一种跟车系留无人机避障系统
文献发布时间:2023-06-19 11:37:30
技术领域
本发明属于无人机技术领域,尤其涉及一种跟车系留无人机避障系统。
背景技术
系留无人机,又称系留式无人机,为多旋翼无人机的一种特殊形式,使用通过系留线缆传输的地面电源作为动力来源,代替传统的锂电池,最主要的特点是长时间的滞空悬停能力。系留无人机由地面高压直流稳压系统、放线器、同步绕线轮、系留电缆、空中稳压模块和备用电池组成,高压直流稳压系统和同步绕线轮安装在放线器上,系留电缆与稳压模块和备用电池连接。
但是,现有的跟车系留无人机没有考虑避障功能,在遇到低空或高空障碍物时可能会发生事故,导致无人机或系留线缆的损坏。同时,在车辆转弯(航向发生变化)情况下,无人机自身航向无法跟随车辆航向,在经过多次转弯后,线缆出现打结现象,影响使用安全发明内容。
发明内容
本发明提供一种跟车系留无人机避障系统,旨在解决背景技术中所提及的问题。
本发明是这样实现的,一种跟车系留无人机避障系统,包括系留无人机和运输车,所述系留无人机和所述运输车之间通过系留线缆相连接;
所述运输车上设置有车载毫米波雷达和基站,所述系留无人机上设置有机载毫米波雷达,所述车载毫米波雷达和所述机载毫米波雷达用于实时监测前方障碍物,所述系留无人机上设置有脱钩装置;
所述系留线缆一端与所述基站连接,另一端与所述脱钩装置连接,所述脱钩装置用于当所述系留线缆被缠住时,可解除所述系留线缆与所述系留无人机之间的连接关系。
优选的,所述脱钩装置包括安装在所述系留无人机上的舵机安装座、安装在所述舵机安装座上的舵机以及两个相互转动连接的舵机连杆,其中一个所述舵机连杆与所述舵机连接,另一个所述舵机连杆的端部设置有插销,所述舵机安装座上还设置有与所述系留线缆连接的脱离部件,所述脱离部件可在与所述插销接触的定位作用下固定在所述舵机安装座上,当所述插销离开所述脱离部件时,使得所述脱离部件与所述舵机安装座相分开。
优选的,所述舵机安装座上开设有安装所述脱离部件的容纳槽,所述舵机安装座上还开设有与所述容纳槽连通的通孔,所述插销可贯穿所述通孔与所述脱离部件相接触。
优选的,所述脱离部件是由相互连接的下连接器和上连接器组成的,所述下连接器上沿水平方向开设有依次贯通所述下连接器和所述上连接器的定位孔,所述插销可贯穿插入至所述定位孔内。
优选的,还包括伴飞模式控制系统,其用于所述系留无人机的位置、速度、角度和角速度的控制。
优选的,所述伴飞模式控制系统实现方法包括以下步骤:
S1、所述系留无人机上板卡通过电台接收所述基站的差分数据,从而得到所述系留无人机与所述基站的相对位置反馈值;
S2、根据所述系留无人机的相对位置目标值经过位置控制器得到相对速度目标值;
S3、通过所述系留无人机上板卡获得所述系留无人机的绝对速度反馈,经过速度控制器得到角度目标值;
S4、根据所述系留无人机上陀螺仪传感器得到所述系留无人机的角度反馈,经过角度控制器得到所述系留无人机的角速度目标值;
S5、由陀螺仪传感器得到的角速度反馈经过角速度控制器得到电机控制量控制电机转速。
优选的,所述伴飞模式控制系统中还包括航向控制系统,所述航向控制系统实现方法包括以下步骤:
S1、将所述基站发送的所述运输车绝对航向设为飞机的航向目标值;
S2、根据所述系留无人机航向的反馈值经过角度控制器得到角速度环的目标值;
