一种基于二维Kernel DM+V算法的稳态环境参数场重建优化算法
文献发布时间:2023-06-19 11:29:13
技术领域
本发明属于环境监测、控制领域,具体涉及稳态环境参数场(例如:温湿度、颗粒物浓度、挥发类有机物等)重建问题,目的在于量化环境参数在空间中的分布,并以分布图的形式进行可视化。
背景技术
空气污染已经成为影响人民生活品质,威胁人民生命健康的重要因素,并日益得到人们的广泛关注。在众多污染物来源中,能否有效防止有毒有害物质的扩散成为保障人民财产与生命安全的热点问题。但是由于目标物质在环境中的分布具有不可视的特性,这一特性的存在使得处理突发事件时(例如化工厂中无色无味的化学试剂的泄露;地下管廊中燃气管道的泄露等),在指导人员疏散和救援上带来了极大困难。因此,通过对目标环境参数在空间中的分布进行量化,标识异常环境参数聚集区域,辅助定位污染物的泄漏点显得尤为重要。
前人利用不同的方法(拉格朗日粒子模型法,计算流体力学方法(CFD)、三次插值法、Kernel系列方法等)在环境参数场重建领域作出很多有意义的探索。Pyk et al.[1]把收集到的63个位置处的测量数据时均处理后,利用三次插值的方法预测出未测量位置处的浓度,通过这种方法重建出环境参数分布图。这种方法仅仅利用简单的数学插值公式,并未考虑到风场对环境参数扩散的影响。Graff[2]在风洞实验中,把采集到的点源浓度分布数据与利用拉格朗日粒子模型模拟出的浓度分布相对比,验证了拉格朗日粒子色散模型的性能。这种方法利用计算机模拟软件进行仿真计算,需要耗费大量的计算时间。Lilienthalet al.[3]提出一种Kernel DM(kernel distribution mapping)算法。该算法的核心思想是利用一个高斯核函数把传感器采集到的数据进行空间外推,从而预测出未采样位置处的环境参数数值,最终获得环境参数在空间中的分布。这种方法利用统计学的概念把传感器采集到的环境参数视为随机变量,极大的提高了环境参数场重建的速度。但这种方法并未考虑环境参数受湍流影响的波动特性,也没有考虑风场对环境参数分布的影响。Lilienthal et al.[4]在Kernel DM的基础上进一步发展,提出了Kernel DM+V算法,该算法不仅能够估计每个网格的环境参数均值,而且能够估计各个网格的预测方差。这种方法虽然对湍流影响下环境参数在空间中分布的波动特性进行建模,但是并未考虑风场带来的影响。Reggente et al.[5]注意到局部风场是影响气体扩散的一个重要参数,因此他们重建环境参数分布时把流场中的风向和风速信息纳入考虑,在Kernel DM+V的基础上提出了Kernel DM+V/W算法。该算法通过把Kernel DM+V中的圆形高斯核沿着风向拉伸成椭圆形的方式,考虑了局部风场对于环境参数的影响。但这种方法并未考虑到测量点处的环境参数对测量点的上风区和下风区具有不同的影响。
本发明提出了一种基于二维Kernel DM+V算法的稳态环境参数场重建优化算法。着重对技术路线中的步骤(2)进行优化,使其可以在稳态流场下,对目标环境参数在空间中的分布进行快速重建。本课题组过去提出了一种“基于改进的二维稳态Kernel DM+V/W的分布地图构建方法”。该发明所涉及的方法虽然修正了测量点处的环境参数对上、下风区影响权重一致的弊端,但是依旧沿用了Kernel DM+V/W方法拉伸高斯核形状的方式,这种方式在计算权重函数时涉及多个矩阵计算,使得在大范围的环境数场重建时需要浪费计算机大量的计算资源,难以满足实时快速重建环境参数的要求。本发明提出在基本的高斯核函数的基础上引入局部信息项,无需拉伸高斯核的形状,亦不会进行冗余的矩阵计算,在保证计算精度的基础上节省了计算机的计算成本。
[1]Pyk P,i Badia S B,Bernardet U,et al.An artificial moth:Chemicalsource localization using a robot based neuronal model of moth optomotoranemotactic search[J].Autonomous Robots,2006,20(3):197-213.
