共轴反桨直升机
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及飞行器领域,具体是涉及一种共轴反桨直升机。
背景技术
现有的直升机相对多轴飞行器有诸多优点,比如具有更好的工作效率、更好的负载能力,更好的机动性能,而共轴直升机对比普通直升机负载能够有更小的旋翼直径、更短的机身重量、更轻的机身以及更好的悬停效果,非常适合用于系留无人机。
在共轴直升机作为系留无人机在开展工作时,由于系留无人机在工作过程中,需要长时间空中停留和多次改向,现有的共轴直升机通过控制上下两个旋翼组件中的电机的转速实现共轴直升机飞行状态的变化,该种方式可靠性低,并且对电机的性能要求较高,并且长期以往,对电机容易造成损坏,使电机的寿命缩短。
发明内容
本发明的主要目的是提供一种具有可驱动共轴直升机航向控制和锁定的变距组件的共轴反向直升机。
为了实现上述的主要目的,本发明提供的共轴反桨直升机包括机身、中心轴、上旋翼组件、下旋翼组件和变距组件,中心轴设置在机身上,上旋翼组件和下旋翼组件分别与中心轴连接,上旋翼组件和下旋翼组件位于机身的同一侧,上旋翼组件包括上桨夹和上旋翼驱动组件,上旋翼驱动组件驱动上桨夹转动,下旋翼组件包括下桨夹和下旋翼驱动组件,下旋翼驱动组件下桨夹转动;变距组件包括变距驱动组件、第一拉杆和连接杆,第一拉杆与连接杆连接,连接杆铰接于桨夹,变距驱动组件驱动第一拉杆移动,连接杆驱动上桨夹或下桨夹转动。
由上述方案可见,上桨夹和下桨夹分别用于连接桨叶,上旋翼驱动组件驱动上桨夹的桨叶转动,下旋翼驱动组件驱动下桨夹的桨叶转动,上桨夹的转动和下桨夹的转动为反向,通过上下桨叶的反向转动,消除反扭力,上旋翼组件和下旋翼组件分别与中心轴连接,并且上旋翼组件和下旋翼组件位于机身的同一侧,使该结构中的轴结构简单,机械强度高,上下桨叶旋转同心精度高,并且允许所使用的中心轴短,大大降低整个直升机机身的高度和旋翼头轴体的重量,控制结构更简单,精度更高;变距组件中的第一驱动装置驱动第一拉杆移动,带动连接杆移动,从而带动桨夹转动,从而改变上旋翼组件的螺距,通过上下旋翼组件之间的螺距差异产生的不同反扭力来进行直升机的航向操纵与锁定,在该过程中,无需过于改变驱动桨叶偏转的电机的转速,减少对电机的损伤,并且变距组件的结构简洁,可减少控制虚位,飞行控制更精准。
进一步的方案是,第一拉杆与中心轴平行设置,第一拉杆沿中心轴的轴向方向移动。
可见,第一拉杆与中心轴平行设置,使得第一拉杆与中心轴之间的距离更靠近地设置,使得直升机上结构更加紧凑、简约。
进一步的方案是,中心轴内设置有中空部,第一拉杆位于中空部内,第一拉杆的一端贯穿中心轴远离机身的一端,第一拉杆驱动上桨夹绕中心轴的径向转动。
可见,第一拉杆设置在中心轴内部,使得直升机的外部结构更加简单,并且中心轴内的中空部对第一拉杆的移动进行导向。
进一步的方案是,变距组件包括连接块,连接块和连接杆分别设置在中心轴的外部,连接块分别与第一拉杆贯穿所述中心轴的一端、连接杆固定连接,连接块设置在上桨夹的上方,连接杆连接在连接块与上桨夹之间。
可见,连接块与连接杆分别设置在机身的顶部且设置在中心轴的外侧,当拉杆移动时,带动连接块移动,从而带动连接杆驱动桨夹转动。
进一步的方案是,中心轴内设置有直线轴承,第一拉杆贯穿直线轴承。
可见,直线轴承的设置进一步地实现对第一拉杆的移动进行导向。
