使用机架的无人机
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及一种无人机,尤其涉及一种使用机架的无人机。
背景技术
无人机通常包括机身及从机身向外伸展的多个机臂,机臂远离机身的末端上设置一个或多个旋翼叶片,该旋翼叶片的旋转可带动所述无人机飞行。但是,向外伸展的机臂及其上的旋翼叶片增加了无人机的体积,不利于便携。为提升便携性,一种可折叠机臂及其旋翼叶片的可折叠无人机应运而生。
现有的用于可折叠无人机的装置或方法通常需要手动去折叠或展开机臂,展开或折叠效率低,且用户体验感觉不好。此外,目前无人机大多采用锁扣结构来固定折叠的及/或展开的机臂及/或旋翼叶片。所述锁扣结构是手动的(例,要求一个用户手动锁扣所述机臂及/或旋翼叶片),从而增加折叠/展开所述机臂及/或旋翼叶片的时间及复杂性。此外,所述锁扣装置可包括多个活动部件,该多个活动部件在多次使用后易产生稳定性问题。而且,所述锁扣结构可增加无人机的重量。
发明内容
有鉴于此,有必要提供一种能提升用户体验度的无人机。
一种无人机,包括机身、自机身向外延伸的至少一机臂,机臂与机身相连的一端为机臂的近端部,与近端部相背离的另一末端为机臂的远端部;以及动力单元,设置在机臂的远端部,动力单元包括马达及被马达驱动而旋转的旋翼,旋翼的转动带动无人机的移动。
机臂旋转至展开位置时,机臂处于展开状态;在展开状态下,机臂自机身向外伸展,机臂上的动力单元可以带动无人机移动。
机臂可以相对机身在一展开位置与一折叠位置之间旋转,无人机包括设置在机臂与机身之间的弹性元件,弹性元件可以在机臂旋转超过一极限位置时使得机臂自动旋转至展开位置或折叠位置。
附图说明
图1是本发明实施方式提供的一种无人机的立体图。
图2是本发明实施方式的一种无人机折叠状态图。
图3是本发明另一实施方式的一种无人机折叠状态图。
图4是本发明一实施方式的机臂及机臂连接结构内的元件的分解视图。
图5是图4中的机臂与机臂连接结构装配后的截面图。
图6是本发明另一实施方式的机臂及机臂连接结构内的元件的分解视图。
图7是本发明又一实施方式的机臂及机臂连接结构在飞行状态下的装配结构图。
图8为图7的机臂及机臂连接结构在折叠状态下的装配图。
图9为本发明又一实施方式的机臂及机臂连接结构的示意图。
图10为本发明一实施方式的无人机的部分模块图。
图11为本发明另一实施方式的无人机的部分模块图。
主要元件符号说明
无人机 1
机架 100
机身 10
机臂 20,20a,20b,20c,21,22,23,24
机臂连接结构 30,31,32,33
动力单元 40
马达 400
旋翼叶片 402
机臂连接部 210,220,230
连接部底壁 212
第一中心通孔 2120
侧壁 214
轴套孔 216
轴套底壁 3100
第二中心通孔 3102
轴套 310
转轴 312,320,330,340
弹性元件 314,324,344
第二弹性元件 334
上离合部 316
第一突起 3160
第一凹陷 3162
下离合部 318
第二突起 3180
第二凹陷 3182
转轴安装孔 221
第一部分 222
第二部分 223
结合部 224
固定支架 322
转轴孔 3220
固定板 3222
凸轮 332
突起 2300
传感器 102
电池管理单元 104
电池 106
飞行控制器 108
功能元件 110
如下具体实施方式将结合上述附图进一步说明本发明。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