[2]Graff A.The new German regulatory model-A Lagrangian particledispersion model[C]//Proceedings of the 8th International Conference onHarmonisation within Atmosperic Dispersion Modelling for Regulatory Purposes,Sofia,Bulgaria.2002:14-17.
[3]Lilienthal A,Duckett T.Building gas concentration gridmaps with amobile robot[J].Robotics and Autonomous Systems,2004,48(1):3-16.
[4]Lilienthal A J,Asadi S,Reggente M.Estimating predictive variancefor statistical gas distribution modelling[C]//AIP ConferenceProceedings.American Institute of Physics,2009,1137(1):65-68.
[5]Reggente M,Lilienthal A J.Using local wind information for gasdistribution mapping in outdoor environments with a mobile robot[C]//SENSORS,2009 IEEE.IEEE,2009:1715-1720.
发明内容
针对现有技术的不足,提出了一种基于二维Kernel DM+V算法的稳态环境参数场重建优化算法,能够在稳态流场下,对目标环境参数在空间中的分布进行快速准确重建。具体技术方案如下:
(1)把受试空间平面离散成M×N的网格;
(2)识别每个测量点所在网格位置,并利用
(3)根据步骤(2),每个测量点处环境参数值对所有网格的影响权重乘以该测量点处的环境参数数值
(4)根据公式
(5)按照步骤(4)相同方式,对加权环境参数值进行累加,得到整个环境空间的加权环境参数值累加和R
(6)为了评估利用已有环境参数值预测出的未采样位置处的环境参数值的可信度,对每个二维空间网格计算置信度值α
(7)计算每个空间网格的环境参数均值估计值r
(8)计算每个空间网格的环境参数方差估计值v
所述步骤(2),在计算每个测量点处环境参数值对所有网格的影响权重
所述步骤(2),在局部风信息项
所述步骤(2),局部风信息提供了环境参数的传播路径,顺着气流前进方向的区域更容易受到上游环境参数传播的影响,通过利用局部风信息项对权重分配进行修正,使得测量点下风区的权重始终大于上风区,权重分配更加合理。
本发明的优势在于在参数场重建过程中考虑了局部风场信息对污染物的扩散作用,并且对局部风信息的使用方式和已有的Kernel DM+V/W算法不同。本发明遵循“污染物随气流从上风区向下风区扩散,下风向的区域更易受到污染物扩散的影响”的污染物传播的客观规律。在计算周围网格受测量处环境参数影响的权重时引入局部风信息项,对测量点周围网格的影响权重进行调整,克服了过去Kernel DM+V/W算法在测量点上风区和下风区权重分配一致的问题,使得本发明所提出的环境参数优化算法能够使用较少的环境参数数据重建出更高质量的环境参数分布场。与传统CFD方法相比,计算速度大幅度提高;本发明能够在稳态流场下,对目标环境参数在空间中的分布进行快速准确重建。
附图说明
