一种旋翼无人机被动收桨收轴结构
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及无人机领域,具体涉及一种旋翼无人机被动收桨收轴结构。
背景技术
无人机收桨收轴的控制有两种:第一种为手动来完成旋翼无人机的螺旋桨和轴的收起功能,第二种为旋翼无人机在折叠轴上加伺服电机来控制轴的折叠和张开,螺旋桨通过电子调调速器加控制来完成螺旋桨不同角度的停止收起功能;第一种手动控制只要结构有旋转轴和到位固定座通过人即可完成折叠和张开的功能,第二种通过在每个臂上加伺服电机和电子调速器可控限位功能,通过主控板就可以来控制每个轴折叠和张开功能,通过电子调速器来控制螺旋桨的停止位置角度;目前,市面上大部分为手动操作来完成旋翼无人机螺旋桨或者轴的收起折叠和张开功能,亟需一种通过电机来控制无人机螺旋桨和轴的结构。
发明内容
针对现有技术中提到的问题,本发明提供一种旋翼无人机被动收桨收轴结构。
本发明一种旋翼无人机被动收桨收轴结构,包括固定环与固定架,固定环与固定架之间通过伸缩装置相连,所述固定环沿环形面上均匀安装有多个固定块,固定块上设有旋转关节,旋转关节一端与固定块相连,另一端与电机导向座相连,所述旋翼无人机螺旋桨的底部设有电机导向架,其电机导向架与电机导向座匹配相连。
优选地,所述电机导向座的表面设有不同角度的螺旋曲面结构包括0°导向座、83°导向座及145°导向座,不同角度的电机导向座依次以固定环为中心环形排列设置。
优选地,所述电机导向架包括导向架与万向滚珠,所述导向架设于螺旋桨两端,导向架底部安装有万向滚珠,万向滚珠大小与螺旋曲面结构相适应。
优选地,所述旋转关节包括旋转轴、第一轴承、上套、第三压缩弹簧、第二轴承、轴承套柱、轴承压板、摆臂、轨迹筒,所述旋转轴穿过轨迹筒与摆臂相连,旋转轴顶部设有上套,上套与旋转轴之间设有第一轴承,其中第一轴承与上套之间通过轴承压板相连,旋转轴中部设有一轴承套柱,所述轴承套柱穿入旋转轴内设置,轴承套柱上还设有第二轴承,旋转轴上套与轴承套柱之间还套设有第三压缩弹簧,所述轨迹筒设置于摆臂上。
优选地,所述摆臂包括摆轴上架与摆杆,所述摆轴上架与摆杆之间所形成的夹角为90°。
优选地,所述摆杆包括摆臂直杆与摆臂弯杆,所述摆臂直杆与摆臂弯杆依次间隔设置。
优选地,所述伸缩装置包括第二外法兰直线轴承、第一外法兰直线轴承、第二外钢珠衬套、第一外钢珠衬套、第一压缩弹簧、第二压缩弹簧、第一伸缩杆、第二伸缩杆及第三伸缩杆,所述第三伸缩杆表面上套设有第二伸缩杆,第二伸缩杆表面上套设有第一伸缩杆,所述第二伸缩杆顶部设有第一外法兰直线轴承,第二伸缩杆内由上至下依次设有第一外钢珠衬套与第一压缩弹簧,所述第三伸缩杆顶部设有第二外法兰直线轴承,第三伸缩杆内由上至下依次设有第二外钢珠衬套与第二压缩弹簧。
优选地,所述伸缩装置设有多个。
本发明相对于现有技术,取得了以下的技术效果:
