一种空投式无人机及其抛射方法
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及无人机技术领域,具体为一种空投式无人机及其抛射方法。
背景技术
无人机主要有以下特征:无人机折叠之后的尺寸较小,内部传感器的体积较大,无人机在使用的时候效率不够高,因此需要在有限空间内尽可能增加主翼面积。为保证航时要求,还需使展弦比较大,增加主翼气动效率。
在抛投阶段,要考虑高速展开问题,需使无人机减速到一定速度时,再展开主翼并转为正常飞行状态。
因此,需设计一种串列式、分段展开折叠翼布局无人机。
发明内容
(一)解决的技术问题
针对现有技术的不足,本发明提供了一种空投式无人机及其抛射方法,解决的无人机在有限空间内尽可能增加主翼面积。为保证航时要求,还需使展弦比较大,增加主翼气动效率问题。
现有方案无人机从高速载体弹出后,为保护机体结构不受高速气流冲击而损坏,在主翼展开前,需要使用减速伞进行减速,当速度减小到安全范围之内,才能完成主翼的展开动作,并转换到飞行状态。本发明提供了各部分分段展开的结构和控制方案,利用机身和主翼在不同展开角度的气动力阻力,实现对无人机的减速控制,从而不需要使用减速伞,达到减轻重量和结构复杂度的目的。
(二)技术方案
为实现以上目的,本发明通过以下技术方案予以实现:一种空投式无人机,包括无人机,所述无人机包括无人机机身、旋转机翼、安装在大型空中载体下端的发射筒,所述无人机机身的中间机械阻尼蓄能旋转连接有旋转机翼,所述机械阻尼蓄能连接在无人机机身的控制系统,所述无人机机身尾部通过机械阻尼蓄能二连接有旋转尾翼,所述发射筒内部是设置有无人机,所述无人机机身为多边形的外形结构。
优选的,所述无人机为多个,所述无人机在发射筒为圆周方式进行排列、前后依次排列中的任意一种排列方式。
优选的,前后依次排列的多个所述无人机之间均设置有整流罩,整流罩用于防止前机发射时的火焰或压力对发射筒中的其后的无人机产生破坏。
优选的,所述无人机机身内部设置有无人机系统,所述无人机系统包括航电系统、能源系统、动力系统、载荷系统、天线、控制系统,所述控制系统电性连接航电系统、能源系统、动力系统、载荷系统、天线。
一种空投式无人机的抛射方法,所述抛射方法步骤如下:
无人机抛射展开过程分为:抛投阶段、减速稳定阶段、减速稳定阶段、飞行阶段四个阶段;
步骤1:抛投阶段;
无人机以折叠状态从发射筒内分离,机体以最小截面积状态接触大气,将冲击过载降到最小限度,保护机体结构;机载导航和控制系统采用延时上电的方式,确保冲击过载不对传感器造成损坏;
步骤2:减速稳定阶段;
无人机相对稳定后,控制系统控制V型尾翼展开,导航系统开始快速初始对准,恢复无人机的姿态、速度和位置测量,并控制V型尾翼,将飞行器姿态控制在俯仰角-10 ~ -20度,滚转角±10度以,航向角任意的范围内的大攻角飞行状态,将速度从150m/s减小到70 ~90m/s;
步骤3:减速稳定阶段;
无人机主翼采用机械阻尼蓄能展开机构,控制系统触发主翼展开,主翼以40度/秒的速度展开;
在展开过程中,速度进一步减小到50 ~ 70m/s,同时无人机俯仰角恢复到0 ~ 4度,滚转角±3度,航向角稳定的状态;
步骤4:飞行阶段;
无人机主翼完全打开,速度减小到35m/s,螺旋桨开始工作,进入航线飞行模式;
天线靠机械触发装置自动弹出,任务载荷上电,进入工作状态。
(三)有益效果
本发明提供了一种空投式无人机。具备以下有益效果:
采用串列式固定主翼式布局,折叠式V型尾翼设计,因此采用V型尾翼的控制是影响飞行性能最关键的因素,无人机发射后的初始对准过程及展开主翼和V尾的变结构控制过程,这三个要点是物理仿真需要着重考察的,因为快速准确的初始对准、平稳的过渡过程、V型尾翼的特殊控制方式都直接影响无人机的最基本的巡航效果。
同时在减速过程中,主翼先处于折叠状态,V型尾翼可实现稳定无人机姿态的功能,当速度减小到巡航速度附近时主翼完成展开动作,无人机转化为巡航飞行模式。
本发明的结构简单、所需舵机功率小,可以减小舵机体积和重量;姿态控制效率较高。
附图说明
为了更清楚地说明本发明实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
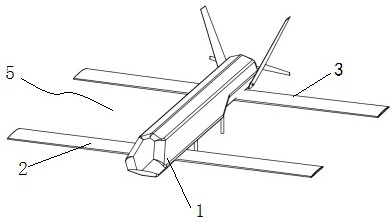
图1为本发明的装配立体结构图;
图2为本发明的航电系统的原理图;