本发明提供一种无人机,所述无人机可用于任何适宜的环境,例如在空中(例如旋翼飞行器、固定翼飞行器或固定翼与旋翼混合的飞行器),在水中(例,船或潜艇),在地面上(例,摩托车,汽车,卡车,公交车,火车等),在太空中(例,航天飞机、卫星或探测器),或在地下(例如地铁),或上述环境的任意组合。在本实施例中,所述无人机为旋翼飞行器,其中所述旋翼可为单旋翼、双旋翼、三旋翼、四旋翼、六旋翼及八旋翼等。为便于描述,如下实施例中的无人机以四旋翼飞行器为例进行说明。
下面结合附图,对本发明的一些实施方式作详细说明。在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。
请参阅图1,无人机1包括机架100及动力单元40。所述动力单元40用于移动所述无人机1。所述机架100包括机身10及自所述机身10向外伸展的四个机臂20。每一机臂20通过一机臂连接结构30与所述机身10相连,通过该机臂连接结构30,每一机臂20可相对所述机身10活动而折叠或展开。每一机臂20与所述机身10相连的一端为该机臂20的近端部,与该近端部相背离的另一末端为该机臂20的远端部。在本实施例中,每一机臂20的远端部设有一动力单元40,所述动力单元40包括马达400及被所述马达驱动而旋转的旋翼402。旋翼402的转动带动所述无人机1的移动。所述移动可包括起飞、降落、盘旋、改变方向、速度、方位等。
请一并参阅图2及图3所示,所述机臂20可相对所述机身10折叠。在一些实施例中,所述机臂20可折叠至所述机身10的上面或下面。在一些实施例中,所述机臂20可折叠至所述机身10的侧面。在一些实施例中,部分机臂20可折叠至所述机身10的上面或下面,部分机臂可折叠至所述机身10的侧面。如图3所示,第一机臂20a及第三机臂20b折叠至所述机身10的上面,第二机臂20b及第四机臂20d分别折叠至所述机身10的两相对侧边。
如前所述,所述无人机1的机臂20可通过所述机臂连接结构30连接至所述机身10。在一些实施例中,所述机臂连接结构30可包括一个或多个弹性元件。所述弹性元件可当所述机臂20可逆地折叠至一预定角度时使得所述机臂20自动折叠至折叠状态;而且,当所述机臂20被可逆地展开至一预定状态时所述弹性元件可使得所述机臂20自动展开至展开状态(也可称为飞行状态)。在所述折叠状态下,所述机臂20折叠至所述机身10的上方、下方或侧边,以减小所述无人机1的体积,便于携带。在所述展开状态下,所述机臂20自所述机身10向外伸展,所述机臂20上的动力单元40可带动所述无人机移动。在一些实施例中,所述弹性元件还可当所述机臂20在飞行状态及/或折叠状态时锁固所述机臂20。当所述机臂20在飞行状态及/或折叠状态时,所述弹性元件还可用于吸收施加在所述机臂20上的振动力。所述振动力可能产生自外界的环境或动力单元(例,动力单元的旋翼叶片的旋转)的驱动力。
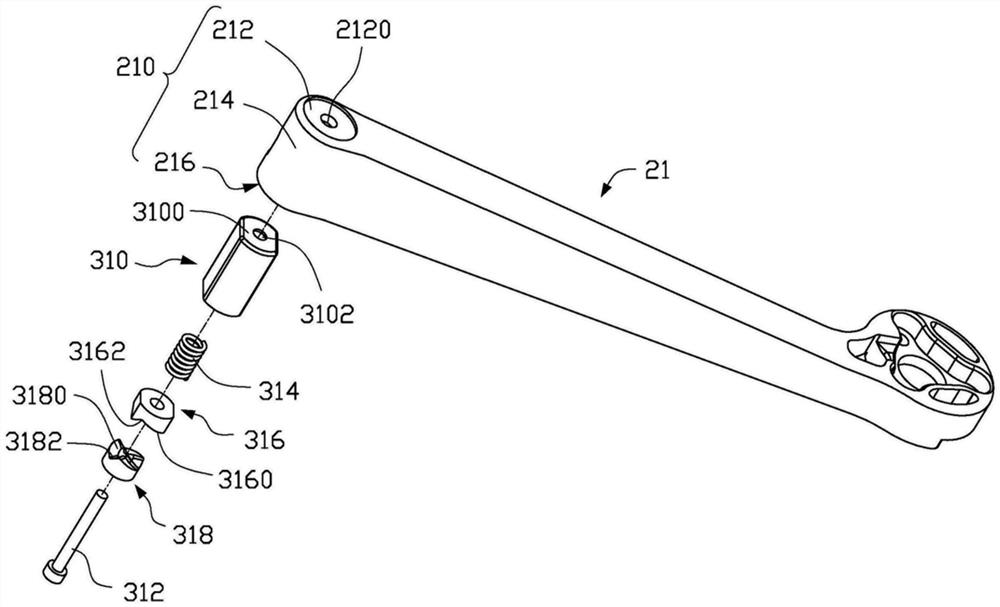
请参阅图4及图5所示,示出了本发明一较佳实施方式的一种机臂连接结构31的结构分解图。
机臂21通过所述机臂连接结构31连接至所述机身10。所述机臂连接结构31可使得所述机臂21相对所述机身10翻转及/或平移。如图4所示,所述机臂连接结构31可包括一轴套310,一转轴312,一弹性元件314,上离合部316及下离合部318。
