用于卷筒类物料的机械手
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及卷烟工业领域,尤其涉及一种用于卷筒类物料的机械手。
背景技术
条烟和包烟外侧的塑料透明纸为卷筒类物料,需要将库位的卷筒类物料转移至上料工位,在上料过程中需要使用夹持类设备将物料夹紧翻转套在转轴上,现有的夹持类设备仅是从卷筒类物料的两侧进行夹持,容易造成物料挤压变形,同时存在夹持不稳定的情况,因此,如何克服上述存在的技术问题和缺陷成为重点需要解决的问题。
发明内容
鉴于上述,本发明的目的是提供一种用于卷筒类物料的机械手,主要解决现有夹持设备夹持卷筒类物料稳定性及效果不佳的问题。
本发明采用的技术方案如下:
本发明提供了一种用于卷筒类物料的机械手,其中包括:
支撑架,所述支撑架开设有用于放置卷筒类物料的中心孔;其中,所述支撑架分为上下两层,两层支撑架通过固定轴连接;
在两层所述支撑架之间还设有圆环状的联动机构以及若干个机械臂,所述机械臂活动套接在所述固定轴的外部;
所述联动机构分为上下两层,两层所述联动机构之间通过滑动杆连接;
各所述机械臂的本体靠近卷筒类物料的一端固定连接有爪部,所述机械臂远离所述爪部的一端延伸设有限位长槽,所述滑动杆卡接在所述限位长槽的内部;
所述支撑架上固定安装有驱动装置,所述驱动装置的输出轴上固定套接有连接杆,所述连接杆远离驱动装置的一端铰接有传动杆的一端,所述传动杆的另一端与所述联动机构铰接。
在其中至少一种可能的实现方式中,所述爪部朝向卷筒类物料的侧面设有与用于与卷筒类物料相接触的防滑层。
在其中至少一种可能的实现方式中,所述机械臂及所述爪部相对于所述中心孔的中心对称分布。
在其中至少一种可能的实现方式中,所述机械臂及其所述爪部的数量至少为三个。
在其中至少一种可能的实现方式中,所述连接杆与所述传动杆之间形成V字形结构。
在其中至少一种可能的实现方式中,所述连接杆及所述传动杆,与两层所述联动机构之间的空间等高。
在其中至少一种可能的实现方式中,所述机械臂延伸出的限位长槽与机械臂的本体形成预设角度,所述预设角度与联动机构的旋转方向相适配。
在其中至少一种可能的实现方式中,下层的所述联动机构固定连接有限位块,所述限位块的底部卡接有环形导轨,且所述环形导轨(12)安装在下层的支撑架上。
在其中至少一种可能的实现方式中,所述驱动装置包括伺服电机。
本发明的构思在于通过由驱动装置驱动的联动机构与机械臂延伸段的限位长槽相互配合,联动周向设置的多点式夹紧结构,即若干个机械臂及其爪部同步地从多个角度对卷筒类物料进行夹紧,使位于中心的卷筒类物料受力更加均衡,夹持效果也更加牢固,有效提升了卷筒类物料夹持过程中的稳定性。
附图说明
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步描述,其中:
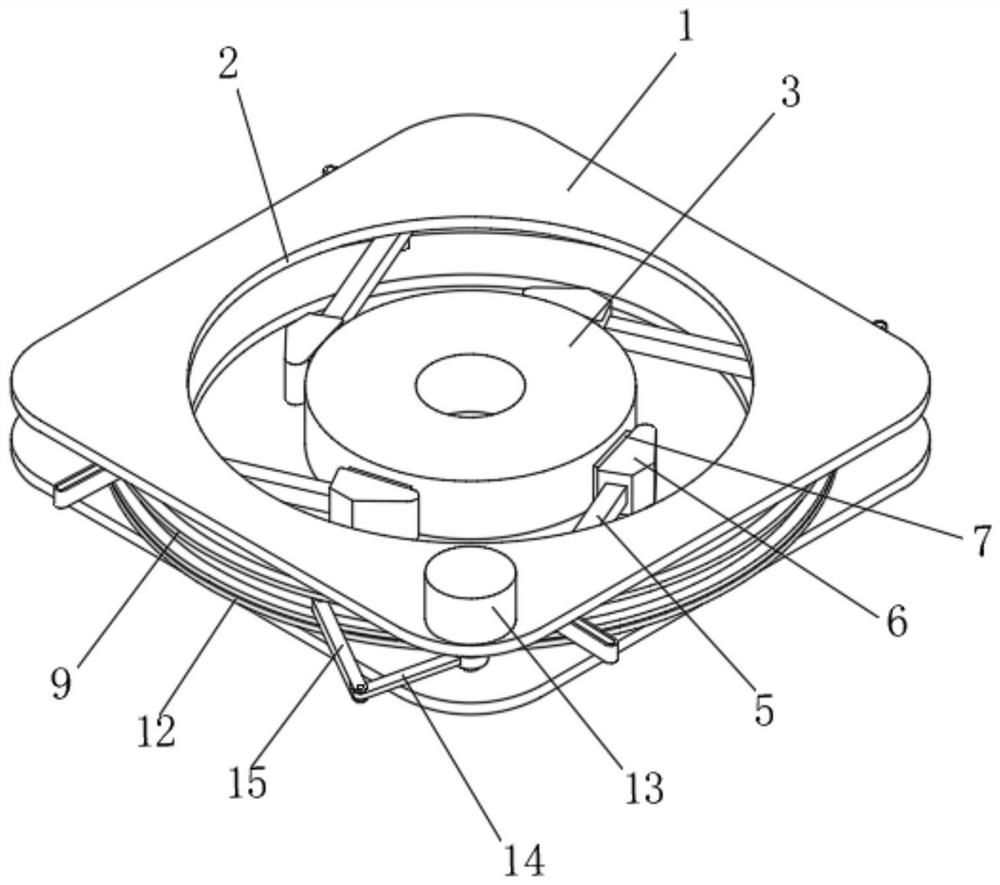
图1为本发明实施例提供的用于卷筒类物料的机械手的结构示意图;
图2为本发明实施例提供的机械手的内部结构示意图(去除上层的支撑架);
图3为本发明实施例提供的联动机构的结构示意图。
具体实施方式
下面详细描述本发明的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。
如图1~3所示,本发明提供一种用于卷筒类物料的机械手,包括支撑架1,所述支撑架1开设有用于放置卷筒类物料3的中心孔2,并且所述支撑架1分为上下两层,两层支撑架1通过设置在空间支撑架边缘处的固定轴4连接;在两层支撑架1之间还设有圆环状的联动机构9以及若干个机械臂5,所述机械臂5活动套接在所述固定轴4的外部。