S3、根据陀螺仪传感器得到所述系留无人机的角速度反馈值,经过角速度目标值调节电机转速,进而控制所述系留无人机航向与所述运输车航向保持一致。
与现有技术相比,本发明的有益效果是:本发明一种跟车系留无人机避障系统保证了系留无人机跟车飞行时的安全性,系留无人机实时获取车辆航向信息并调节自身航向,避免线缆打结,通过设置脱钩装置,当系留线缆意外被障碍物缠住时,可以使用脱钩装置使系留线缆断开,从而控制无人机安全着陆。
附图说明
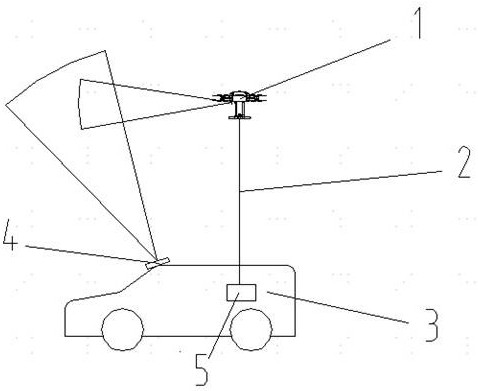
图1为本发明一种跟车系留无人机避障系统的结构示意图;
图2为本发明一种跟车系留无人机避障系统中系留无人机的结构示意图;
图3为本发明一种跟车系留无人机避障系统中脱钩装置的结构示意图;
图4为本发明一种跟车系留无人机避障系统中伴飞模式控制系统的流程示意图;
图5为本发明一种跟车系留无人机避障系统中伴飞模式控制系统中航向控制系统的流程示意图;
图中:1-系留无人机、2-系留线缆、3-运输车、4-车载毫米波雷达、5-基站、6-脱钩装置、601-舵机、602-舵机连杆、603-舵机安装座、604-插销、605-下连接器、606-上连接器。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
请参阅图1-5,本发明提供一种技术方案:一种跟车系留无人机避障系统,包括系留无人机1和运输车3,系留无人机1和运输车3之间通过系留线缆2相连接;
运输车3上设置有车载毫米波雷达4和基站5,系留无人机1上设置有机载毫米波雷达7,车载毫米波雷达4和机载毫米波雷达7用于实时监测前方障碍物,系留无人机1上设置有脱钩装置6;
系留线缆2一端与基站5连接,另一端与脱钩装置6连接,脱钩装置6用于当系留线缆2被缠住时,可解除系留线缆2与系留无人机1之间的连接关系。
在本实施方式中,在运输车3行驶过程中,系留无人机1跟随运输车3飞行过程中,车载毫米波雷达4和机载毫米波雷达7用于实时监测前方障碍物,当障碍物高度H减去系留无人机1飞行高度h大于3m,则无需躲避障碍;当障碍物高度H小于系留无人机1飞行高度h或超过不足3m时,控制系留无人机1降低飞行高度躲避障碍;当障碍物高度过低,使得系留无人机1飞行靠近运输车3时,控制系留无人机1降落,等通过障碍物后再控制系留无人机1起飞,从而系留无人机1能实时监测前方障碍物,能及时避障,保证飞行安全。当系留线缆2意外被外部障碍物缠住时,停下运输车,脱钩装置6可以将系留线缆2与系留无人机1之间的连接关系解除,从而系留线缆2与无人机1脱离连接,从而可以控制系留无人机1安全降落。需要说明的是,还可以在系留线缆2加上预紧力,使系留线缆2在无人机飞行过程中保持张紧状态,避免因系留线缆2过松而引发的故障。
进一步的,脱钩装置6包括安装在系留无人机1上的舵机安装座603、安装在舵机安装座603上的舵机601以及两个相互转动连接的舵机连杆602,其中一个舵机连杆602与舵机601连接,另一个舵机连杆602的端部设置有插销604,舵机安装座603上还设置有与系留线缆2连接的脱离部件,脱离部件可在与插销604接触的定位作用下固定在舵机安装座603上,当插销604离开脱离部件时,使得脱离部件与舵机安装座603相分开。