所述机臂21的近端部(即与所述机身10相连接的一端)包括一连接部210,所述连接部210大致呈圆筒状,包括一底壁212、侧壁214及由底壁212与所述侧壁214(未标示)围设而成的轴套孔216,所述轴套310可收容在所述轴套孔216中并固定在所述轴套孔210中。在所述实施例中,所述轴套310与所述轴套孔216通过形状配合,当所述轴套310收容在所述轴套孔216中时,所述机臂21的转动能带动所述轴套310同轴转动。可以理解的是,在其他实施例中,所述轴套310与所述轴套孔216的配合方式还可以是其他任意适宜的配合方式,只要使得所述轴套310与所述轴套孔216之间不发生相对转动即可。例如所述配合方式可以卡扣配合,此种情况下,所述轴套310外侧壁与所述侧壁214的内侧壁两者之一者上设有卡扣,而另一者上设有卡槽或卡勾,所述卡槽或卡勾与所述卡勾配合而固定所述轴套孔310于所述轴套孔216内。
所述轴套310与所述连接部210结构类似,为具有底壁3100的中空柱体。所述弹性元件314及所述上离合部316可收纳在所述轴套310内。所述连接部210的底壁212上设有第一中心通孔2120,所述轴套310的底壁3100设有第二中心通孔3102,所述转轴312可穿过所述第一中心通孔2120与所述第二中心通孔3102而固定所述轴套310于所述轴套孔216内。所述机臂21及所述轴套310可绕所述转轴312转动。
所述弹性元件314可套设在所述转轴312上并容纳在所述轴套孔216内。所述弹性元件314的内径大于所述转轴312外径,其外径大于所述轴套310上的第二中心通孔3102的孔径。所述弹性元件314可固定设置在所述轴套310的底壁3100上。
所述弹性元件314可为金属弹簧或塑料弹簧。可选地,所述弹性元件314可为一弹性纤维。所述弹性元件314可采用具有弹性系数约1磅/平方英寸(Pound per square inch,PSi)至2000PSi的弹性材料制成.在一些实施例中,所述弹性元件314可采用具有弹性系数约0.001帕斯卡(Pascal,Pa)至1千兆帕斯卡(Gigapascal,GPa)的弹性材料制成。在一些实施例中,所述弹性元件314可采用具有弹性系数约1Gpa至10Gpa的弹性材料制成。在一些实施例中,所述弹性元件314可采用具有弹性系数约10pa至50Gpa的弹性材料制成。所述弹性元件314可采用具有弹性系数约50Gpa至100Gpa的弹性材料制成。所述弹性元件314可采用具有弹性系数约1Gpa至10Gpa的弹性材料制成。所述弹性元件314可采用具有弹性系数不超过1000Gpa的弹性材料制成。
所述上离合部316可套设在所述转轴312上,其一端抵持于所述弹性元件314与所述底壁3100相背的一端并收纳在所述轴套孔216内,其另一端与所述下离合部318啮合。所述上离合部316能够随着所述轴套310同步旋转。同所述轴套310与所述轴套孔216的配合方式相类似,所述上离合部316与所述轴套310的配合方式可以是任意适宜的配合方式,只要使得所述上离合部316与所述轴套310同步旋转即可,例如形状配合或卡扣配合等。在一些实施例中,所述上离合部316还可轴向地在所述轴套310内滑动。
所述下离合部318可固定连接至所述机身10。所述下离合部318与所述上离合部316相配合的一侧具有凸轮结构,所述凸轮结构包括第一突起3180及第一凹陷3182。所述上离合部316与所述下离合部318配合的一侧具有相对应的结构,也包括第二突起3160及第二凹陷3162。其中,所述第二突起3160的形状与所述第一凹陷3182的形状相适应,刚好能容纳在所述第一凹陷3182中;所述第一突起3180的形状与所述第二凹陷3162的形状相适应,刚好能容纳在所述第二凹陷3162中,从而使得所述上离合部316在未受外力作用时刚好与所述下离合部318相啮合。
