仿生蜻蜓扑翼机构
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及飞行器技术领域,具体涉及一种仿生蜻蜓扑翼机构。
背景技术
近年来,随着对昆虫飞行机理的深入了解和不断完善的空气动力学,以及相关的微电子机械技术、性能优异的新型材料、微电子控制系统技术、仿生学、空气动力学、动力及能源系统、导航系统等快速发展,仿生蜻蜓扑翼相关的技术已经成为一个前沿科技的研究课题,尤其是在军事领域和民用领域均具有潜在的应用前景。
相关技术中,仿生蜻蜓扑翼飞行器结构复杂,动力传递效率低,并且功能单一。
发明内容
本发明为解决上述技术问题,提供了一种仿生蜻蜓扑翼机构,结构紧凑,动力传递效率高,并且,该仿生蜻蜓扑翼机构不仅能够实现悬停、转弯、加速等基本飞行方式,而且能够在飞行中改变翅翼扑动的振幅。
本发明采用的技术方案如下:
一种仿生蜻蜓扑翼机构,其特征在于,包括:对称设置的机身、设置在所述机身侧面的N个驱动装置以及与所述N个驱动装置对应设置的N个翅翼,N为大于或等于4的偶数;其中,所述机身的内腔设置有动力单元和传动单元,所述动力单元用于产生动力,所述传动单元用于传递所述动力;所述N个驱动装置用于根据所述传动单元传递的动力驱动对应的翅翼工作,并对所述翅翼的振幅进行调节。
所述驱动装置包括:所述驱动装置包括:小圆筒,所述小圆筒与所述大圆筒相连;移动块,所述移动块与所述小圆筒相连;翅膀支架,所述翅膀支架的一端与所述移动块铰接,所述翅膀支架的另一端与所述翅翼铰接,所述翅膀支架内设置有第一凹槽;弯曲轴,所述弯曲轴与所述传动单元相连,其中,所述弯曲轴通过第一滚珠与所述第一凹槽相扣合,所述弯曲轴用于根据所述传动单元传递的动力带动所述翅翼工作。
所述小圆筒上设置有抛物线凹槽,所述移动块内部设置有直线槽,所述抛物线凹槽与所述直线槽通过第二滚珠相连。
所述驱动装置还包括:所述驱动装置还包括:曲柄,所述曲柄的一端与所述舵机相连;拉杆,所述拉杆的一端与所述曲柄的另一端相连,所述拉杆的另一端与所述小圆筒的尾部相连。
所述驱动装置还包括:旋转齿轮,所述旋转齿轮套在所述小圆筒上,其中,所述旋转齿轮与所述移动块相连。
本发明的有益效果:
本发明结构紧凑,动力传递效率高,并且,该仿生蜻蜓扑翼机构不仅能够实现悬停、转弯、加速等飞行方式,而且能够改变飞行时翅翼扑动的振幅。
附图说明
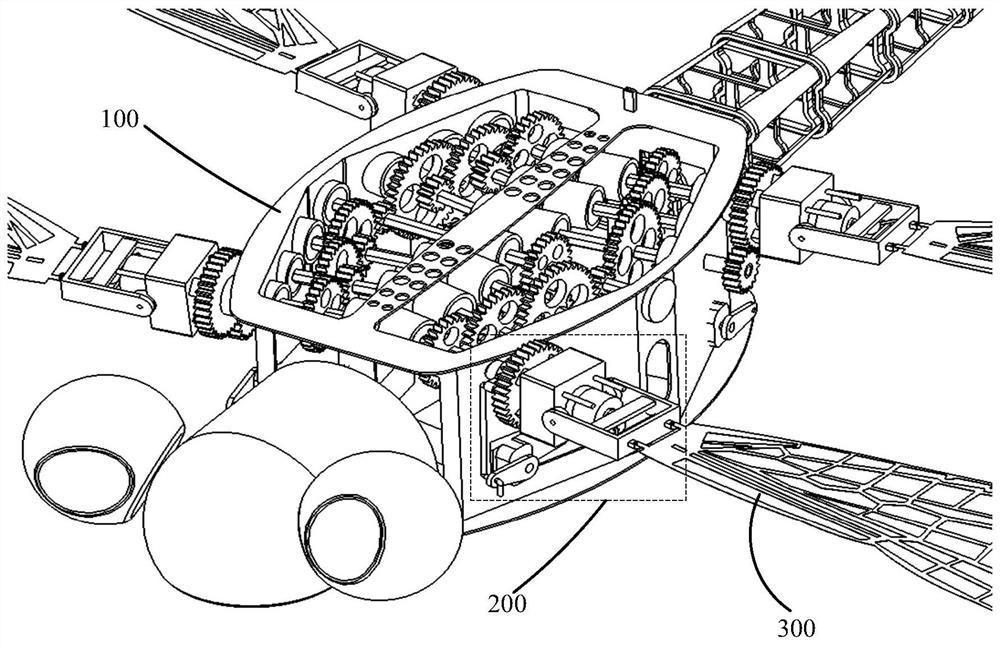
图1为本发明实施例的仿生蜻蜓扑翼机构的结构示意图;
图2为本发明一个实施例的驱动装置的结构示意图;
图3为本发明一个实施例的小圆筒的结构示意图;
图4为本发明一个实施例的仿生蜻蜓扑翼机构的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
图1是根据本发明实施例的仿生蜻蜓扑翼机构的结构示意图。