图3为本发明的无人机控制系统的原理图;
图4为本发明的动态逆控制原理图;
图5为本发明的姿态回路数字仿真分析图;
图6为本发明的无人机采用圆周方式进行排列的结构立体图;
图7为本发明的无人机采用圆周方式进行排列的截面结构图;
图8为本发明的无人机折叠状态结构立体图;
图9为本发明的无人机采用前后依次排列的截面结构图。
图中:无人机机身1、旋转机翼2、旋转尾翼3、发射筒4、无人机5、整流罩6。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
请参阅图1-9,本发明提供一种技术方案:一种空投式无人机,包括无人机5,无人机5包括无人机机身1、旋转机翼2、安装在大型空中载体下端的发射筒4,无人机机身1的中间机械阻尼蓄能旋转连接有旋转机翼2,机械阻尼蓄能连接在无人机机身1的控制系统,无人机机身1尾部通过机械阻尼蓄能二连接有旋转尾翼3,发射筒4内部是设置有无人机5。无人机5为多个,无人机5在发射筒4为圆周方式进行排列、前后依次排列中的任意一种排列方式。前后依次排列的多个无人机5之间均设置有整流罩6,整流罩6用于防止前机发射时的火焰或压力对发射筒中的其后的无人机5产生破坏。无人机机身1内部设置有无人机系统,无人机系统包括航电系统、能源系统、动力系统、载荷系统、天线、控制系统,控制系统电性连接航电系统、能源系统、动力系统、载荷系统、天线;所述无人机机身1为多边形的外形结构,可减小雷达反射面积。
实施例:
一、如图2航电系统主要由组合导航系统、控制系统、动力学模型组成。组合导航系统使用的是组合导航系统,组合导航系统有着独立的各种导航设备,通过计算机有机组合,并使用信息融合技术完成数据集成,使系统自动化程度、精度和可靠性大为提高。组合导航设备数据可以是对被控对象状态的先验信息和预测信息,也可以是对被控对象的各种测量体制下的各类测量信息,如相同体制和不同体制下的测量数据、同一系统中多通道同质测量数据、不同系统的同质测量数据、不同体系下的异质测量数据、不同时段的联合测量数据等。
机载计算机完成捷联式惯导方程的计算与数据融合,从而获得飞机的位置、高度、速度、姿态、航向、滚转角速率等状态数据。机体状态数据的采集、处理和存储速率为100Hz。
选通器采集来自RC遥控器接收机的控制指令,作为辨识模型的激励信号,同时完成对飞控计算机与手动遥控指令的选通。所有飞行与控制指令均储存在机载计算机中。并在试飞结束后下载飞行数据进行数据处理及参数辨识。其控制输入速率为50Hz。
二、无人机控制系统由姿态控制、速度控制和位置控制组成,如图3所示。通过对模型的分析和仿真,无人机内环可用一阶系统近似表示,姿态控制用传统LQR控制律就可达到良好的稳定性和响应速度;无人机垂直通道由于旋翼零升阻力的存在,使该方向等效阻尼比较大,因此对垂直速度的控制,用传统LQR控制律也可有效进行控制;
水平速度控制中,由于存在由向心力引起的平衡点偏移问题,所以采用上一节提出的基于非线性工作点校正的控制方法,具体实现方法如下:
指令模型使用简单的一阶模型:
其中
转化为状态空间形式:
让实际系统速度追踪参考速度,令
由式(3.9)可得参考俯仰角:
由式(3.10)可得参考滚转角:
在设计过程中,根据实际需要,取指令模型的时间常数为
由于飞行器模型姿态角用欧拉角表示,因此在俯仰角为+90度时,滚转角失去意义,会产生陀螺锁效应。但在实际飞行过程中,飞行器会很少遇到这种现象,可适用于一般机动飞行。
三、建立无人机的气动力学模型如下:
飞行过程中的无人机是一个非常复杂的力学系统。此外由于受到外力与内力的作用无人机的结构也在发生着不定的弹性变形。不仅如此,地球旋转产生的哥氏加速度与离心加速度,以及由于高度变化产生的重力加速度变化都会对作用于无人机上的空气动力、机翼形状、飞行运动参数产生影响,这样就增加无人机的运动方程建立的复杂性。考虑到这些影响因素的影响,在建立无人机运动方程时为了省去这些次要因素的影响做出一些假设如下:
1)无人机视为刚体且质量是常数,2)地面坐标系为惯性坐标,3)不考虑地球曲率的影响,视地球为平板地球,4)忽略重力加速度受高度变化产生的影响,5)视无人机为对称布局飞行器,其内部质量也对称分布。
刚体无人机的空间运动需要六个自由度来描述:质心的位移(无人机纵向的升降、侧向运动以及速度的增减运动)、绕质心的运动(无人机的俯仰角运动、偏航角运动以及滚转角运动)。
无人机质心运动的动力学方程组可以描述为:
