一种可为楼体墙面补漆的多旋翼无人机
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及一种飞行器领域,更具体的说是一种可为楼体墙面补漆的多旋翼无人机。
背景技术
楼体外墙体漆日久脱落是常见的问题,小面积脱落不论是从经济角度还是安全角度都不建议人工修补,基于上述原因,发明了本设备。
发明内容
本发明的目的是提供一种可为楼体墙面补漆的多旋翼无人机,可以通过远程操控为高层建筑墙面进行补漆。
本发明的目的通过以下技术方案来实现:
一种可为楼体墙面补漆的多旋翼无人机,包括飞行组合体和涂漆组合体,其特征在于:所述飞行组合体与涂漆组合体相连接。
作为本技术方案的进一步优化,本发明一种可为楼体墙面补漆的多旋翼无人机,所述飞行组合体包括无人机支架、中心盘、旋翼支架、飞行电机支架、飞行电机、旋翼、电池、电池支架、通风口、扇叶罩、鼓风电机、鼓风扇叶、旋转进风口、储液室、滑架、限位底板、滑动阀、弹簧、磁铁滑动室、滑槽、磁铁和曲簧,无人机支架与中心盘相连接,中心盘与四个旋翼支架相连接,每个旋翼支架均与飞行电机支架相连接,飞行电机支架与飞行电机相连接,飞行电机与旋翼相连接,电池与电池支架相连接,电池支架上设有通风口,电池支架与扇叶罩相连接,扇叶罩与中心盘相连接,鼓风电机与电池支架相连接,鼓风电机与鼓风扇叶相连接,旋转进风口与中心盘相连接,旋转进风口与储液室相连接,滑架与储液室内部相连接,滑架与限位底板相连接,滑动阀与滑架滑动连接,弹簧两端分别与滑动阀、限位底板相连接,弹簧处于压缩状态,磁铁滑动室位于储液室内,所有磁铁均与磁铁滑动室滑动连接,相邻磁铁通过曲簧相连接,曲簧处于常态,滑槽位于储液室外壁上。
作为本技术方案的进一步优化,本发明一种可为楼体墙面补漆的多旋翼无人机,所述涂漆组合体包括旋转支架、行走轮支架、行走电机、行走轮、出液支架、毛刷固定板Ⅰ、吸液管、中心管、出液分管、毛刷固定板Ⅱ和毛刷,旋转支架与滑槽滑动连接,旋转支架与中心盘相接触,旋转支架与四个行走轮支架相连接,每个行走轮支架分别与一个行走电机相连接,行走电机与行走轮相连接,相邻两个行走轮相互垂直设置,旋转支架与两个出液支架相连接,两个出液支架均与毛刷固定板Ⅰ相连接,两个吸液管均与中心管相连接并联通,中心管与储液室转动连接,中心管与出液分管相连接并联通,出液分管与毛刷固定板Ⅰ、毛刷固定板Ⅱ相连接,毛刷固定板Ⅰ与毛刷固定板Ⅱ相连接,毛刷固定板Ⅰ、毛刷固定板Ⅱ均与毛刷相连接。
作为本技术方案的进一步优化,本发明一种可为楼体墙面补漆的多旋翼无人机,所述的电池通过连接线与飞行电机、鼓风电机、行走电机相连接,电池支架上还设有信号接收器。
作为本技术方案的进一步优化,本发明一种可为楼体墙面补漆的多旋翼无人机,所述旋转支架与滑槽接触部分材料为铁磁性金属。
