一种升降舵调效装置
文献发布时间:2023-06-19 11:19:16
技术领域
本发明属于航空技术领域,特别涉及一种升降舵调效装置
背景技术
对于不可逆操纵系统,驾驶员感受驾驶杆力是由弹簧载荷机构压缩而产生的操纵力,为减轻驾驶员的操纵负担,需要对该操纵力进行抵消。
发明内容
升降舵调效装置分为人工和自动两种工作模式。人工模式用于减小(或消除)飞行员操纵驾驶杆使升降舵弹簧载荷机构压缩而产生的操纵力,减轻飞行员的工作疲劳。自动模式是在自动驾驶仪系统接通时自动卸掉弹簧载荷机构上的力,减小(或消除)自动驾驶仪系统在断开时弹簧载荷机构“卸荷”过程中驾驶杆的突然动作对飞机带来的扰动,以实现断开自动驾驶仪系统时对飞机的无扰动。
本发明技术方案如下:
一种升降舵调效装置,包括:控制盒和调效舵机;
所述控制盒信号输入端接收配平信号,所述控制盒将配平信号处理后输出至调效舵机;
所述调效舵机的输出轴与操纵系统的弹簧载荷机构相连,所述调效舵机用于根据配平信号减小或抵消操纵系统的弹簧载荷机构产生的操纵力。
进一步,所述控制盒包含A和B两个控制通道,所述调效舵机包括A和B两个执行通道,控制盒的A通道输入端和B通道输入端均连接控制盒信号输入端,控制盒的A控制通道输出端与所述调效舵机的A执行通道输入端相连,控制盒的B控制通道输出端与所述调效舵机的B执行通道输入端相连,A和B两个执行通道分别用于控制调效舵机输出轴运动。
进一步,所述装置还包括人工配平开关,所述人工配平开关信号输出端连接控制盒信号输入端并给控制盒发送前向控制信号或后向控制信号,所述前向控制信号或后向控制信号用于控制调效舵机输出轴伸出或收回。
进一步,所述装置还包括综合飞控计算机,综合飞控计算机设有信号输出端与控制盒信号输入端连接,所述综合飞控计算机在飞机自动驾驶系统工作时,自动检测操纵系统弹簧载荷机构产生的操纵力的大小和极性并发送前向配平信号或后向配平信号至控制盒以控制调效舵机输出轴伸出或收回。
进一步,所述装置还包括调效舵机离合器,所述调校舵机离合器的电源开关由驾驶员人工操纵,所述调效舵机离合器与调效舵机相连,所述调效舵机离合器用于人工控制电源开关给调效舵机离合器通电时控制调效舵机输出轴处于松浮状态。
进一步,所述人工配平开关包括左开关和右开关以分别供左驾驶和右驾驶进行操作,所述左开关和右开关的信号输出端分别连接控制盒信号输入端。
进一步,所述控制盒设有控制电路以控制左开关和右开关之间的优先级。
进一步,所述左开关的优先级高于右开关。
本发明提供了一种用于不可逆操纵系统配平驾驶杆力的升降舵调效装置,从而减轻驾驶员负担;同时可减少(或消除)对驾驶仪断开时弹簧载荷机构“卸荷”过程驾驶杆突然动作对飞机带来的扰动。
附图说明
图1升降舵调效装置余度构成示意图;
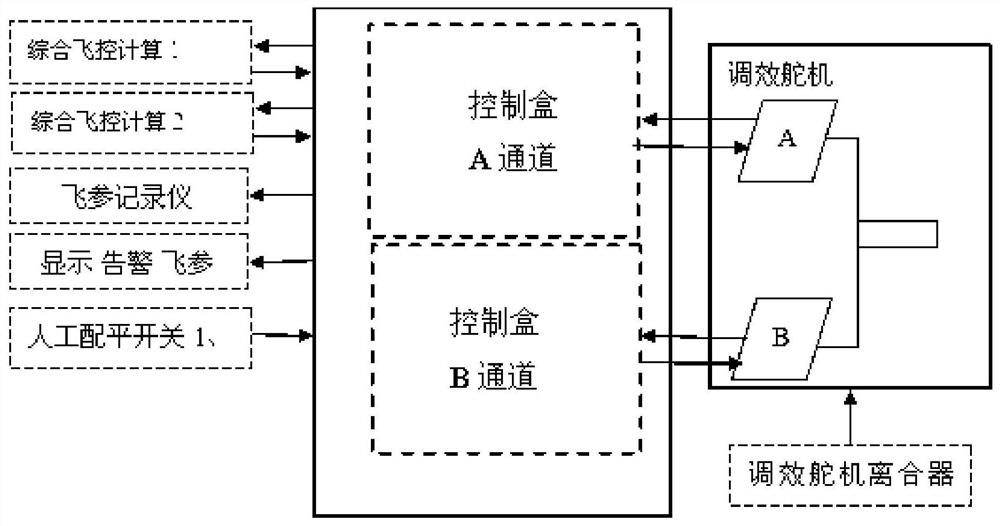
图2升降舵调效装置交联关系示意图。
具体实施方式
升降舵调整片效应机构接收人工配平开关信号和自动飞行控制系统的自动配平信号,经调效控制盒判别、处理、运算放大后,输出给调效舵机卸载驾驶杆上的力,以达到便于飞行员驾驶飞机目的。
升降舵调效装置由调效控制盒、调效舵机组成;升降舵调效装置为双余度,满足一次故障工作,两次故障安全的要求,余度构成见图1所示;升降舵调效装置交联关系见图2所示;
升降舵调效系统有以下3中工作模式:
(1)人工配平
当调效控制盒接收到升降舵人工配平开关前、后向信号后驱动舵机伸出和收回。调效控制盒设置左驾驶优先控制电路,防止左、右驾驶员同时配平出现竞争。
(2)自动配平
在自动驾驶仪系统工作时,调效控制盒接收到综合飞控计算机的“自动配平”接通信号时,进入自动调效工作状态。综合飞控计算机根据驾驶杆力的大小和极性,送出自动调效“前、后向配平”信号,“前、后向配平”有效时控制盒输出驱动信号控制调效舵机。
(3)人工超控
在紧急情况下,飞行员通过机上调效舵机离合器电源开关给调效舵机离合器通电,调效舵机输出轴处于松浮状态,输出轴上施以一定的力,输出轴可以随动;电机通电,输出轴没有输出,驾驶员可超控载荷机构的力来控制飞机,减轻驾驶员的纵向操纵力。
所述装置与弹簧载荷机构交联:向弹簧载荷机构提供位移传感器激励信号,接收弹簧载荷机构提供的位移信号,在控制盒内解调后给综合飞控计算机。
与自动驾驶仪系统交联:接收自动配平接通/断开信号,向自动驾驶仪提供调效机构位置信号、人工杆力配平信号、配平系统状态信号。
与EICAS交联:向EICAS系统提供配平作动器位置信号。
与飞行参数记录器交联:向飞行参数记录器提供配平作动器位置信号。
与集中告警系统交联:向集中告警系统提供系统故障信号,升降舵调效机构一个通道故障注意告警,升降舵调效机构两个通道故障警告告警。
- 一种升降舵调效装置
- 一种卫星高精度有效载荷多自由度微重力装调装置