通过本发明可减少控制繁多复杂且减轻无人机重量,在不需要人力工作下可以自动收起进入地面方舱中,出舱可以恢复原状的机构,采用机械的机构方式以实现安全可靠地静中或动中的运动工作环境。
附图说明
图1为本发明结构收起示意图;
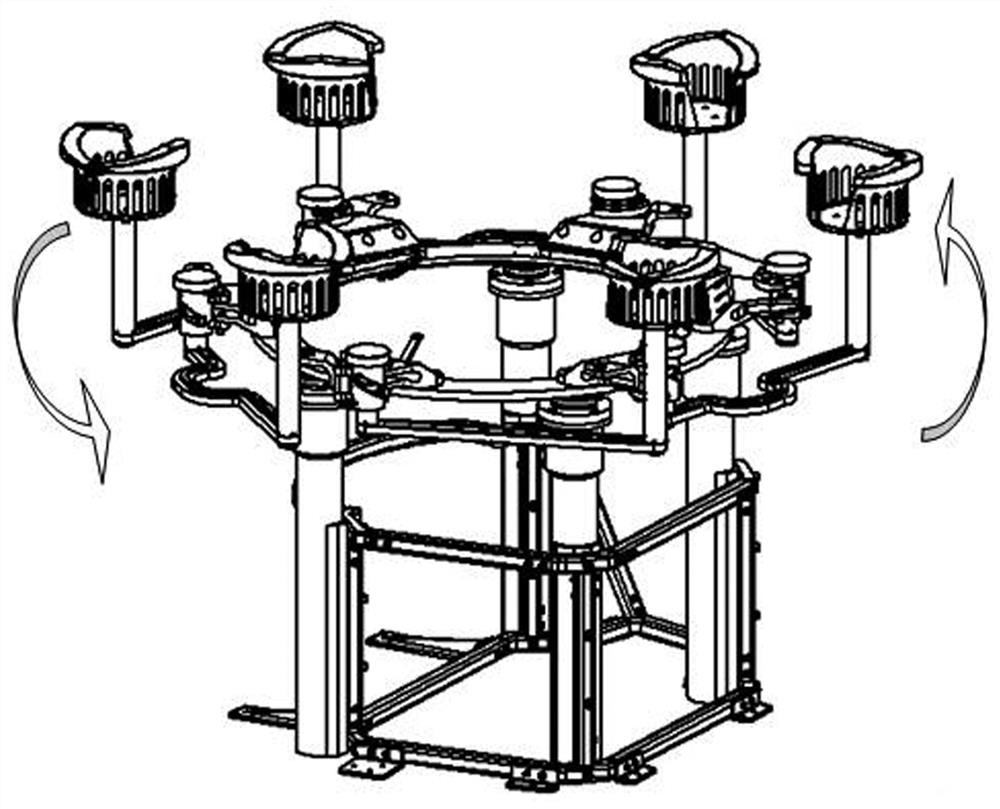
图2为本发明结构张开示意图;
图3为本发明电机导向架结构示意图;
图4为本发明螺旋桨收起示意图;
图5为本发明旋转轴结构示意图;
图6为本发明旋转关节结构示意图;
图7为本发明螺旋桨轴收起示意图;
图8为本发明螺旋桨轴收起另一角度示意图;
图9为本发明伸缩装置示意图。
附图标记:1-固定环;2-旋转关节;3-固定块;4-摆臂直杆;5-摆臂弯杆;6-电机导向架;7-83°导向座;8-145°导向座;9-0°导向座;10-伸缩装置;11-固定架;12-导向架;13-万向滚珠;14-第一轴承;15-上套;16-第三压缩弹簧;17-第二轴承;18-轴承套柱;19-轴承压板;20-轨迹筒;21-旋转轴;22-摆杆;23-摆轴上架;24-电机导向座;25-第二外法兰直线轴承;26-第一外法兰直线轴承;27-第二外钢珠衬套;28-第一外钢珠衬套;29-第二压缩弹簧;30-第一压缩弹簧;31-第三伸缩杆;32-第二伸缩杆;33-第一伸缩杆。
具体实施方式
本发明一种旋翼无人机被动收桨收轴结构,如图所示,包括固定环1与固定架11,固定环1与固定架11之间通过伸缩装置10相连,所述固定环1沿环形面上均匀安装有多个固定块3,固定块3上设有旋转关节2,旋转关节2一端与固定块3相连,另一端与电机导向座24相连,所述旋翼无人机螺旋桨的底部设有电机导向架6,其电机导向架6与电机导向座24匹配相连。所述电机导向座24的表面设有不同角度的螺旋曲面结构包括0°导向座9、83°导向座7及145°导向座8,不同角度的电机导向座24依次以固定环1为中心环形排列设置。所述电机导向架6包括导向架12与万向滚珠13,所述导向架12设于螺旋桨两端,导向架12底部安装有万向滚珠13,万向滚珠13大小与螺旋曲面结构相适应。所述旋转关节2包括旋转轴21、第一轴承14、上套15、第三压缩弹簧16、第二轴承17、轴承套柱18、轴承压板19、摆臂、轨迹筒20,所述旋转轴21穿过轨迹筒20与摆臂相连,旋转轴21顶部设有上套15,上套15与旋转轴21之间设有第一轴承14,其中第一轴承14与上套15之间通过轴承压板19相连,旋转轴21中部设有一轴承套柱18,所述轴承套柱18穿入旋转轴21内设置,轴承套柱18上还设有第二轴承17,旋转轴21上套15与轴承套柱18之间还套设有第三压缩弹簧16,所述轨迹筒20设置于摆臂上。所述摆臂包括摆轴上架23与摆杆22,所述摆轴上架23与摆杆22之间所形成的夹角为90°。所述摆杆22包括摆臂直杆4与摆臂弯杆5,所述摆臂直杆4与摆臂弯杆5依次间隔设置。