传感器的标定装置
文献发布时间:2023-06-19 11:29:13
技术领域
本公开涉及传感器技术领域,具体地,涉及一种传感器的标定装置。
背景技术
相关技术中,在对传感器进行标定时,一般将传感器与标定板分别固定在两个物体上,通过尺子等量具测量传感器与标定板的距离,之后通过测量的距离在对传感器进行标定,或者固定数个不同距离的点位,确定点位与标定板的距离后,通过将传感器放置在不同点位上进行校准标定。然而目前的标定方式标定精度较低,且标定过程繁琐,导致标定效率低。
发明内容
本公开的目的是提供一种传感器的标定装置,该标定装置能够在实现传感器动态标定的同时,提高标定效率并保证标定精度。
为了实现上述目的,本公开提供一种传感器的标定装置,所述标定装置包括标定板、滑轨、平移驱动机构、第一安装支架以及位置传感器,所述标定板通过滑块滑动连接于所述滑轨,所述平移驱动机构用于驱动所述标定板沿所述滑轨滑动,所述第一安装支架设置于所述滑轨的延伸方向上并设置有用于安装待标定传感器的安装座,所述位置传感器用于检测所述滑块的位置坐标,以用于标定所述待标定传感器。
可选地,所述标定装置还包括距离传感器,所述距离传感器设置于所述安装座上并用于检测自身与所述标定板的距离,所述标定装置具有校准位置和标定位置,在所述校准位置,所述位置传感器和所述距离传感器均工作,且通过所述距离传感器校准所述位置传感器;在标定位置,所述位置传感器工作,所述距离传感器不工作,且通过所述位置传感器标定所述待标定传感器。
可选地,所述标定装置包括枢转驱动机构和转角检测机构,所述枢转驱动机构用于驱动所述待标定传感器绕预设枢转轴线转动,所述转角检测机构用于检测所述待标定传感器的转角。
可选地,所述转角检测机构包括设置于所述安装座的呈圆盘状的角度尺,所述角度尺的中心轴线与所述预设枢转轴线重合设置,所述枢转驱动机构用于驱动所述待标定传感器相对于所述角度尺转动。
可选地,所述转角检测机构包括角度检测传感器,所述角度检测传感器能够随所述待标定传感器同步转动。
可选地,所述第一安装支架包括垂直于所述滑轨设置的立柱,所述安装座可上下滑动地连接于所述立柱。
可选地,所述标定装置包括第一减振器,所述安装座通过所述第一减振器连接于所述第一安装支架;所述标定装置包括第二安装支架和第二减振器,所述第二安装支架通过第二减振器连接于所述滑块,所述标定板固定于所述第二安装支架。
可选地,所述位置传感器包括标识部和识别部,所述标识部固定于所述滑轨并沿所述滑轨的延伸方向延伸布置,所述识别部设置于所述滑块并能够随所述滑块同步移动,以根据所述识别部识别到的所述标识部当前标识,确定所述滑块相对于所述滑轨的位置坐标。
可选地,所述平移驱动机构包括驱动电机和传动结构,所述驱动电机连接于所述滑轨,该驱动电机通过传动结构驱动所述标定板沿所述滑轨移动。
可选地,所述滑轨在延伸方向上具有相对设置的第一端和第二端,所述驱动电机和所述第一安装支架的一者设置于所述第一端,所述驱动电机和所述第一安装支架中的另一者设置于所述第二端。
通过上述技术方案,在本公开提供的传感器的标定装置中,在对待标定传感器进行标定时,平移驱动机构能够驱动标定板在滑轨上移动,以持续改变标定板与待标定传感器之间的距离,在标定板移动的过程中,位置传感器能够持续检测滑块的位置坐标,进而通过换算该位置坐标能够对待标定传感器进行动态的标定,从而在实现待标定传感器的动态标定的同时能够提高标定效率;由于滑块在滑轨上的滑动较为稳定,因此,通过位置传感器检测到的滑块的位置坐标较为精确,避免了出现标定板晃动而导致位置传感器的位置坐标发生跳动的现象,从而通过该位置坐标能够提高对待标定传感器的标定精度。
本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
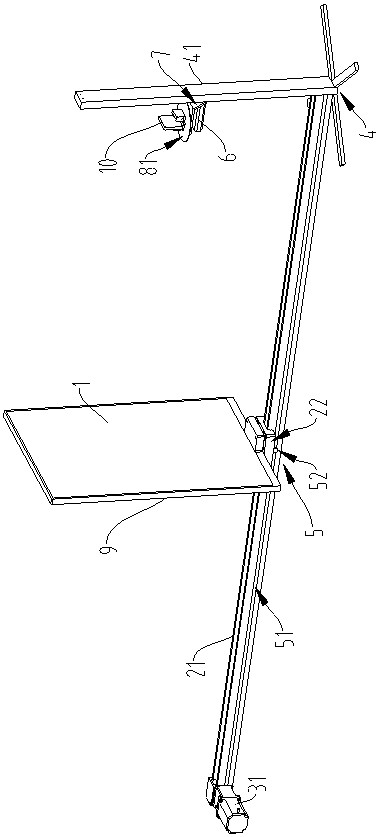
图1是根据本公开实施例提供的传感器的标定装置的结构示意图。
附图标记说明
1-标定板,21-滑轨,22-滑块,31-驱动电机,4-第一安装支架,41-立柱,5-位置传感器,51-标识部,52-识别部,6-距离传感器,7-安装座,81-角度尺,9-第二安装支架,10-待标定传感器。
具体实施方式
以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