进一步的方案是,中心轴的外壁上设置有滑槽,变距驱动组件包括第一驱动装置和滑块,滑块与第一拉杆连接,滑块贯穿滑槽,第一驱动装置驱动滑块在滑槽内沿中心轴的轴向滑动。
可见,由于第一拉杆设置在中心轴的内部,而变距驱动组件设置在中心轴外,通过贯穿中心轴外壁的滑块驱动内部的第一拉杆移动,滑槽沿中心轴轴向的长度可控制可变距的范围。
进一步的方案是,上旋翼驱动组件包括上连动组件和多个第二驱动装置,下旋翼驱动组件包括下连动组件,上连动组件与下连动组件通过连接件连接,第二驱动装置驱动连接件移动,第二驱动装置位于上连动组件和下连动组件之间。
可见,第二驱动装置同时驱动上下桨叶偏转,使上下旋翼组件的同步性。
进一步的方案是,上连动组件包括多个轴套、十字盘、三个第一连动组件和第二连动组件,多个轴套套设在中心轴外,十字盘设置在第一连动组件与第二连动组件之间;第一连动组件和第二连动组件分别设置在轴套上,三个第二驱动装置和三个第一连动组件沿中心轴的周向排列,三个第二驱动装置一一对应地驱动三个第一连动组件移动。
可见,三个第一连动组件和三个第二驱动装置沿中心轴的周向排列,使得第一连动组件带动十字盘整体更好地发生倾斜,从而通过第二连动组件驱动桨夹倾斜。
进一步的方案是,十字盘包括内圈、外圈和轴承,轴承连接在内圈与外圈之间,内圈或外圈其一与第一连动组件连接,另一与第二连动组件连接;第一连动组件包括第二拉杆,第二拉杆的两端分别对应地与十字盘、第二驱动装置连接,第二驱动装置驱动第二拉杆移动。
可见,当第二拉杆驱动内圈倾斜时,带动外圈的倾斜,由于内圈与外圈之间连接有轴承,也使内圈的转动与外圈的转动相独立,从而使得十字盘原来应有的相位器与拉杆整合,使得旋翼驱动组件的结构更加简单,控制更加精准。
进一步的方案是,第二连动组件包括第三拉杆、铰接块和第四拉杆,第三拉杆分别与十字盘、铰接块连接,铰接块铰接于轴套,第四拉杆与铰接块铰接连接,第四拉杆推动上桨夹转动。
可见,十字盘外圈的倾斜带动第三拉杆的移动,使得铰接块转动,带动第四拉杆的移动,从而实现桨夹的转动,带动桨叶的偏移。
附图说明
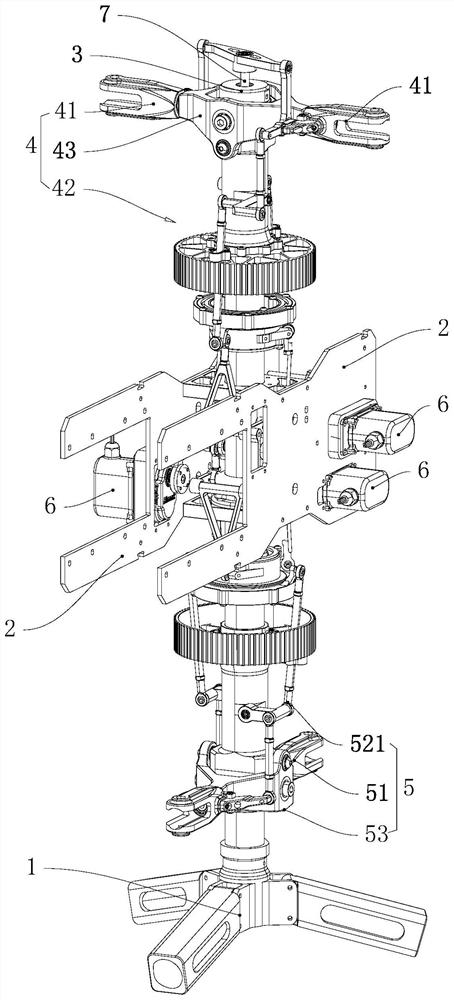
图1是本发明共轴反桨直升机实施例的结构图。
图2是本发明共轴反桨直升机实施例中去除固定架后的结构图。
图3是本发明共轴反桨直升机实施例中上旋翼组件和下旋翼组件连接的结构图。
图4是本发明共轴反桨直升机实施例的剖视图。
图5是本发明共轴反桨直升机实施例中变距组件的结构图。
以下结合附图及实施例对本发明作进一步说明。
具体实施方式
本发明的共轴反桨直升机通过变距组件来改变上旋翼组件的螺距,变距组件通过可移动的拉杆带动其一旋翼组件中的桨夹转动,从而实现上下旋翼组件之间的不同的反扭力,进而来进行航向的操纵与锁定。
参见图1和图2,共轴反桨直升机包括机身1、固定架2、中心轴3、上旋翼组件4、下旋翼组件5和变距组件7,固定架2和中心轴3分别设置在机身1上,中心轴3可固定设置在机身1上。上旋翼组件4用于固定上桨叶,下旋翼组件5用于固定下桨叶,上旋翼组件4和下旋翼组件5分别与中心轴3连接,使得上下桨叶旋转同心精度高,并且允许所使用的中心轴3短,大大降低整个直升机机身1的高度和旋翼头轴体的重量,控制结构更简单,精度更高。在本实施例中,可通过电机与同步带的连接结构驱动上旋翼组件4和下旋翼组件5绕中心轴3的轴向同步转动。上旋翼组件4和下旋翼组件5位于机身1的同一侧,使得上旋翼组件4和下旋翼组件5之间的距离更近,便于使用同一驱动装置同时驱动上旋翼组件4和下旋翼组件5工作,实现上下桨叶自身同时发生偏转,实现直升机飞行状态的变化。