所述伸缩装置10包括第二外法兰直线轴承25、第一外法兰直线轴承26、第二外钢珠衬套27、第一外钢珠衬套28、第一压缩弹簧30、第二压缩弹簧29、第一伸缩杆33、第二伸缩杆32及第三伸缩杆31,所述第三伸缩杆31表面上套15设有第二伸缩杆32,第二伸缩杆32表面上套15设有第一伸缩杆33,所述第二伸缩杆32顶部设有第一外法兰直线轴承26,第二伸缩杆32内由上至下依次设有第一外钢珠衬套28与第一压缩弹簧30,所述第三伸缩杆31顶部设有第二外法兰直线轴承25,第三伸缩杆31内由上至下依次设有第二外钢珠衬套27与第二压缩弹簧29。所述伸缩装置10设有多个。
本发明如图1、图2、图3及图4所示,固定架11设置在装置底部,为整个装置提供支撑作用,固定架11上固定设有多个伸缩装置10,本实施例中伸缩装置10设有4个,伸缩装置10顶部相连有固定环1,本实施例固定环1上沿固定环1的环形端面均匀设有6个固定块3,每个固定块3上相连有旋转关节2,旋转关节2的另一端相连有电机导向座24;电机导向座24上设有螺旋桨叶,电机导向座24表面上设有不同角度的螺旋曲面结构,本实施例中有三种,分别为呈0°的螺旋曲面结构、呈83°的螺旋曲面结构及呈145°的螺旋曲面结构从而对应0°导向座9、83°导向座7及145°导向座8,本实施例中三种导向座均设有两个,相同两个导向座相对设置;
设置的螺旋曲面结构配合安装于螺旋桨底部的万向滚珠13,当万向滚珠13接触到电机导向座24上的曲面结构后就沿着螺旋曲面结构旋转下降到指定位置槽后停止,达到把螺旋桨收到固定角度位置的目的;本方案可通过设置在电机导向座24与固定块3之间的旋转关节2来带动相连的摆臂实现旋转,本实施例中的轨迹筒20是一个圆管状结构件且表面开设有与第二轴承17相适应的走道,通过第二轴承17沿走道旋转滑动可将螺旋桨与螺旋桨轴到达需要收起的指定位置,达到带及轴收起目的;本实施例固定环1与固定架11之间的伸缩装置10为伸缩杆,伸缩杆为相连地第三伸缩杆31,第二伸缩杆32及第一伸缩杆33,第三伸缩杆31直径小于第二伸缩杆32,第二伸缩杆32直径小于第一伸缩杆33,设置的多节伸缩杆配合设置的压缩弹簧、法兰直线轴承及钢珠衬套的结构,当第一伸缩杆33受到来自固定环1的压力时,会随着力的方向向下移动,反之没有受到压力时会向上托起顶部固定环1上起着支撑作用。
本发明在使用时,无人机在下落时,当需要将螺旋桨收到一定角度时,可选择0°导向座9、83°导向座7或145°导向座8,螺旋桨底部的万向滚珠13沿固定的螺旋曲面旋转下降到指定位置槽后停止,达到把螺旋桨收到固定角度位置,同时接触到旋转关节2时,通过旋转轴21沿轨迹筒20的走道旋转下降,带动摆臂收起,实现螺旋桨轴收起,当无人机接触固定环1时,固定环1受到压力,第三伸缩杆31在第二伸缩杆32中下降,第二伸缩杆32在第一伸缩杆33中下降起到伸缩效果。
- 一种旋翼无人机被动收桨收轴结构
- 一种旋翼无人机被动收桨收轴结构