当将所述机臂21折叠至折叠状态或展开至展开状态时,施加外力在所述机臂21上使得所述机臂21受外力旋转,所述轴套310及所述上离合部316可被所述机臂21带动而同步旋转,而所述下离合部318固定在所述机身10上,故所述上离合部316在所述机臂21及所述轴套310的转动力的驱动下,相对所述下离合部318旋转,所述第二突起3160从所述第一凹陷3182中脱离出来慢慢滑动至所述第一突起3180,从而使得所述上离合部316沿着轴向在所述轴套310内滑动,压缩所述弹性元件314。所述弹性元件314的压缩可增加其弹性能量,从而增加对所述机臂21旋转的驱动力。当所述上离合部316的第二突起3160旋转至所述第一突起3180的最高点时,所述弹性元件314被压缩到一极限位置。所述上离合部316继续相对所述下离合部318旋转时,所述第二突起3160从所述第一突起3180的最高点向所述第一凹陷3182处滑动,所述弹性元件314的弹性力得到释放,此时,撤掉施加在所述机臂21上的外力,所述机臂21也可在所述弹性元件314的弹性力作用下自动展开或折叠。当所述第一突起3180收容在所述第一凹陷3182中时,所述弹性元件314的弹性力得到完全释放,若不继续施加外力旋转所述机臂21,所述上离合部316将不会相对所述下离合部318旋转,从而实现对所述机臂21的限位,也即,此时所述机臂21被锁持在所述展开/折叠状态。
可以理解,所述轴套310可以省略,所述弹性元件314、所述上离合部316及所述下离合部318依次套设在所述转轴312上并直接容设在所述连接部210的轴套孔216中。
可以理解,所述上离合部316和所述下离合部318之间的配合面包括的突起数量可不限于图中所示,例如可以为1个、2个及2个以上。
图6示出了本发明另一较佳实施方式的一种机臂连接结构32的结构分解图。所述机臂连接结构32包括设置在机臂22近端部的连接部220,转轴320,固定支架322及弹性元件324。所述转轴320连接所述连接部220及所述固定支架322。在所述实施例中,所述连接部220设有转轴安装孔221,用于安装固定所述转轴320于所述转轴安装孔221内。所述固定支架322上设有转轴孔3220,所述转轴320远离所述连接部220的一端穿设在所述转轴孔3220中。可以理解的是,在其他实施例中,所述转轴320的一端可固设在所述连接部220及所述固定支架322中的其中一者上,而另一端可转动地固定在所述连接部220及所述固定支架322中的中的另一者上。
所述连接部220包括相互连接的一第一部分222及一第二部分223。所述第一部分222和第二部分223之间具有一角度。优选地,所述角度为锐角,例如30度、45度、60度等。所述第一部分222与第二部分223之间具有结合部224,所述结合部224可为凸轮结构,所述凸轮结构外表面可为圆滑的弧面。所述第一部分222和第二部分223与所述弹性元件324接触的表面大致为平面。所述弹性元件324为弹片,当所述第一部分222或所述第二部分223与所述弹性元件324接触时,所述第一部分222或所述第二部分223的接触面与所述弹性元件324大致平行。
所述固定支架322一端设置有所述转轴孔3220,另一端垂直向远离所述固定支架322的方向延伸有固定板3222,所述固定板3222远离所述固定支架322的一端固定所述弹性元件324。所述弹性元件324可以是,例如,可提供弹性力以旋转所述机臂22的弹片。所述机臂22可相对所述固定支架322转动,从而使得在所述机臂22位于第一位置时,所述第一部分222与所述弹性元件324接触;在所述机臂22位于第二位置时,所述第二部分223与所述弹性元件324接触。所述第一和第二位置可分别对应于所述机臂22的两个极端位置(例如,当所述机臂位于折叠状态及飞行状态)。所述第一和第二位置可决定所述机臂22旋转的角度。所述旋转的角度取决于所述第一部分222和第二部分223之间的角度及机身相对所述固定支架322(及弹性元件324)的位置。