如图1所示,本发明实施例的仿生蜻蜓扑翼机构可包括:对称设置的机身100、设置在机身100侧面的N个驱动装置200以及与N个驱动装置200对应设置的N个翅翼300,N为大于或等于4的偶数;其中,机身100的内腔设置有动力单元和传动单元,动力单元用于产生动力,传动单元用于传递动力;N个驱动装置200用于根据传动单元传递的动力驱动对应的翅翼300工作,并对翅翼300的振幅进行调节。
具体而言,如图1所示,机身100呈对称设置,机身100中对称设置有传动单元(动力单元未在图1中示出),机身100侧面设置有N个驱动装置200(图1中仅示出4个),并且每个驱动装置200对应设置有一个翅翼300与其相连。在实际运行中,可先通过动力单元(包括驱动电机)输出动力,并通过传动单元将该动力传递到驱动装置200,例如,可通过齿轮啮合的方式并采用传动轴(如,采用三级减速齿轮组)进行传动。此时,驱动装置200可根据传动单元传递的动力驱动对应的翅翼300工作,并对翅翼300的振幅进行调节。
根据本发明的一个实施例,如图2所示,驱动装置200可包括:大圆筒210、小圆筒220、移动块230、翅膀支架240和弯曲轴(图2中未具体示出)。
其中,大圆筒210设置在机身侧面;小圆筒220与大圆筒210相连;移动块230与小圆筒220相连;翅膀支架240的一端与移动块230铰接,翅膀支架240的另一端与翅翼300铰接,翅膀支架240内设置有第一凹槽;弯曲轴与传动单元相连,其中,弯曲轴通过第一滚珠250与第一凹槽相扣合,其中,第一滚珠250可卡在第一凹槽内,弯曲轴用于根据传动单元传递的动力带动翅翼工作。
根据本发明的一个实施例,小圆筒220上设置有抛物线凹槽(如图3所示),移动块230内部设置有直线槽,抛物线凹槽与直线槽通过第二滚珠相连。
根据本发明的一个实施例,如图4所示,驱动装置200还包括:舵机260、曲柄270和拉杆280。其中,舵机260设置在机身100侧面;曲柄270的一端与舵机260相连;拉杆280的一端与曲柄270的另一端相连,拉杆280的另一端与小圆筒220的尾部相连。
具体而言,上述传动轴可包括弯曲轴,该弯曲轴可旋转并且穿插深入机身100内腔,翅翼300的根部设置有与弯曲轴的倾斜端相卡合而联动的摇摆副,其中,仿生蜻蜓身体内部的传动单元(例如,传动齿轮)可将动力传递到翅翼300根部的弯曲轴上,弯曲轴可通过第一滚珠250与翅膀支架240内的第一凹槽相扣合,从而带动翅翼300上下扑动。
进一步而言,还可通过舵机260带动曲柄270转动,以通过拉杆280带动小圆筒220旋转,此时,由于小圆筒220上设置的抛物线凹槽通过第二滚珠与移动块230内部的直线槽相连接,因此,可将小圆筒220的旋转运动转化为移动块230的往复直线运动。其中,当移动块230向后移动时,可带动翅膀支架240内的第一滚珠250在弯曲轴上向后移动,从而减小弯曲轴所带动翅翼300扑动的幅度,此时,飞行方式也相应的发生改变;当移动块230向前移动时,可带动翅膀支架240内的第一滚珠250在弯曲轴上向前移动,从而加大弯曲轴所带动翅翼300扑动的幅度。由此,通过移动块230与小圆筒220上的抛物线凹槽相扣合,实现翅翼的伸缩,并改变翅翼扑动的振幅。