在本公开中,在未作相反说明的情况下,使用的方位词如“上、下”是基于图1定义的,具体地,图1中图面的左侧可以指代上侧,右侧可以指代下侧,上下方向对应于垂向。使用的术语“第一、第二”是为了区分一个要素和另一个要素,不具有顺序性和重要性。
根据本公开的具体实施方式,提供一种传感器的标定装置,参考图1中所示,所述标定装置包括标定板1、滑轨21、平移驱动机构、第一安装支架4以及位置传感器5,所述标定板1通过滑块22滑动连接于所述滑轨21,所述平移驱动机构用于驱动所述标定板1沿所述滑轨21滑动,所述第一安装支架4设置于所述滑轨21的延伸方向上并设置有用于安装待标定传感器10的安装座7,所述位置传感器5用于检测所述滑块22的位置坐标,以用于标定所述待标定传感器10。
通过上述技术方案,在本公开提供的传感器的标定装置中,在对待标定传感器10进行标定时,平移驱动机构能够驱动标定板1在滑轨21上移动,以持续改变标定板1与待标定传感器10之间的距离,在标定板1移动的过程中,位置传感器5能够持续检测滑块22的位置坐标,进而通过换算该位置坐标能够对待标定传感器10进行动态的标定,从而在实现待标定传感器10的动态标定的同时能够提高标定效率;由于滑块22在滑轨21上的滑动较为稳定,因此,通过位置传感器5检测到的滑块22的位置坐标较为精确,避免了出现标定板1晃动而导致位置传感器5的位置坐标发生跳动的现象,从而通过该位置坐标能够提高对待标定传感器10的标定精度。
需要说明的是,由于滑块22的位置坐标仅在与滑轨21平行的方向上变化,因此,通过滑块22的位置坐标即能够简单快速换算出标定板1与待标定传感器10之间的距离,进而通过对比待标定传感器10自身检测的距离即能够实现对待标定传感器10的标定。另外,本公开中的位置传感器5需经校准后使用,这里,本公开对位置传感器5的具体校准方式不作限制,例如,位置传感器5可以通过人工校准的方式进行校准,也可以通过其他方式进行校准,本公开将在下面的实施方式中详细介绍。此外,本公开中的第一安装支架4可以连接于滑轨21,也可以与滑轨21分离设置,本公开对此不作限制。
此外,还需要说明的是,本公开的标定装置可以对多种类型的传感器进行标定,例如tof(Time of Flight)传感器、雷达传感器以及双目传感器等,本公开对此不作限制。
在本公开的具体实施方式中,参考图1中所示,所述标定装置还可以包括距离传感器6,所述距离传感器6设置于所述安装座7上并用于检测自身与所述标定板1的距离,所述标定装置具有校准位置和标定位置,在所述校准位置,所述位置传感器5和所述距离传感器6均工作,且通过所述距离传感器6校准所述位置传感器5;在标定位置,所述位置传感器5工作,所述距离传感器6不工作,且通过所述位置传感器5标定所述待标定传感器10。这样,在校准位置,由于标定板1是基本静止的,因此距离传感器6测得的自身与标定板1的距离数据较为精确,通过距离传感器6能够对位置传感器5进行较为精确的校准;在标定位置,校准后的位置传感器5能够对待标定传感器10进行标定,保证待标定传感器10的标定精度。从而本公开的标定装置还能够实现位置传感器5的校准,提高自身的通用化程度。这里,在校准位置,本公开可以通过人工观察距离传感器6的数据以及位置传感器5的数据进行人工校准,也可以通过控制器自动实现对位置传感器5的校准,本公开对此不作限制。另外,根据一些实施例,在校准位置,标定板1可以位于待标定传感器10的最小量程处,本公开对此不作限制。
在本公开的具体实施方式中,所述标定装置可以包括枢转驱动机构和转角检测机构,所述枢转驱动机构用于驱动所述待标定传感器10绕预设枢转轴线转动,所述转角检测机构用于检测所述待标定传感器10的转角。这样,通过枢转驱动机构能够调整待标定传感器10的转角即改变其至少部分空间姿态,通过角度检测机构能够检测待标定传感器10的转角,进而通过转角和待标定传感器10的数据就可以通过换算得出待标定传感器10与标定板1的最短距离,通过对比该最短距离与位置传感器5的数据,就能够对该空间姿态下的待标定传感器10进行标定,从而本公开的标定装置还可以实现对不同姿态下的待标定传感器10的标定,例如实现不同姿态下的雷达传感器或者双目传感器的标定,有效提高自身的通用性。这里,本公开对预设枢转轴线的延伸方向不作限制,例如,该预设枢转轴线可以水平延伸设置,也可以沿垂向延伸设置。