所述机械臂5靠近卷筒类物料3的一端固定连接有爪部6,在实际操作中,所述爪部6(连同其机械臂5)优选相对于所述中心孔2中心对称分布,具体来说,所述爪部6的数量(连同其机械臂5的数量)可以至少为三个(如果是三个,三者之间呈120°),例如图中所示采用至少四个爪部6(连同其机械臂5,四者之间呈90°),通过采用该周向多点式夹紧结构设计,能够利用爪部6从多个角度位置对中心的卷筒类物料3进行夹紧,使卷筒类物料3受力更加的均衡,避免卷筒类物料3被挤压变形,同时使得夹持效果更加牢固。
进一步地,爪部6朝向卷筒类物料3的侧面还可以设有与卷筒类物料3相接触的防滑层7,通过在爪部6的侧面设置防滑层7,能够增加爪部6与卷筒类物料3之间的摩擦力,防止卷筒类物料3在夹持的过程中滑动脱落,提高了卷筒类物料3夹持过程中的稳定性。
接续前文,所述联动机构9分为上下两层,两层所述联动机构9之间通过滑动杆10连接在一起,且所述机械臂5远离所述爪部6的一端延伸设有限位长槽8,所述滑动杆10卡接在所述限位长槽8的内部。
所述支撑架1上固定安装有驱动装置13(优选但不限于采用伺服电机),所述驱动装置13的输出轴上固定套接有连接杆14,所述连接杆14远离驱动装置13的一端铰接有传动杆15,所述传动杆15的另一端则与所述联动机构9铰接在一起。在实际操作中,所述连接杆14与所述传动杆15之间可形成V字形结构,并且为了在确保稳定性的同时避免运动干涉,所述连接杆14及所述传动杆15与两层所述联动机构9之间的空间等高。
这里还需说明的是,本发明的主要构思是利用联动机构9的旋转,同步带动机械臂5作出夹紧(松弛)动作,因而前文提及的机械臂5延伸段的限位长槽8可与机械臂5的本体段形成一定角度,而该角度的设置则与驱动装置13的输出轴的转动方向(连同被驱动的联动机构9的旋转方向)相互配合,例如附图中示出了联动机构9逆时针旋转时的该角度设置参考。
基于前文实施例及其优选方案,此处提供一种结合图示的该机械手的使用方式参考:可先将支撑架1内部的中心孔2套在卷筒类物料3的外部,然后启动驱动装置13带动连接杆14转动,使传动杆15拉动联动机构9作出逆时针转动,再由联动机构9通过限位长槽8带动机械臂5逆时针旋转、前伸,使爪部6夹紧卷筒类物料3,可见,该机械手替代了人手,在完成上述夹持操作后,操作人员就可以通过移动前述支撑架1搬运卷筒类物料3了,由上也即是说,本发明只需要通过一个驱动装置13,便可以实现多个爪部6的多点式的抱紧操作,在有效节省成本的同时,通过联动机构9及限位长槽8的配合形成多机械臂联动,使爪部6能够同步地对卷筒类物料3进行夹持操作。
为了进一步确保所述联动机构9的旋转稳定性,结合附图所示,所述联动机构9的下层可以固定连接有限位块11(结合附图,可以理解为优选环状的限位块11),限位块11的底部则卡接有环形导轨12,环形导轨12固定安装在下层的支撑架1的顶部。通过在联动机构9的底部设置限位块11及其导轨12对联动机构9的运动起到导向、限位的作用,由此便可以提升联动机构9在运动时的稳定性,再配合上下两层支撑架1,使得联动机构9只能够进行旋转运动,避免联动机构9发生偏移影响爪部6的同步运作。
综上所述,本发明的构思在于通过由驱动装置驱动的联动机构与机械臂延伸段的限位长槽相互配合,联动周向设置的多点式夹紧结构,即若干个机械臂及其爪部同步地从多个角度对卷筒类物料进行夹紧,使位于中心的卷筒类物料受力更加均衡,夹持效果也更加牢固,有效提升了卷筒类物料夹持过程中的稳定性。
以上依据图式所示的实施例详细说明了本发明的构造、特征及作用效果,但以上仅为本发明的较佳实施例,需要言明的是,上述实施例及其优选方式所涉及的技术特征,本领域技术人员可以在不脱离、不改变本发明的设计思路以及技术效果的前提下,合理地组合搭配成多种等效方案;因此,本发明不以图面所示限定实施范围,凡是依照本发明的构想所作的改变,或修改为等同变化的等效实施例,仍未超出说明书与图示所涵盖的精神时,均应在本发明的保护范围内。
- 用于卷筒类物料的机械手
- 应用于卷筒类物料安装架的物料夹持设备