在本实施例中,上旋翼组件4包括两个上桨夹41和上旋翼驱动组件42,上桨夹41用于固定上桨叶。下旋翼组件5包括两个下桨夹51和下旋翼驱动组件52,下桨夹51用于固定下桨叶。两个上桨夹41通过第一固定座43与中心轴3连接,两个下桨夹51通过第二固定座53与中心轴3连接,第一固定座43和第二固定座53分别套设在中心轴3外,第一固定座43和第二固定座53与中心轴3之间分别设置有轴承,从而实现上桨夹41与下桨夹51绕中心轴3的轴向转动,与此同时,上旋翼驱动组件42驱动上桨夹41可相对第一固定座43转动,下旋翼驱动组件52驱动下桨夹51可相对第二固定座53转动。
参见图3,上旋翼驱动组件42包括上连动组件44和三个第二驱动装置6,上连动组件44包括三个轴套45、十字盘46、三个第一连动组件47和第二连动组件48,三个轴套45套设在中心轴3外,在本实施例中,三个轴套45根据不同形状分为第一轴套451、第二轴套452和第三轴套453,第一轴套451和第二轴套452连接,十字盘46设置在第二轴套452与第三轴套453之间,第一轴套451和第二轴套452分别用于安装第二连动组件48,第三轴套453用于安装第一连动组件47。三个第二驱动装置6分别安装在固定架2上。
十字盘46设置在第一连动组件47与第二连动组件48之间。十字盘46包括内圈461、外圈462和轴承463,轴承463连接在内圈461与外圈462之间,内圈461或外圈462其一与第一连动组件47连接,另一与第二连动组件48连接。在本实施例中,内圈461与第一连动组件47连接,外圈462与第二连动组件48连接。
第一连动组件47包括第二拉杆471和连接件472,在本实施例中,第二驱动装置6为舵机,连接件472分别与第二驱动装置6和第二拉杆471铰接,第二拉杆471与十字盘46的内圈461连接,第二驱动装置6的驱动端转动,带动连接件472的移动,从而实现第二拉杆471的移动带动十字盘46倾斜。在本实施例中,三个第一连动组件47其中两组第一连动组件47结构相同,相同结构的两个第一连动组件47中的第二拉杆471贯穿第三轴套453后与十字盘46连接;另一第一连动组件47中的第二拉杆471呈三角形,该第二拉杆471在第三轴套453外与十字盘46连接。
在本实施例中,三个第二驱动装置6和三个第一连动组件47沿中心轴3的周向排列,三个第二驱动装置6一一对应地驱动三个第一连动组件47移动。
在本实施例中,上连动组件44包括两组第二连动组件48,第二连动组件48包括第三拉杆481、铰接块482和第四拉杆483,第三拉杆481分别与外圈462、铰接块482连接,第三拉杆481贯穿第二轴套452;铰接块482铰接于第一轴套451,第四拉杆483与铰接块482铰接连接,第四拉杆483推动上桨夹41转动。
下旋翼驱动组件52包括下连动组件521和连接件522,上连动组件44与下连动组件521通过连接件522连接,上连动组件44的结构与下连动组件521的结构相同。第二驱动装置6驱动连接件522移动,第二驱动装置6位于上连动组件44和下连动组件521之间。第二驱动装置6同时驱动上下桨叶偏转,使上下旋翼组件5的同步性。在本实施例中,固定架2和多个第二驱动装置6设置在上旋翼组件4和下旋翼组件5之间,第二驱动装置6同时驱动上桨叶和下桨叶同步转动,该结构使得机身1高度大大减小。