在本实施方式中,舵机601可以控制相互转动连接的舵机连杆602发生运动,从而使得插销604可以对脱离部件进行定位,插销604随舵机连杆602的运动接触或离开脱离部件,当插销604离开脱离部件时,脱离部件也随之离开舵机安装座603,从而脱离部件带着系留线缆2离开系留无人机1。
进一步的,舵机安装座603上开设有安装脱离部件的容纳槽,舵机安装座603上还开设有与容纳槽连通的通孔,插销604可贯穿通孔与脱离部件相接触。
在本实施方式中,脱离部件收纳在舵机安装座603上的容纳槽内,插销604穿过通孔与脱离部件相接触,从而对脱离部件进行定位,插销604可以是对脱离部件外表面抵接定位,也可以是贯穿脱离部件进行定位。
进一步的,脱离部件是由相互连接的下连接器605和上连接器606组成的,下连接器605上沿水平方向开设有依次贯通下连接器605和上连接器606的定位孔,插销604可贯穿插入至定位孔内。
在本实施方式中,当插销604穿过定位孔,依次连接下连接器605和上连接器606,当插销604离开定位孔时,下连接器605和上连接器606离开容纳槽,从而带着系留线缆2脱离系留无人机1。
进一步的,还包括伴飞模式控制系统,其用于系留无人机1的位置、速度、角度和角速度的控制。
在本实施方式中,飞模式控制系统可以是现有技术来控制无人机1的位置、速度、角度和角速度,也可以是下述的系统。
进一步的,伴飞模式控制系统实现方法包括以下步骤:
S1、系留无人机1上板卡通过电台接收基站5的差分数据,从而得到系留无人机1与基站5的相对位置反馈值;
S2、根据系留无人机1的相对位置目标值经过位置控制器得到相对速度目标值;
S3、通过系留无人机1上板卡获得系留无人机1的绝对速度反馈,经过速度控制器得到角度目标值;
S4、根据系留无人机1上陀螺仪传感器得到系留无人机1的角度反馈,经过角度控制器得到系留无人机1的角速度目标值;
S5、由陀螺仪传感器得到的角速度反馈经过角速度控制器得到电机控制量控制电机转速。
进一步的,伴飞模式控制系统中还包括航向控制系统,航向控制系统实现方法包括以下步骤:
S1、将基站5发送的运输车3绝对航向设为飞机的航向目标值;
S2、根据系留无人机1航向的反馈值经过角度控制器得到角速度环的目标值;
S3、根据陀螺仪传感器得到系留无人机1的角速度反馈值,经过角速度目标值调节电机转速,进而控制系留无人机1航向与运输车3航向保持一致。
本发明的工作原理及使用流程:本发明安装好过后,在运输车3行驶过程中,系留无人机1跟随运输车3飞行过程中,车载毫米波雷达4和机载毫米波雷达7用于实时监测前方障碍物,当障碍物高度H减去系留无人机1飞行高度h大于3m,则无需躲避障碍;当障碍物高度H小于系留无人机1飞行高度h或超过不足3m时,控制系留无人机1降低飞行高度躲避障碍;当障碍物高度过低,使得系留无人机1飞行靠近运输车3时,控制系留无人机1降落,等通过障碍物后再控制系留无人机1起飞,从而系留无人机1能实时监测前方障碍物,能及时避障,保证飞行安全。当系留线缆2意外被外部障碍物缠住时,停下运输车,脱钩装置6可以将系留线缆2与系留无人机1之间的连接关系解除,从而系留线缆2与无人机1脱离连接,可以控制系留无人机1安全降落。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种自动避障的系留无人机跟车系统
- 一种跟车系留无人机避障系统