本发明一种可为楼体墙面补漆的多旋翼无人机的有益效果为:控制飞行组合体可控制无人机飞行、转向、偏斜,当无人机来到指定高度后,通过控制飞行电机转速控制无人机偏斜,行走轮与墙体接触,加大飞行电机转速使旋翼向与墙面垂直方向加速鼓风,旋翼对行走轮施加向墙体方向的力,设备与墙面完全平行,此时通过控制对应方向行走轮的行走,控制设备运动方向,当设备运动至补漆位置,控制鼓风扇叶转动,涂料喷涂至墙面被运动的毛刷涂抹均匀,完成补漆。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
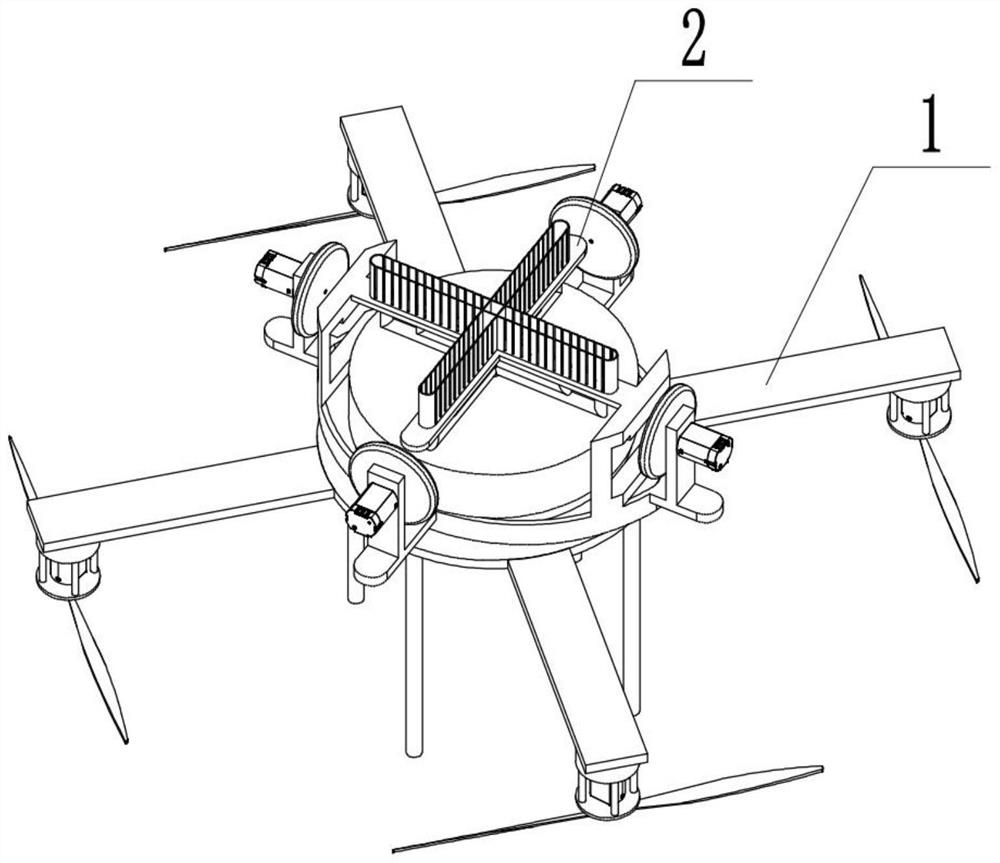
图1是本发明的整体结构示意图;
图2是本发明飞行组合体1的结构示意图一;
图3是本发明飞行组合体1的结构剖视图;
图4是本发明飞行组合体1的结构放大示意图;
图5是本发明飞行组合体1的结构示意图二;
图6是本发明涂漆组合体2的结构示意图一;
图7是本发明涂漆组合体2的结构剖视图;
图8是本发明涂漆组合体2的结构示意图二。
图中:飞行组合体1;无人机支架1-1;中心盘1-2;旋翼支架1-3;飞行电机支架1-4;飞行电机1-5;旋翼1-6;电池1-7;电池支架1-8;通风口1-9;扇叶罩1-10;鼓风电机1-11;鼓风扇叶1-12;旋转进风口1-13;储液室1-14;滑架1-15;限位底板1-16;滑动阀1-17;弹簧1-18;磁铁滑动室1-19;滑槽1-20;磁铁1-21;曲簧1-22;涂漆组合体2;旋转支架2-1;行走轮支架2-2;行走电机2-3;行走轮2-4;出液支架2-5;毛刷固定板Ⅰ2-6;吸液管2-7;中心管2-8;出液分管2-9;毛刷固定板Ⅱ2-10;毛刷2-11。
具体实施方式
下面结合附图对本发明作进一步详细说明。
本装置中所述的固定连接是指通过焊接、螺纹固定等方式进行固定,结合不同的使用环境,使用不同的固定方式;所述的转动连接是指通过将轴承烘装在轴上,轴或轴孔上设置有弹簧挡圈槽,通过将弹性挡圈卡在挡圈槽内实现轴承的轴向固定,实现转动;所述的滑动连接是指通过滑块在滑槽或导轨内的滑动进行连接,滑槽或导轨一般为阶梯状,防止滑块在滑槽或导轨内发生脱落;所述的铰接是指通过在铰链、销轴和短轴等连接零件上进行活动的连接方式;所需密封处均是通过密封圈或O形圈实现密封。
具体实施方式一:
下面结合图1-8说明本实施方式,一种可为楼体墙面补漆的多旋翼无人机,包括飞行组合体1和涂漆组合体2,其特征在于:所述飞行组合体1与涂漆组合体2相连接。
具体实施方式二:
