一种多冗余卫星智能姿控组件及其工作方法
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及航空航天的技术领域,尤其涉及一种多冗余卫星智能姿控组件,以及这种多冗余卫星智能姿控组件的工作方法。
背景技术
卫星、对地观测平台、宇宙飞船、空间望远镜等航天器的姿态控制执行机构要求体积小、重量轻、寿命长、功耗低、可靠性高。目前,作为航天器姿态控制的系统包括:反作用飞轮、磁力矩器、九轴传感器执行机构等;反作用飞轮、磁力矩器,一般采用三个作为一组,分别控制航天器三个轴向的姿态。很显然,当其中一个反作用飞轮或磁力矩器发生故障时,则无法调整该轴向的姿态,从而影响整个航天器的正常工作,严重时会造成航天器的失效。
很显然,在空间中每个方向多几组反作用飞轮,每一组飞轮都能够完整的完成航天器的姿态控制,从而其中一个方向的反作用飞轮失效时,则该方向启用另一个反作用飞轮,而保证完整可靠地完成航天器的姿态控制。反作用飞轮组的数量越多,可靠性越好,即冗余越多航天器姿态控制系统的稳定性越强;然而,并不是简单地增加几组反作用飞轮、磁力矩器就能够解决问题的。发射到天空中的航天器,零部件的重量和体积是航天器设计的一个关键指标,哪怕是多1克或者多1立方厘米制造成本也会显著增加,因此增加几组反作用飞轮、磁力矩器才能既保证航天器姿态控制可靠性,又尽量平衡重量和体积要求,是科研人员面临的重要抉择。另外,反作用飞轮、磁力矩器的放置位置也非常重要,卫星智能姿控组件的主体受到的振动对于调节控制卫星姿态的反作用飞轮、磁力矩器来说是很大的,如何减少反作用飞轮、磁力矩器受到的振动也是科研人员需要着重考虑的。
发明内容
为克服现有技术的缺陷,本发明要解决的技术问题是提供了一种多冗余卫星智能姿控组件,其在尽量少增加组件重量和体积的前提下极大地提高了姿态控制可靠性,在装配上保持组件的整体平衡,大大减少反作用飞轮受到的振动而保证姿态控制准确性。
本发明的技术方案是:这种多冗余卫星智能姿控组件,其包括:箱体(1)、反作用飞轮组(2)、磁力矩器组(3)、磁力矩器线圈(4)、控制板(5)、陀螺仪(6),
箱体上设置磁力矩器线圈安装槽(11)、控制板安装凹槽(12);
反作用飞轮组包括第一反作用飞轮组、第二反作用飞轮组、第三反作用飞轮组、第四反作用飞轮组,这四个反作用飞轮组分别在箱体的四个角落内,每个反作用飞轮组包括X轴反作用飞轮(21)、Y轴反作用飞轮(22)、Z轴反作用飞轮(23),其中X轴反作用飞轮、Y轴反作用飞轮安装在箱体的侧壁上;
磁力矩器组对反作用飞轮进行磁卸载,且包括X轴磁力矩器、Y轴磁力矩器,均安装在箱体的底板上,呈对称分布;
磁力矩器线圈安装在箱体的磁力矩器线圈安装槽内,且为Z轴方向;
控制板在箱体的中心且安装在控制板安装凹槽;
陀螺仪共三个,均安装在箱体内的底板上。