当所述机臂22到达第一或第二位置时,所述弹性元件324可弹性变形。所述弹性形变提供弹性力以锁固所述机臂22至所述第一或第二位置。在一实施例中,当折叠所述机臂22至折叠状态时,所述机臂22可相对一第一方向旋转,从而使得所述机臂22的近端部与所述弹性元件324之间的连接从第一部分222转换到第二部分223。
相反地,当展开所述机臂至22飞行状态时,所述机臂22可绕与第一方向相反的第二方向旋转,从而使得所述机臂22近端部的连接部220和所述弹性元件324之间的接触从第二部分223至所述第一部分222。所述弹性元件324可提供对抗第一部分222与第二部分223的弹性力。所述弹性力的力度取决于所述弹性元件324的形变程度。所述弹性元件324的弹性形变取决于所述弹性元件324的弹性系数及所述第一部分222和第二部分223之间的角度、结合部224的形状/轮廓。所述结合部224外表面为圆弧面,可使得所述弹性元件324和所述连接部220之间的接触在第一部分222和第二部分223之间切换时更顺滑。
请参阅图7和图8所示,示出了本发明又一较佳实施方式的一种机臂连接结构33的结构分解图。所述机臂连接结构33包括转轴330、凸轮332及第二弹性元件334。机臂23通过所述转轴330可转动地固定在所述机身10的一端。所述机臂23的近端部设有连接部230,所述转轴330穿设固定在所述连接部230上。
所述凸轮332固定设置在所述机身上靠近所述连接部230的部位,所述凸轮332的外表面与所述连接部230的外表面相抵持。所述连接部230具有一突起2300。所述第二弹性元件334设置在所述凸轮332的一端。所述连接部230与所述凸轮332相抵持的一侧为具有弹性系数的弹性材料制成。当所述突起2300抵持在所述凸轮332最高点时,所述连接部230被压缩。
如图7所示,当所述机臂23处于展开状态(或飞行状态)时,所述凸轮332对所述连接部230的抵持力使得所述机臂23锁固在所述展开状态。当施加外力将所述机臂23向折叠状态折叠时,所述机臂23绕所述转轴330朝一第一方向旋转,所述连接部230与所述凸轮332之间的抵持力加大,所述连接部230被压缩,当到达一极限位置时,所述连接部230与所述凸轮332之间的抵持力达到最大,所述连接部230储存的弹性能力达到最大,此时,继续转动所述机臂23,所述连接部230滑离该极限位置,所述连接部230储存的弹性回复力得到释放,所述弹性回复力可使得所述机臂23自动折叠至所述折叠状态。在其他实施方式中,也可以是转轴330具有弹性形变能力,只要使得所述连接部230在受到外部压力时能够固发生弹性形变即可。
如图8所示,当所述机臂23处于折叠状态时,所述连接部230的突起2300抵持在所述第二弹性元件334上,所述第二弹性元件334产生一弹性力作用在所述连接部230上,使得所述机臂23的远端部及其上的旋翼叶片402抵持在所述机身10上,从而锁固所述机臂23于所述折叠状态。当施加外力将所述机臂23向展开状态旋转时,所述机臂23绕转轴330朝与所述第一方向相反的第二方向旋转,所述连接部230的突起2300从所述第二弹性元件334向所述凸轮332的最高点滑动,当到达一极限位置时,所述突起2300到达所述凸轮332的最高点,所述连接部230或所述转轴330发生最大弹性形变,此时,继续施加外力旋转所述机臂23,所述突起2300滑离所述凸轮332的最高点,此时撤销施加的外力,所述弹性形变回复力可使得所述机臂23自动展开至所述飞行状态。
可以理解,所述第二弹性元件334是为了使得所述机臂23更稳固地锁固在折叠状态,在其他实施方式中,所述第二弹性元件334可以省略,所述凸轮332对所述连接部230的抵持力也可锁固所述机臂23于所述折叠状态。