下面结合图1-8说明本实施方式,本实施方式对实施方式一作进一步说明,所述飞行组合体1包括无人机支架1-1、中心盘1-2、旋翼支架1-3、飞行电机支架1-4、飞行电机1-5、旋翼1-6、电池1-7、电池支架1-8、通风口1-9、扇叶罩1-10、鼓风电机1-11、鼓风扇叶1-12、旋转进风口1-13、储液室1-14、滑架1-15、限位底板1-16、滑动阀1-17、弹簧1-18、磁铁滑动室1-19、滑槽1-20、磁铁1-21和曲簧1-22,无人机支架1-1与中心盘1-2相连接,中心盘1-2与四个旋翼支架1-3相连接,每个旋翼支架1-3均与飞行电机支架1-4相连接,飞行电机支架1-4与飞行电机1-5相连接,飞行电机1-5与旋翼1-6相连接,电池1-7与电池支架1-8相连接,电池支架1-8上设有通风口1-9,电池支架1-8与扇叶罩1-10相连接,扇叶罩1-10与中心盘1-2相连接,鼓风电机1-11与电池支架1-8相连接,鼓风电机1-11与鼓风扇叶1-12相连接,旋转进风口1-13与中心盘1-2相连接,旋转进风口1-13与储液室1-14相连接,滑架1-15与储液室1-14内部相连接,滑架1-15与限位底板1-16相连接,滑动阀1-17与滑架1-15滑动连接,弹簧1-18两端分别与滑动阀1-17、限位底板1-16相连接,弹簧1-18处于压缩状态,磁铁滑动室1-19位于储液室1-14内,所有磁铁1-21均与磁铁滑动室1-19滑动连接,相邻磁铁通过曲簧1-22相连接,曲簧1-22处于常态,滑槽1-20位于储液室1-14外壁上,控制飞行组合体可控制无人机飞行、转向、偏斜,设备与墙面平行轴可控制设备运动方向。
具体实施方式三:
下面结合图1-8说明本实施方式,本实施方式对实施方式一作进一步说明,所涂漆组合体2包括旋转支架2-1、行走轮支架2-2、行走电机2-3、行走轮2-4、出液支架2-5、毛刷固定板Ⅰ2-6、吸液管2-7、中心管2-8、出液分管2-9、毛刷固定板Ⅱ2-10和毛刷2-11,旋转支架2-1与滑槽1-20滑动连接,旋转支架2-1与中心盘1-2相接触,旋转支架2-1与四个行走轮支架2-2相连接,每个行走轮支架2-2分别与一个行走电机2-3相连接,行走电机2-3与行走轮2-4相连接,相邻两个行走轮2-4相互垂直设置,旋转支架2-1与两个出液支架2-5相连接,两个出液支架2-5均与毛刷固定板Ⅰ2-6相连接,两个吸液管2-7均与中心管2-8相连接并联通,中心管2-8与储液室1-14转动连接,中心管2-8与出液分管2-9相连接并联通,出液分管2-9与毛刷固定板Ⅰ2-6、毛刷固定板Ⅱ2-10相连接,毛刷固定板Ⅰ2-6与毛刷固定板Ⅱ2-10相连接,毛刷固定板Ⅰ2-6、毛刷固定板Ⅱ2-10均与毛刷2-11相连接,当设备运动至补漆位置,控制鼓风扇叶转动,涂料喷涂至墙面被运动的毛刷涂抹均匀,完成补漆。
具体实施方式四:
下面结合图1-8说明本实施方式,本实施方式对实施方式一作进一步说明,所述电池1-7通过连接线与飞行电机1-5、鼓风电机、行走电机相连接,电池支架1-8上还设有信号接收器。
具体实施方式五:
下面结合图1-8说明本实施方式,本实施方式对实施方式一作进一步说明,所述旋转支架2-1与滑槽1-20接触部分材料为铁磁性金属。