根据本发明的一个实施例,如图2和4所示,驱动装置200还包括旋转齿轮290,其中,旋转齿轮290套在小圆筒220上,其中,旋转齿轮290与移动块230相连。
具体而言,还可通过控制旋转齿轮290旋转,以带动移动块230旋转,从而改变翅翼300的倾斜角度,进而改变仿生蜻蜓扑翼机构飞行攻角。
由此,本发明的仿生蜻蜓扑翼机构结构紧凑,传动高效,驱动力的传递平稳,传动稳定,能够直接将旋转运动转化为直线往复运动,并且中间转化部件少,能量的损耗低,提高力传递效率,在满足飞行的情况下大大提高了机构运行的平稳性,制造成本低。并且,本发明改变传统扑翼结构只能做上下扑动、振幅不变的这单一功能,更加符合蜻蜓真实的飞行动作,真正做到对蜻蜓的仿生,提高了飞行的稳定性。另外,本发明的驱动结构、翅膀扑翼机构和翅膀旋转机构可模块化地安装在机架上,便于检测维修以及改装,降低了制造成本,也为后续新技术应用以及更新换代预留发展空间。
综上所述,根据本发明实施例的仿生蜻蜓扑翼机构,包括:对称设置的机身、设置在机身侧面的N个驱动装置以及与N个驱动装置对应设置的N个翅翼,N为大于或等于4的偶数,其中,通过机身的内腔设置的动力单元产生动力,并通过机身的内腔设置的传动单元传递动力,以及通过N个驱动装置根据传动单元传递的动力驱动对应的翅翼工作,并对翅翼的振幅进行调节。由此,该仿生蜻蜓扑翼机构结构紧凑,动力传递效率高,并且,该仿生蜻蜓扑翼机构不仅能够实现悬停、转弯、加速等飞行方式,而且能够在飞行中改变翅翼扑动的振幅。
在本发明中,除非另有明确的规定和限定,术语“相连”、“连接”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必针对相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
应当理解,本发明的各部分可以用硬件、软件、固件或它们的组合来实现。在上述实施方式中,多个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现。例如,如果用硬件来实现,和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或他们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(PGA),现场可编程门阵列(FPGA)等。
此外,在本发明各个实施例中的各功能单元可以集成在一个处理模块中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个模块中。上述集成的模块既可以采用硬件的形式实现,也可以采用软件功能模块的形式实现。所述集成的模块如果以软件功能模块的形式实现并作为独立的产品销售或使用时,也可以存储在一个计算机可读取存储介质中。
上述提到的存储介质可以是只读存储器,磁盘或光盘等。尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
- 仿生蜻蜓扑翼机构
- 一种仿生蜻蜓扑翼机器人