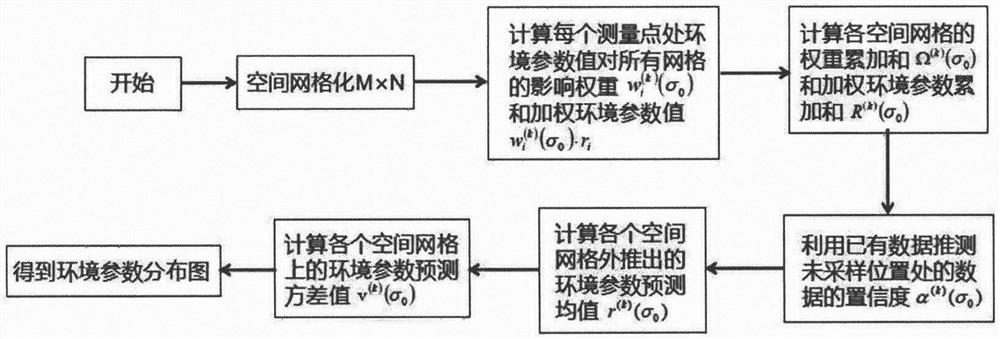
图1为本发明实施方式中所述一种基于二维Kernel DM+V算法的稳态环境参数场重建优化算法流程示意图。
图2为某一空间网格受环境参数影响的权重计算原理图。
图3a为利用本发明提出的算法重建出的环境参数预测均值分布图。
图3b为利用本发明提出的算法重建出的环境参数预测方差分布图。
图4为不同环境参数场方法预测出的环境参数分布的NLPD值随数据量的变化曲线。
具体实施方式
下面结合附图和实例,对本发明的具体实施方式作进一步详细描述,以下实例用于说明本发明,但不用来限制本发明的范围。阅读完本发明的内容后,本领域的技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本申请所附权利要求所限定的范围。
1)把环境空间离散成M×N的网格,并获知每个环境参数(x
其中:
公式(1)中δ
所述i为环境参数传感器序号;
所述k为网格单元序号;
所述u
所述x
其中:
公式(2)中,所述
所述β为风速因子;
所述θ为目标网格中心与测量点所在网格中心连线与风向的夹角。
2)把每个测量点对空间网格的影响权重进行累加,得到所有测量点对整个环境空间的权重累加和Ω
其中:
所述n为采集到的环境参数数量;
所述r
3)计算利用采集到的环境参数外推出未采样位置处的环境参数数值的置信度α
其中:
所述σ
4)利用上述计算出的Ω
其中:
所述r
5)通过计算各个空间网格上的环境参数预测方差值v
其中:
公式(7)中的v
所述r
公式(7)中的V
其中:
公式(9)中所述τ
6)通过上述公式,利用已有的环境参数数据进行加权外推,预测出任意位置处的环境参数均值分布图(如图3a所示)和环境参数方差分布图(如图3b所示),从而构建出稳态流场下的环境参数场。
本发明在计算周围网格受测量点处环境参数影响的权重时,引入局部风信息项
实施案例:
利用置换通风CFD仿真结果的一个切面作为真实的环境参数场分布。从该仿真切面中按照2.5%、5%、10%、20%、40%、60%的比例进行采集数据,按上述比例分别利用过去已有的Kernel DM+V、Kernel DM+V/W和本发明提出的方法(在此称为Kernel DM+V/W+)进行环境参数场重建效果量化比较。
Kernel DM+V算法是本发明提出的基础,该方法仅利用高斯核函数对已有的环境参数值进行空间外推预测其他空间位置上的环境参数值,但是未使用测量点处的局部风信息,没有考虑局部风场对环境参数在空间中的传播造成的影响。Kernel DM+V/W算法是目前使用局部风信息进行环境参数场重建算法中比较成熟的方法,该方法通过沿测量点局部风向拉伸高斯核形状从而使环境参数场重建与局部风场建立联系,但是该方法存在测量点上、下风场权重分配一致的弊端。
为了量化比较,通过最小化NLPD代价函数来评价三种算法重建环境参数场的性能优劣。NLPD的值反映了实测的环境参数数值与重建出的环境参数场之间的偏离程度;数值越低,表明该方法能够准确的重建出环境参数场。所述NLPD的具体表达式为:
其中:
所述
所述r
所述
图4为不同环境参数场方法预测出的环境参数分布的NLPD值随数据量的变化曲线。从图4中可以看出,除了在10%数据量条件下,利用本发明提出的算法的NLPD值高于Kernel DM+V/W算法;其他数据量下,本发明提出的NLPD值均低于其他两种已有的环境参数场重建算法。这说明本发明提出的一种基于二维Kernel DM+V算法的稳态环境参数场重建优化算法可以有效准确地重建环境参数场。
- 一种基于二维Kernel DM+V算法的稳态环境参数场重建优化算法
- 基于热线阵列和智能二维重建算法的流速场测量系统