环境、灌木丛等复杂环境的勘查设备较为空缺。而在这种环境中对无人侦察机的性能要求更高,需要其穿过性好、噪声尽量小甚至是无声的、便携性好等。
发明内容
本发明目的是提供一种腕戴式微型无人侦察机,其外形与手表相似,4个微型侦察机单体日常收纳于侦察机舱内,在使用时不同单体搭载不同功能模块,实现相应的侦察功能,通过桨叶和电机实现飞行,从而执行侦察任务。
为实现上述目的,本申请的技术方案为:一种腕戴式微型无人侦察机,包括腕带、用于存放微型侦察机单体的侦察机舱,所述侦察机舱安装在腕带外圈上,佩戴方式同手表;所述微型侦察机单体存放于侦察机舱的限位槽中,实现停放。
进一步的,所述侦查机舱包括舱盖、舱体、限位槽,所述限位槽位于舱体内部,所述舱体固定安装在腕带外圈上,所述舱盖一侧与舱体一侧铰接。
进一步的,所述舱体中设有4个限位槽,每个限位槽中均存放有微型侦察机单体。
进一步的,所述微型侦察机单体包括两组对称设置的涵道、公共涵道进气口、涵道出气口、第一层桨叶、驱动电机a、驱动电机b、第二层桨叶、分流板、信息采集模块,所述涵道顶部均与公共涵道底部连通,所述公共涵道顶部设置一个公共涵道进气口,所述涵道出气口设置在相应涵道底部,方向垂直向下;在公共涵道内设有驱动电机a、驱动电机b,所述驱动电机a与第一层桨叶相连,所述驱动电机b与第二层桨叶相连,所述第一层桨叶位于第二层桨叶上方,在公共涵道下方安装有分流板,所述分流板位于每个涵道入口处,在所述涵道围成的容纳腔中安装有信息采集模块。
进一步的,驱动电机a驱动第一层桨叶旋转,驱动电机b驱动第二层桨叶旋转,两层桨叶相向旋转以抵消旋转带来的扭矩。
更进一步的,通过第一层桨叶、第二层桨叶的旋转,使得空气从公共涵道进气口被吸入,分流板将高速流动的空气分配到4个涵道中,再通过4个涵道出气口将空气垂直向下喷出,从而为侦察机单体提供飞行的升力。
更进一步的,4个涵道以公共涵道为中心圆周布置,相邻涵道之间夹角为 90度。
本发明与已有的方法,在以下方面存在优势:本发明外形与手表相似,其结构简单且新颖,体积小、机动性高、便携性强,不同的单体搭载不同的功能模块,可以利用智能控制实现单体作战、多体协同以及自动巡返行功能,满足了智能化作战的需要。
附图说明
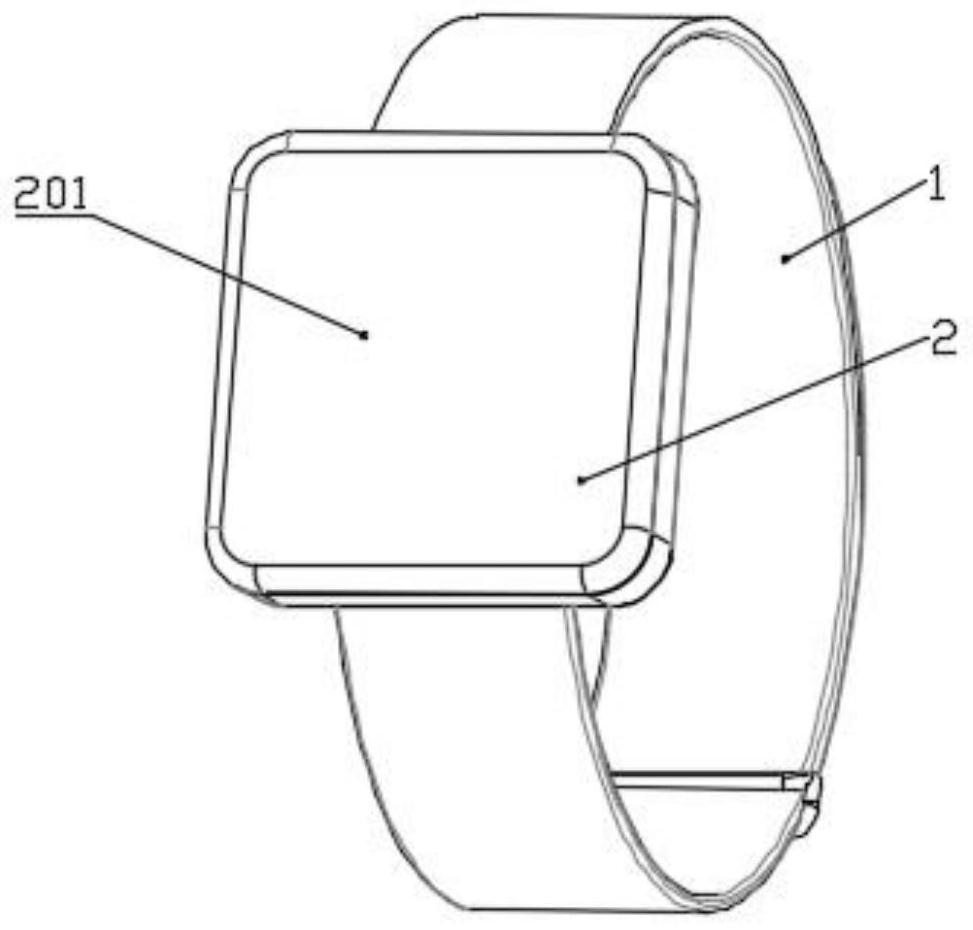
图1为本发明总体结构示意图;
图2为本发明另一状态的总体结构示意图;
图3为图2辅助视图;
图4为本发明的微型侦察机单体放大结构示意图;
图5为本发明的微型侦察机单体内部结构剖视图;
图6为图4辅助视图。
附图标号:1-腕带;2-侦察机舱;3-侦察机单体;201-舱盖;202-舱体;203- 限位槽;301-涵道进气口;302-涵道;303-涵道出气口;304-第一层桨叶;305- 驱动电机a;306-驱动电机b;307-第二层桨叶;308-分流板;309-信息采集模块。
具体实施方式
下面结合附图和具体实施例对本发明作进一步详细的描述:以此为例对本申请做进一步的描述说明。