本发明的反作用飞轮组包括第一反作用飞轮组、第二反作用飞轮组、第三反作用飞轮组、第四反作用飞轮组,这四个反作用飞轮组分别在箱体的四个角落内,因此能够在尽量少增加组件重量和体积的前提下极大地提高了姿态控制可靠性,而且在装配上保持整个组件的整体平衡;X轴反作用飞轮、Y轴反作用飞轮安装在箱体的侧壁上,因此能够大大减少反作用飞轮受到的振动而保证姿态控制准确性。
还提供了另外一种多冗余卫星智能姿控组件,其包括:箱体(1)、反作用飞轮组(2)、磁力矩器线圈、控制板(5)、陀螺仪(6),
箱体上设置磁力矩器线圈安装槽、控制板安装凹槽;
反作用飞轮组包括第一反作用飞轮组、第二反作用飞轮组、第三反作用飞轮组、第四反作用飞轮组,这四个反作用飞轮组分别在箱体的四个角落内,每个反作用飞轮组包括X轴反作用飞轮、Y轴反作用飞轮、Z轴反作用飞轮,其中X轴反作用飞轮、Y轴反作用飞轮安装在箱体的侧壁上;
磁力矩器线圈对反作用飞轮进行磁卸载,且包括X轴磁力矩器线圈(41)、Y轴磁力矩器线圈(42)、Z轴磁力矩器线圈(43),X轴磁力矩器线圈、Y轴磁力矩器线圈安装在箱体的侧壁上,Z轴磁力矩器线圈安装在箱体的磁力矩器线圈安装槽内;
控制板在箱体的中心且安装在控制板安装凹槽;
陀螺仪共三个,均安装在箱体内的底板上。
这种组件磁力矩器全部使用磁力矩器线圈,即X轴磁力矩器线圈、Y轴磁力矩器线圈、Z轴磁力矩器线圈,因为磁力矩器线圈的形状可以根据要求而变化,因此能够增加其他零部件的安装空间,而且在装配上保持整个组件的整体平衡;X轴磁力矩器线圈、Y轴磁力矩器线圈安装在箱体的侧壁上,还能够大大减少磁力矩器受到的振动而保证姿态控制准确性;反作用飞轮组包括第一反作用飞轮组、第二反作用飞轮组、第三反作用飞轮组、第四反作用飞轮组,这四个反作用飞轮组分别在箱体的四个角落内,因此能够在尽量少增加组件重量和体积的前提下极大地提高了姿态控制可靠性,而且在装配上保持整个组件的整体平衡;X轴反作用飞轮、Y轴反作用飞轮安装在箱体的侧壁上,因此能够大大减少反作用飞轮受到的振动而保证姿态控制准确性。
还提供了一种多冗余卫星智能姿控组件的工作方法,其包括以下步骤:
(1)通过卫星内部的集成惯性导航组件获取当前姿态数据;
(2)智能姿控组件通过控制板与卫星内部的星载计算机进行通信获取当前目标姿态数据;
(3)通过控制板中的算法控制智能姿控组件中反作用飞轮和磁力矩器;
(4)通过磁力矩器产生的磁场与地磁场相互作用进行初步调姿,同时,当反作用飞轮转速饱和时进行磁卸载;
(5)通过反作用飞轮进行精准调姿,从而有效的控制卫星姿态。
附图说明
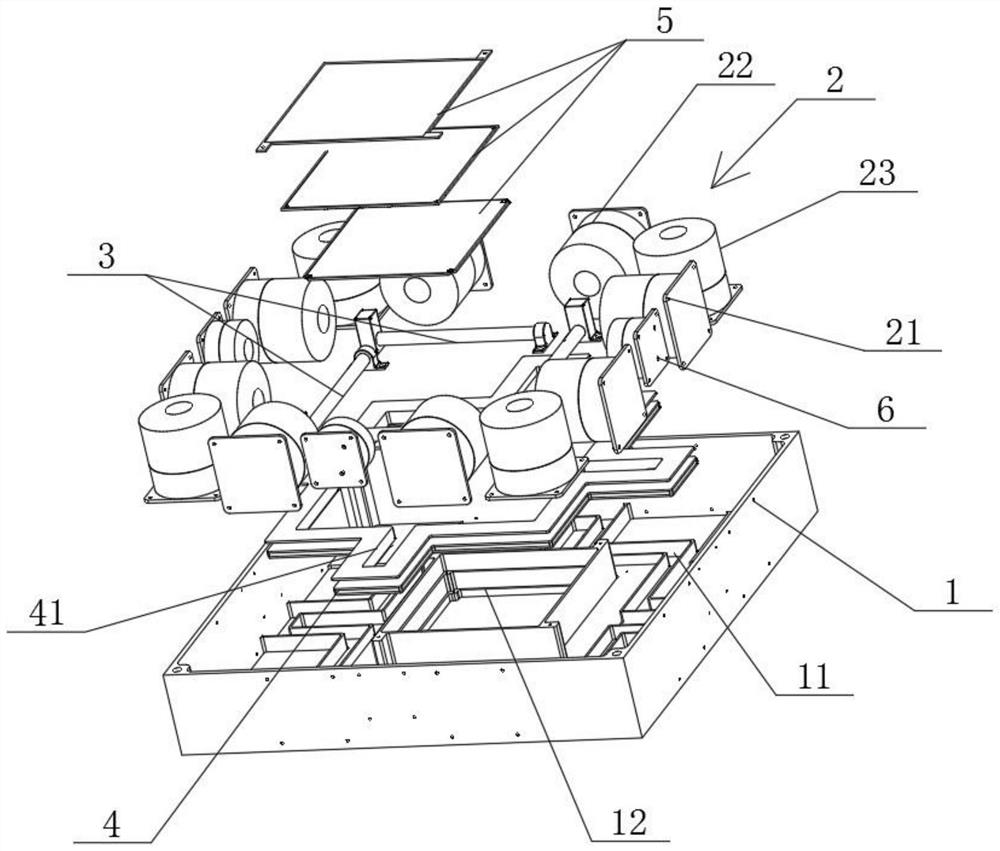
图1示出了根据本发明的第一种多冗余卫星智能姿控组件的拆分结构示意图。
图2示出了图1的多冗余卫星智能姿控组件的俯视图。
图3示出了根据本发明的第二种多冗余卫星智能姿控组件的拆分结构示意图。
图4示出了图3的多冗余卫星智能姿控组件的俯视图。
图5示出了根据本发明的第三种多冗余卫星智能姿控组件的拆分结构示意图。