在其他进一步的实施例中,在所述折叠状态下,所述旋翼叶片402可被驱动旋转,从而抵持在所述机身10上的作用力增大,所述机身10对所述旋翼叶片402的反作用力使得所述机臂23朝第二方向旋转,当旋转到一预定位置时,所述连接部作用在所述第二弹性元件334上的压力使得所述第二弹性元件334产生弹性形变,所述弹性形变力产生反作用力作用于所述连接部230,使得所述连接部230继续朝所述第二方向旋转,使得所述连接部230的突起逐步滑动到所述凸轮332的最高点后,所述连接部230的弹性形变力使得所述机臂23自动展开到所述飞行状态。其中所述旋翼叶片402的驱动可基于用户的输入,例如远程控制命令等。如何,可实现机臂23的自动展开而不需要人力介入。
如上图4-图5、图6及图7-图8所示的实施例中分别示出了不同的机臂连接结构,但是本发明的机臂连接结构并不限于如上所述的这几种实施例。可以理解的是,在其他实施例中,所述机臂连接结构可包括转动连接所述机臂至所述机身的转轴(例如,图4-图5中的转轴312、图6中的转轴320、图7-图8中的转轴330),一设置在所述机身10与所述机臂20之间的弹性元件(例如,图4-图5中的弹性元件314、图6中的弹性元件324、图7-图8中的连接部或转轴),一与所述机臂20固定连接的第一配合结构(例如,图4-图5中的上离合部、图6中的连接部220、图7-图8中的连接部230),及与所述机身10固定连接的第二配合结构(例如,图4-图5中的下离合部318、图6中的弹性元件324、图7-图8中的凸轮332),只要所述第一配合结构与所述第二配合结构中的至少一者上设置有凸轮结构(例如,图4-图5中示出的上离合部与下离合部的第一突起2160与第二突起3180、图6中的结合部224、图7-图8中的凸轮332及突起2300),且当所述机臂20在所述折叠状态或所述飞行状态时,所述第一配合结构与所述第二配合结构之间的配合点不在所述凸轮结构的最高点,当所述机臂在所述折叠状态与所述飞行状态之间转换时,所述第一配合结构与所述第二配合结构之间的配合点可随着所述机臂的旋转到达所述凸轮结构的最高点,此时,所述弹性元件被压缩到最大限度,在所述第一配合结构与所述第二配合结构之间的配合点滑离所述凸轮结构的最高点时,所述弹性元件的弹性回复力可使得所述机臂自动展开至展开状态或自动折叠至折叠状态。因此,只要机臂连接结构能使得所述第一配合结构与所述第二配合结构之间的配合点在所述凸轮结构的最高点时,弹性元件被压缩,在离开所述最高点时,弹性回复力能使得所述机臂自动展开或折叠即可。所述凸轮结构的抵持可使得所述机臂锁固在所述折叠状态或飞行状态。
可以理解的是,虽然上所述的实施方式中采用凸轮结构来实现机臂的自动展开或折叠,但是能够实现机臂自动展开或折叠的结构并不限于凸轮结构,在其他实施例中,所述机臂连接结构可包括转动连接所述机臂至所述机身的转轴(例如,图4-图5中的转轴312、图6中的转轴320、图7-图8中的转轴330),一设置在所述机身10与所述机臂20之间的弹性元件(例如,图4-图5中的弹性元件314、图6中的弹性元件324、图7-图8中的连接部或转轴),当所述机臂在所述折叠位置和所述展开位置之间旋转至一极限位置时,能够使得所述弹性元件产生弹性形变,所述弹性形变产生的回复力能使得所述机臂在无外力作用的情况下能够自动展开至所述展开位置或自动折叠至所述折叠位置。