本发明的一种可为楼体墙面补漆的多旋翼无人机,其工作原理为:无人机置于地面时四个无人机支架1-1与地面接触支撑整个无人机,添加涂料时,翻转无人机,将涂料管经通风口1-9、旋转进风口1-13插入储液室1-14内,滑动阀1-17在滑架1-15上滑动,弹簧1-18压缩,涂料注入储液室1-14内后拔出涂料管即可,在弹簧1-18的推力作用下,滑动阀1-17复位,回正无人机,控制四个飞行电机1-5同时等速转动,飞行电机1-5带动旋翼1-6转动,四个旋翼1-6向下方产生推力,带动整个无人机升起,当无人机飞到指定补漆范围附近后,控制墙面侧的两个飞行电机1-5停止转动,剩余两个旋翼向下推力减小,在无人机自重的作用下,无人机向墙面倾斜偏移,当行走轮2-4与墙面相接触后,同时加速开启所有飞行电机1-5,四个旋翼1-6向与墙面相反的方向产生推力,这个推力带动四个行走轮2-4与墙面并紧紧接触并带动机体与墙面保持平行,此时控制两组相对的行走电机2-3同时转动带动两个行走轮2-4同时转动,即可通过行走轮支架2-2、旋转支架2-1带动储液室1-14运动进而带动整个机体在墙面上运动,四个行走轮2-4材质均为硬质材料,与墙面摩擦小,另两组不转动的行走轮2-4不会因为摩擦力而对运动造成影响,通过切换行走电机2-3的转动来控制机体在墙壁上的行进方向,当机体与墙面保持平行,磁铁滑动室1-19中的磁铁1-21在重力作用下聚集到磁铁滑动室1-19最下方,下方曲簧1-22压缩,上方曲簧1-22拉伸,下方磁力增大,因为旋转支架2-1与滑槽1-20接触部分材料为铁磁性金属,下方磁力增大带动旋转支架2-1铁磁性金属部分运动,旋转支架2-1绕滑槽1-20转动,旋转支架2-1通过行走轮支架2-2带动行走轮2-4转动,这样保证了无论旋翼1-6与机体处于什么角度行走轮2-4行进方向始终与地面垂直或平行,旋转支架2-1通过出液支架2-5、毛刷固定板Ⅰ2-6、毛刷固定板Ⅱ2-10带动吸液管2-7与毛刷2-11转动,这样保证了无论无论旋翼1-6与机体处于什么角度毛刷2-11总会与地面垂直或平行,总会有一个吸液管2-7与地面垂直并插入涂料内,来到待补漆地点,开启鼓风电机1-11,鼓风电机1-11带动鼓风扇叶1-12转动通过旋转进风口1-13向滑动阀1-17鼓风,滑动阀1-17沿滑架1-15滑动,气体进入储液室1-14内,储液室1-14内压力增大,涂料进插入涂料的吸液管2-7进入中心管2-8内,又经中心管2-8进入出液分管2-9继而喷至墙面被行走的毛刷2-11均匀的涂抹至墙面完成修补,回收时停止相邻的两个飞行电机1-5转动使机体失衡,机体就会从墙面脱落,然后继续正常操作无人机即可完成回收。
当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
- 一种可为楼体墙面补漆的多旋翼无人机
- 一种油漆墙面检测补漆方法