无人机绕质心转动的动力学方程组
式中
无人机质心运动学方程
无人机绕质心转动的运动方程
角度几何关系方程
总的运动方程组
四、快速对准
飞行机体的姿态是指机体坐标系相对地面坐标系的姿态,通常用三个角度(称欧拉角)来确定,这三个角度就是所需测量的机体俯仰角、偏航角、滚转角。
地面坐标系是和地球表面固联的右手笛卡儿坐标系(Axyz)。坐标系原点A通常选取在弹药发射点上。Ax轴指向可以是任意的,对于地面目标而言,Ax轴是弹道平面与水平面交线,指向目标为正。Ay轴沿垂线向上,Az轴与其他两个坐标系垂直并构成右手直角坐标系。
机体坐标系是和机体固联的右手笛卡儿坐标系(Ox
俯仰角:机体的纵轴与水平面(Axz平面)的夹角,机体纵轴指向水平面上方为正,反之为负。
偏航角φ:机体纵轴在水平面内的投影(即图中的Ax’)与地面坐标系Ax轴之间的夹角。迎φ角平面,若由Ax轴转至Ax’轴是逆时针旋转,则φ为正,反之为负。
滚转角γ:机体坐标系的Oy
地面坐标系和机体坐标系的转换矩阵为
姿态角
式中
矢量磁力计是这样一种磁传感器,它的输出与沿传感器轴磁场强度成比例。为了测量机体体态,在机体上安装了一个三轴矢量磁力计,传感器轴平行于机体坐标系,地球磁场在传感器轴上的投影可有下式得到。定义
引用矢量的绝对导数和相对导数之间的关系。在惯性坐标系中某一矢量对时间的导数(绝对导数)与同一矢量在动坐标系中对时间的导数(相对导数)之差,等于这矢量本身与动坐标系的转动角速度的矢量乘积。
考虑地固坐标系的y轴沿地磁场方向,命名该坐标系为磁场坐标系,用下标m描述。则在该坐标系下的地磁矢量为
机体相对磁场坐标系的姿态,也可以用三个角度(称磁欧拉角)来确定。
五、抛射展开
针对无人机抛射方法,主要目的是保证无人机在抛射过程中的无人机方向的大致稳定,以及获得足够的能量,保证无人机达到相应的高度以及旋翼的正常展开,从而实现无人机的正常工作。
无人机抛射后投放后初始条件为:
速度:≤150m/s;
投放高度:≥350m;
投放弹道倾角:-13°~ -71°;
为解决上述问题,实现无人机的正常抛射,抛射方法设计如下:
无人机抛射展开过程分为:抛投阶段、减速稳定阶段、减速稳定阶段、飞行阶段四个阶段。
无人机的机身结构和机翼均采用碳纤维承力蒙皮的复合材料结构。保证内部有足够空间安装任务载荷。
六、参数不确定性的飞行器的变结构姿态控制分析如下:
无人机在从弹筒中抛射到空中的过程中,其旋翼由于在空中展开会导致惯性参数不确定性,且在飞行过程中存在气动力参数不确定性、气动力矩参数不确定性和风的干扰。其飞行轨迹的调整是通过姿态的调整来实现的,为了能在这些不确定性和风干扰存在的条件下,使其能够顺利恢复稳定的飞行状态,就必须依靠姿态控制系统来实现。通过考虑气动力矩参数的不确定性, 建立具有积分型滑模的变结构姿态控制系统,可以实现含有包括变结构等多种不确定性的飞行器的姿态控制。
飞行器在空间的运动分为随质心的平动和相对于质心的转动。转动运动学方程和动力学方程为:
6.1基于动态逆的姿态控制
动态逆控制的目的是当要将原非线性系统线性化时可以通过给原非线性系统构建一个非线性控制输入使其线性化, 线性化之后,所有的线性系统的控制方法就能应用,飞行器的姿态控制问题属于多变量的非线性控制问题。
动态逆控制依照时间尺度分离原理, 具有性能鲁棒性和稳定鲁棒性。控制方案采用两环结构, 分别对应于快变系统和慢变系统, 这种分离在工程中是符合实际要求的。因为飞行器的体轴角速度比攻角角速度、侧滑角角速度快。按照实际的设计要求, 快速环的带宽是慢环的三到五倍。动态逆控制原理图如图4;
如图5:通过姿态回路数字仿真分析,该方法与传统输出反馈控制律对比,具有超调小,调节时间短等优点,满足本方案对调节时间的要求。
6.2变结构控制律设计
基于动态逆和变结构的控制思想。以下将飞行器的转动动力学方程写成更为通用的包含了不确定性的形式
两环系统的稳定性分析分两步:第一步,讨论在
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下。由语句“包括一个......限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素”。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种空投式无人机及其抛射方法
- 一种大中型固定翼无人机空投系统及空投控制方法