如图1-6所示,一种腕戴式微型无人侦察机,包括腕带1、侦察机舱2、侦察机单体3,所述侦察机舱2固定安装在腕带1外圈上;4个侦察机单体3存放于侦察机舱2的限位槽中。
所述侦查机舱2包括舱盖201、舱体202、限位槽203,所述舱体202固定安装在腕带1外围上;所述舱盖201一端与舱体202侧面铰接;所述限位槽203 为舱体202内部凹槽用于限定侦察机单体3在舱体202中的位置。
所述微型侦察机单体3包括中心对称设置的涵道302、公共涵道进气口301、涵道出气口303、第一层桨叶304、驱动电机a305、驱动电机b306、第二层桨叶307、分流板308、信息采集模块309,4个涵道顶部均与公共涵道底部连通,所述公共涵道顶部设置一个公共涵道进气口301,所述涵道出气口303设置在相应涵道302底部,方向垂直向下;在公共涵道内设有驱动电机a305、驱动电机b306,所述驱动电机a305与第一层桨叶304相连,所述驱动电机b306与第二层桨叶307相连,所述第一层桨叶304位于第二层桨叶307上方,在公共涵道下方安装有分流板308,所述分流板308位于每个涵道入口处,在所述涵道围成的容纳腔中安装有信息采集模块309。
在本实施例中,侦察机单体3通过侦察机舱2和腕带1戴在使用者手腕上。
在本实施例中,舱盖201与舱体202铰接,可实现侦察机舱2的开合。
在本实施例中,驱动电机a305、驱动电机b306固定安装在公共涵道内部,所述驱动电机a305与第一层桨叶304相连,驱动电机b306固定安装在分流板308与驱动电机a305之间,第二层桨叶307与驱动电机b306相连,通过控制驱动电机a305驱动第一层桨叶旋转,驱动电机b306驱动第二层桨叶307的旋转,两层桨叶相向旋转,推动气流在涵道中流动。
在本实施例中,分流板308固定安装在公共涵道下方,实现进风的分流。
上述腕戴式无人侦察机工作方法为:在执行侦察任务时,通过开合腕带1 将该微型无人侦察机佩戴于手腕上,在需要使用时,打开侦察机舱2的舱盖201, 4个侦察机单体3存放于舱体202的限位槽203中,每个侦察机单体3可以单独飞行也可以协同工作。对于单个侦察机单体3其飞行方式为:驱动电机a305驱动第一层桨叶旋转,驱动电机b306驱动第二层桨叶307的旋转,两层桨叶相向旋转,从而将空气从涵道进气口301吸入,分流板308将高速流动的空气分配到4个涵道302中,再通过4个涵道出气口303将空气垂直向下喷出,从而为侦察机单体3提供飞行的升力,其他3个单体的飞行方式与该单体相同。4个单体搭载有不同的侦查功能的信息采集模块309,可实现不同的侦查功能,执行完任务后个侦察机单体3回到对应的限位槽203中,合上舱盖201等待下一次侦察任务。
以上所述,仅为本发明创造较佳的具体实施方式,但本发明创造的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明创造披露的技术范围内,根据本发明创造的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明创造的保护范围之内。
- 一种腕戴式微型无人侦察机
- 一种腕戴式免洗洗手液装置