请参阅图9所示,为一种未采用凸轮结构的机臂连接结构。所述机臂连接结构包括转轴340和弹性元件344。机臂24通过所述转轴340可转动地连接至所述机身10,能够在折叠位置与展开位置之间转动。所述弹性元件344一端固定于所述机身10上,另一端固定于所述机臂24上。所述弹性元件344固定于所述机身10上的位置位于所述机臂在折叠位置时的反向延长线与所述机臂在展开位置时的反向延长线限定的范围内,如图中斜线部分。优选地,所述弹性元件344在所述机臂位于折叠位置与位于所述展开位置时的拉伸程度大致相同。所述极限位置为所述弹性元件344与所述机臂24大致平行且经过所述转轴340的中心点。所述极限位置能够根据所述机臂24的展开位置及所述弹性元件344在所述机身10上的位置及其弹性系数进行调整。所述极限位置可预设为所述机臂24相对所述机身10的极限角度,所述极限角度优选为30度到60度。可以理解,在其他实施例中,所述角度可为任意适宜的锐角,例如20度,25度,65度等。在一些实施例中,当所述机臂24位于所述展开位置(或所述飞行位置)时,所述弹性元件344可提供支持力以限定所述机臂24于所述展开位置,不再继续向远离所述折叠位置的方向旋转。
可以理解的是,在图4-图5、图6及图7-图8所示的实施例中,所述极限位置亦可设置为上所述的极限角度,所述极限角度的值也可设置为上所述的值。
在图4-图5、图6及、图7-图8及图9所示的实施例中,当所述机臂位于折叠位置时,所述机臂与所述机身10大致平行,所述机臂与所述机身10之间的角度大致为0,小于所述极限角度;当所述机臂位于所述展开位置时,所述机臂与所述机身10的角度为所述极限角度与所述极限位置到所述展开位置的角度的和,大于所述极限角度。
请参阅图10所示,示出了根据机臂状态控制UAV的系统模块图。所述系统可包括一个或多个传感器102,电池管理单元(Battery Management System,BMS)104,一个或多个电池106。
所述一个或多个传感器102用于感测或获取一个或多个机臂的状态信息。所述状态信息可包括速率、方向、姿态、重力、加速度、位置及/或任何其他物理状态信息。例如,所述状态信息可包括所述机臂相对所述UAV机身的方向。所述方向可包括相对于翻滚轴、偏航轴及俯仰轴的角度。在一些实施例中,所述一个或多个传感器102可包括惯性测量元件,例如,一个或多个陀螺仪、速度传感器、加速计、磁力仪及其类似物。在其他实施例中,其他类型的状态感测传感器可替代或配合所述惯性传感器使用。所述系统可进一步包括一个或多个处理器,用于根据所述状态信息计算所述机臂的姿态信息。例如,所探测得到的机臂的角速度或线速度可用于计算所述机臂相对于所述机身的位置,或相对于所述UAV的翻滚轴及/或偏航轴的位置。
在一些实施例中,所述一个或多个传感器102可包括接触开关。所述接触开关可包括设置在所述UAV上不同部位的多个触点。例如,第一触点可设置在一机臂上,第二触点可设置在该机臂与机身的连接处。当所述机臂位于一触发位置时,所述第一和第二触点可电连接而产生一电信号。所述触发位置可对应于,例如,展开状态、折叠状态或展开状态与折叠状态之间的某一特定位置。可替代地,所述触发位置可对应于机臂相对于机身的特定角度,或机臂之间的特定角度。
在一些实施例中,所述一个或多个传感器102可包括机械开关,当所述传感器102为机械开关时,所述机械开关的切换杆可设置在所述机臂与机身的结合处。当所述机臂位于一触发位置时,所述机臂的部分可推抵所述切换杆以触发所述机械开关。
所述触发位置可为一极限位置。所述电池管理单元104可根据所述机臂的位置产生一个或多个控制信号,以控制所述电池106。例如,当一个或多个机臂伸展超过所述极限位置时,所述电池管理单元104可开启所述电池106或连通所述电池106与所述UAV功能元件的电连接。所述电池管理单元104可进一步用于根据所述机臂的位置控制提供至所述UAV不同功能元件的电量。在一些实施例中,当一个或多个机臂伸展超过所述极限位置时,所述电池管理单元104可从所述电池106提供电能至所述UAV的飞行控制器。