图6示出了图5的多冗余卫星智能姿控组件的俯视图。
图7示出了根据本发明的第四种多冗余卫星智能姿控组件的拆分结构示意图。
图8示出了图7的多冗余卫星智能姿控组件的俯视图。
具体实施方式
如图1所示,这种多冗余卫星智能姿控组件,其包括:箱体1、反作用飞轮组2、磁力矩器组3、磁力矩器线圈4、控制板5、陀螺仪6,
箱体上设置磁力矩器线圈安装槽11、控制板安装凹槽12;
反作用飞轮组包括第一反作用飞轮组、第二反作用飞轮组、第三反作用飞轮组、第四反作用飞轮组,这四个反作用飞轮组分别在箱体的四个角落内,每个反作用飞轮组包括X轴反作用飞轮21、Y轴反作用飞轮22、Z轴反作用飞轮23,其中X轴反作用飞轮、Y轴反作用飞轮安装在箱体的侧壁上;
磁力矩器组对反作用飞轮进行磁卸载,且包括X轴磁力矩器、Y轴磁力矩器,均安装在箱体的底板上,呈对称分布;
磁力矩器线圈安装在箱体的磁力矩器线圈安装槽内,且为Z轴方向;
另外,磁力矩器线圈还设置了磁力矩器线圈盖板41来防止灰尘杂质进入磁力矩器线圈内,并且用于固定磁力矩器线圈,防止振动时磁力矩器线圈跳出磁力矩器线圈安装槽;
控制板在箱体的中心且安装在控制板安装凹槽;
陀螺仪共三个,均安装在箱体内的底板上。
本发明的反作用飞轮组包括第一反作用飞轮组、第二反作用飞轮组、第三反作用飞轮组、第四反作用飞轮组,这四个反作用飞轮组分别在箱体的四个角落内,因此能够在尽量少增加组件重量和体积的前提下极大地提高了姿态控制可靠性,而且在装配上保持整个组件的整体平衡;X轴反作用飞轮、Y轴反作用飞轮安装在箱体的侧壁上,因此能够大大减少反作用飞轮受到的振动而保证姿态控制准确性。
优选地,如图1、2所示,所有反作用飞轮采用底部外法兰盘安装,所述Z轴反作用飞轮均安装在箱体内的底板上。
优选地,如图3、4所示,所述反作用飞轮采用侧方定位孔安装,定义反作用飞轮上的电连接器为正面,在其背面的棱柱上设有安装定位孔,X轴反作用飞轮、Y轴反作用飞轮、Z轴反作用飞轮均安装在箱体的侧壁上。因为X轴反作用飞轮、Y轴反作用飞轮、Z轴反作用飞轮均安装在箱体的侧壁上,这样能够最大限度地减少反作用飞轮受到的振动而保证姿态控制准确性,而且能充分利用箱体的空间。
优选地,如图1、4所示,所述X轴磁力矩器、Y轴磁力矩器的数量均为2个,都位于磁力矩器线圈的上方。这样能充分利用箱体的空间。
图1所示控制板包括三层。或者,类似于图2、3所示,所述控制板包括:底层控制板、顶层控制板,分别安装在底层的控制板安装凹槽、顶层的控制板安装凹槽内,两层之间通过电连接器连接。
优选地,如图1所示,每个陀螺仪安装一个保护罩,保护罩固定在箱体的侧壁。
或者,如图4所示,三个陀螺仪共用一个保护罩,保护罩安装的箱体的底板上。
如图2、3所示,还提供了另外一种多冗余卫星智能姿控组件,其包括:箱体1、反作用飞轮组2、磁力矩器线圈、控制板5、陀螺仪6,
箱体上设置磁力矩器线圈安装槽、控制板安装凹槽;