需要说明的是,本公开对枢转驱动机构的具体结构不作限制,例如,该枢转驱动机构可以包括枢转电机和枢转轴,通过枢转电机驱动枢转轴的转动可以带动待标定传感器10转动,这里枢转轴的中心轴线即为预设枢转轴线。另外,本公开对转角检测机构的具体结构也不作限制,本公开将在下面的实施方式中详细介绍。
在本公开的一些实施方式中,参考图1中所示,所述转角检测机构可以包括设置于所述安装座7的呈圆盘状的角度尺81,所述角度尺81的中心轴线与所述预设枢转轴线重合设置,所述枢转驱动机构用于驱动所述待标定传感器10相对于所述角度尺81转动。这样,通过观察角度尺81即可以直观的得出待标定传感器10的转角,易于实现。
在本公开的一些实施方式中,所述转角检测机构可以包括角度检测传感器,所述角度检测传感器能够随所述待标定传感器10同步转动。这样,通过角度检测传感器能够精确获得待标定传感器10的转角,当角度检测传感器与角度尺81搭配使用时,二者能够相互验证,有效提高对转角检测的精确性。这里,本公开对角度检测传感器的具体结构不作限制,根据一些实施例,该角度检测传感器可以构造为编码器,也可以通过光栅结构进行检测。
在本公开的具体实施方式中,参考图1中所示,所述第一安装支架4可以包括垂直于所述滑轨21设置的立柱41,所述安装座7可上下滑动地连接于所述立柱41。这样,能够灵活调整安装座7的上下方向的位置,一方面能够便于待标定传感器10的安装,另一方面也能够调整待标定传感器10的上下位置,适用例如双目传感器的不同视角(面向标定板)下的标定,提高标定装置的通用性。这里,安装座7可以通过人工操作上下移动,可以通过驱动装置的驱动上下移动,本公开对此不作限制。这里,根据一些实施例,驱动装置可以包括电机和丝杠螺母传动结构,也可以包括电机和齿轮齿条传动结构,本公开对此不作限制。
在本公开的具体实施方式中,所述标定装置可以包括第一减振器,所述安装座7通过所述第一减振器连接于所述第一安装支架4,这样,通过第一减振器能够防止来自第一安装支架4的振动传递至安装座7,影响待标定传感器10自身的检测精度,降低标定失败的概率;参考图1中所示,所述标定装置可以包括第二安装支架9和第二减振器,所述第二安装支架9可以通过第二减振器连接于所述滑块22,所述标定板1固定于所述第二安装支架9,这样,通过第二减振器能够防止来自滑块22的振动传递至标定板1而引起标定板1晃动,影响待标定传感器10自身的检测精度,降低标定失败的概率。
在本公开的具体实施方式中,参考图1中所示,所述位置传感器5可以包括标识部51和识别部52,所述标识部51固定于所述滑轨21并沿所述滑轨21的延伸方向延伸布置,所述识别部52设置于所述滑块22并能够随所述滑块22同步移动,以根据所述识别部52识别到的所述标识部51当前标识,确定所述滑块22相对于所述滑轨21的位置坐标。这样,通过标识部51与识别部52的配合能够实现对滑块22位置坐标的持续检测。这里,识别部52与标识部51的识别方式本公开不作限制,例如,可以通过磁场的变化实现对标识部51位置的标识。
在本公开的具体实施方式中,平移驱动机构可以以任意合适方式构造,参考图1中所示,所述平移驱动机构可以包括驱动电机31和传动结构,所述驱动电机31连接于所述滑轨21,该驱动电机31通过传动结构驱动所述标定板1沿所述滑轨21移动。这样,通过传动结构能够将驱动电机31传递的驱动力平稳地传递到滑块22上,保证滑块22的平稳滑动。这里,本公开对传动结构的具体结构不作限制,例如,传动结构可以构造为传动带,滑块22可以固定在传动带上,当然,传动结构也可以构造为齿轮齿条结构。
在本公开的一些实施方式中,参考图1中所示,所述滑轨21在延伸方向上可以具有相对设置的第一端和第二端,所述驱动电机31和所述第一安装支架4的一者设置于所述第一端,所述驱动电机31和所述第一安装支架4中的另一者设置于所述第二端。这样,能够增大待标定传感器10的标定量程,同时利于零部件的合理布置。这里,滑轨21的第一端和第二端中的一者可以固定连于第一安装支架4,本公开对此不作限制。
以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
- 传感器标定方法和传感器标定装置
- 溶解氧传感器标定装置及溶解氧传感器标定方法