所述电池管理单元104可用于根据用于控制所述机臂状态的一个或多个信号控制所述电池106提供电源至一个或多个驱动单元以伸展或折叠所述机臂。所述驱动单元可包括,例如,设置在一个或多个机臂上的一个或多个动力单元。所述动力单元可在电能的作用下驱动旋翼叶片旋转以作用于所述机身。当所述旋翼叶片推抵所述机身时,机身产生对机臂的反作用力,使得所述机臂向所述飞行状态伸展。在一些实施例中,一个或多个机臂的伸展可基于与所述UAV通信连接的外部设备发出的用户指令而触发。
图11示出了根据机臂状态控制UAV的另一系统模块图。图11所示的系统100结构类似于图10中的系统,其区别在于,图11中,所述机臂的位置状态可提供至一飞行控制器108。所述飞行控制器108可用于根据所述机臂的位置控制所述UAV上的一个或多个功能元件110的运行,或控制与所述UAV通信的外部设备的运行。例如,至少一机臂的伸展达到或超过一触发位置时可触发所述UAV上一个或多个功能元件108的运行。所述一个或多个功能元件可包括一个或多个电能消耗单元及一个或多个动力单元。所述动力单元可包括马达及旋翼叶片。
所述电能消耗单元可为动力单元外的其他功能元件。在一些实施例中,所述电能消耗单元可包括用于承载所述UAV的负载的载体。所述载体可包括一机动化的支架,用于控制所述负载的方向,使得所述负载可相对所述UAV的机身在一个以上的自由度移动。在一些实施例中,当所述机臂到达或超过一触发位置,所述飞行控制器108可生成一信号以控制所述支架从所述UAV的机身上的收容腔内伸展出来。可替代地,所述飞行控制器108还可生成一信号以控制所述支架收缩回所述UAV的机身上的收容腔内。所述支架可以用于承载图像传感器(如相机、单目传感器,双目传感器等)或其他传感器。
在一些实施例中,所述电能消耗单元还可是一机动化可伸缩的着陆架。所述飞行控制器108可用于根据所述机臂的位置控制所述着陆架的移动,使得所述着陆架位于伸展或收缩状态。例如,当所述UAV没被使用时或被一用户携带时,所述飞行控制器108可收缩所述着陆架。当所述UAV即将着陆于一表面(或放置在所述表面)时,所述飞行控制器108可展开所述着陆架。
在一些实施例中,所述电能消耗单元可为一个或多个能搜集及/或存储信息的元件。此种情况下,需要为所述电能消耗单元提供持续不断的电能以便能持续不断地处理、萃取或存储信息。所述电能消耗单元可以是一个或多个控制器(例如控制单元)、通信单元、导航单元、发射器(例如,光或声音发射器),及/或传感器。所述传感器可包括,但不限于位置传感器(例如,全球定位系统(GPS)传感器,能够三角测量定位的移动装置发射器),视觉传感器(例如,能感测可视的,红外的或紫外光的影像装置,例如相机),近距离传感器(例如,超声传感器,激光雷达,飞行时间相机),惯性传感器(例如,加速计,陀螺仪,惯性测量单元(IMUs)),高度传感器,压力传感器(例如,气压计),声音传感器(例如,麦克风)或磁场传感器(例如,磁力仪,电磁传感器)。任意适宜数量及组合的传感器可被采用,例如,一个,两个,三个,四个,五个或更多个。可选地,可从不同类型的传感器获取数据(例如,两种,三种,四种,五种或更多种)。不同类型的传感器可测量不同类型的信号或信息(例如,位置,方向,速率,加速度,距离,压力等)及/或利用不同类型的测量技术获取数据。例如,所述传感器可包括主动传感器(例如,产生及测量其自身能量的传感器)及被动传感器(感测可获取的能量的传感器)的任意适宜的组合。
另外,对于本领域的普通技术人员来说,可以根据本发明的技术构思做出其它各种相应的改变与变形,而所有这些改变与变形都应属于本发明权利要求的保护范围。
- 机架及使用该机架的无人机
- 机架组件及使用该机架组件的无人机