反作用飞轮组包括第一反作用飞轮组、第二反作用飞轮组、第三反作用飞轮组、第四反作用飞轮组,这四个反作用飞轮组分别在箱体的四个角落内,每个反作用飞轮组包括X轴反作用飞轮、Y轴反作用飞轮、Z轴反作用飞轮,其中X轴反作用飞轮、Y轴反作用飞轮安装在箱体的侧壁上;
磁力矩器线圈对反作用飞轮进行磁卸载,且包括X轴磁力矩器线圈41、Y轴磁力矩器线圈42、Z轴磁力矩器线圈43,X轴磁力矩器线圈、Y轴磁力矩器线圈安装在箱体的侧壁上,Z轴磁力矩器线圈安装在箱体的磁力矩器线圈安装槽内;
控制板在箱体的中心且安装在控制板安装凹槽;
陀螺仪共三个,均安装在箱体内的底板上。
这种组件磁力矩器全部使用磁力矩器线圈,即X轴磁力矩器线圈、Y轴磁力矩器线圈、Z轴磁力矩器线圈,因为磁力矩器线圈的形状可以根据要求而变化,因此能够增加其他零部件的安装空间,而且在装配上保持整个组件的整体平衡;X轴磁力矩器线圈、Y轴磁力矩器线圈安装在箱体的侧壁上,还能够大大减少磁力矩器受到的振动而保证姿态控制准确性;反作用飞轮组包括第一反作用飞轮组、第二反作用飞轮组、第三反作用飞轮组、第四反作用飞轮组,这四个反作用飞轮组分别在箱体的四个角落内,因此能够在尽量少增加组件重量和体积的前提下极大地提高了姿态控制可靠性,而且在装配上保持整个组件的整体平衡;X轴反作用飞轮、Y轴反作用飞轮安装在箱体的侧壁上,因此能够大大减少反作用飞轮受到的振动而保证姿态控制准确性。
优选地,所述X轴磁力矩器线圈、Y轴磁力矩器线圈通过支架安装在箱体的侧壁上,或者所述箱体侧壁的外侧上还设有X轴向安装槽和Y轴向安装槽,用于安装X轴磁力矩器线圈、Y轴磁力矩器线圈。
还提供了一种多冗余卫星智能姿控组件的工作方法,其包括以下步骤:
(1)通过卫星内部的集成惯性导航组件获取当前姿态数据;
(2)智能姿控组件通过控制板与卫星内部的星载计算机进行通信获取当前目标姿态数据;
(3)通过控制板中的算法控制智能姿控组件中反作用飞轮和磁力矩器;
(4)通过磁力矩器产生的磁场与地磁场相互作用进行初步调姿,同时,当反作用飞轮转速饱和时进行磁卸载;
其中磁力矩器的调姿根据公式(1)进行:
T=B×M (1)
其中T磁力矩、B外部磁场强度(比如地磁场)、M磁矩(与磁力矩器产品的设计有关,是定值);当外部磁场B与磁力矩器的磁矩M呈90°时,所产生的磁力矩T最大。
(5)通过反作用飞轮进行精准调姿,从而有效的控制卫星姿态。
其中反作用飞轮的调姿根据公式(2)进行:
T=△W·J (2)
其中T为力矩、△W是转速增量、J为转动惯量(与反作用飞轮的设计有关,是定值);当△W转速增量越大,产生的力矩越大。
以上所述,仅是本发明的较佳实施例,并非对本发明作任何形式上的限制,凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属本发明技术方案的保护范围。
- 一种多冗余卫星智能姿控组件及其工作方法
- 一种阵列式卫星智能姿控组件及其工作方法