参见图4和图5,变距组件7包括变距驱动组件71、第一拉杆72、两个连接杆73和连接块74,在本实施例中,中心轴3内设置有中空部31,第一拉杆72位于中空部31内,第一拉杆72的轴向与中心轴3的轴向平行设置。第一拉杆72的轴向第一端贯穿中心轴3远离机身1的一端,第一拉杆72的轴向第二端连接变距驱动组件71。连接块74与第一拉杆72的轴向第一端固定连接,而连接块74分别与两个连接杆73连接,使得连接块74与连接杆73位于中心轴3的顶部且位于中心轴3的外侧上。在本实施例中,连接块74上设置有一个中部连接位741和两个端部连接位742,中部连接位741位于两个端部连接位742之间,两个端部连接位742分别一一对应地位于连接块74的两端上,第一拉杆72的轴向第一端与连接块74的中部连接位741连接,两个连接杆73分别一一对应地与连接块74的两个端部连接位742连接。连接杆73的长度延伸方向与第一拉杆72的轴向平行。
第一拉杆72通过与连接杆73连接,连接杆73铰接于桨夹,变距驱动组件71驱动第一拉杆72移动,连接杆73驱动上桨夹41或下桨夹51转动,从而实现上桨叶偏转。在本实施例中,变距组件7用于调整上旋翼组件4的螺距,两个连接杆73一一对应地驱动上旋翼组件4中的两个上桨夹41转动。
中心轴3的外壁上设置有两个平行设置的滑槽32。变距驱动组件71包括第一驱动装置711和滑块712,第一驱动装置711通过连接件713与滑块712铰接,滑块712同时贯穿第一拉杆72的轴向第二端和两个滑槽32,第一驱动装置711驱动滑块712在滑槽32内沿中心轴3的轴向滑动。
当第一驱动装置711驱动滑块712在滑槽32内移动,带动第一拉杆72的移动,从而通过连接杆73带动上桨夹41转动。中心轴3内设置有直线轴承,第一拉杆72贯穿直线轴承第一拉杆72沿中心轴3的轴向方向移动。第一拉杆72驱动上桨夹41绕中心轴3的径向转动。第一驱动装置711为舵机,第一驱动装置711同时与滑块712沿中心轴的径向的两端连接。
上桨夹41和下桨夹51分别用于连接桨叶,上旋翼驱动组件42驱动上桨夹41的桨叶转动,下旋翼驱动组件52驱动下桨夹51的桨叶转动,上桨夹41的转动和下桨夹51的转动为反向,通过上下桨叶的反向转动,消除反扭力,上旋翼组件4和下旋翼组件5分别与中心轴3连接,使得上下桨叶旋转同心精度高,并且上旋翼组件4和下旋翼组件5位于机身1的同一侧,使该结构中的轴结构简单,机械强度高。变距组件7中的第一驱动装置驱动第一拉杆72移动,带动连接杆73移动,从而带动桨夹转动,从而改变上旋翼组件4的螺距,通过上下旋翼组件的螺距差产生不同反扭力来进行直升机的航向操纵与锁定,在该过程中,无需过于改变驱动驱动桨叶偏转的电机的转速,减少对电机的损伤,并且变距组件的结构简洁,可减少控制虚位,控制更精准。
最后需要强调的是,以上所述仅为本发明的优选实施例,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种变化和更改,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种共轴反桨直升机传动系统
- 共轴反桨直升机