进行航空器控制的控制装置、及控制方法
文献发布时间:2023-06-19 11:39:06
技术领域
本发明涉及由进行航空器控制的系统执行的控制方法等技术领域,该航空器具备能够在飞行中测定地表温度的传感器。
背景技术
近年来,正研究通过能够无人飞行的航空器将货物等搬运对象搬运到目的地并加以交接。例如,专利文献1中揭示如下方法,即,当搬运装置(航空器)到达目的地时进行盘旋,向下方卷出主金属丝直到搬运的货物着落到地面上,并在货物着落后将货物与搬运装置切断。
背景技术文献
专利文献
专利文献1:日本专利特开2017-87898号公报
发明内容
[发明所要解决的问题]
然而,在供搬运对象从航空器脱离的预定区域的地表温度较高的情况下,有可能对搬运对象造成不良影响。此外,不管航空器是否搬运搬运对象,在航空器着陆到地表温度较高的区域的情况下,均有可能对航空器自身造成不良影响。
由此,提供一种能够防止因地表温度而对搬运对象或航空器造成不良影响的控制装置及控制方法。
[解决问题的技术手段]
为了解决上述问题,权利要求1所述的发明是一种控制装置,进行航空器控制,该航空器搬运搬运对象,且具备能够在飞行中测定地表温度的传感器,该控制装置的特征在于具备:获取部,获取由所述传感器测定的地表温度、且供所述搬运对象脱离的预定区域的地表温度;及控制部,根据所述区域的地表温度,进行与所述搬运对象的脱离相关的控制。由此,可防止因供搬运对象脱离的预定区域的地表温度而对搬运对象造成不良影响。
权利要求2所述的发明是根据权利要求1所述的控制装置,其特征在于:所述控制部在所述区域的地表温度小于阈值的情况下,在使所述航空器盘旋的状态下使所述搬运对象下降以使所述搬运对象脱离。由此,可在地表温度小于阈值的区域,使搬运对象更快速地脱离。
权利要求3所述的发明是根据权利要求1所述的控制装置,其特征在于:所述控制部在所述区域的地表温度小于阈值的情况下,使所述航空器着陆以使所述搬运对象脱离。由此,可在地表温度小于阈值的区域,使搬运对象更恰当地脱离。
权利要求4所述的发明是根据权利要求1或2所述的控制装置,其特征在于:所述控制部在所述区域的地表温度为阈值以上的情况下,进行用以使所述地表温度降低的控制,在确认到所述地表温度小于阈值之后,在使所述航空器盘旋的状态下使所述搬运对象下降以使所述搬运对象脱离。由此,即便供搬运对象脱离的预定区域的地表温度为阈值以上,也可以在使该地表温度降低到小于阈值之后,使搬运对象更快速地脱离。
权利要求5所述的发明是根据权利要求1或3所述的控制装置,其特征在于:所述控制部在所述区域的地表温度为阈值以上的情况下,进行用以使所述地表温度降低的控制,在确认到所述地表温度小于阈值之后,使所述航空器着陆以使所述搬运对象脱离。由此,即便供搬运对象脱离的预定区域的地表温度为阈值以上,也可以在使该地表温度降低到小于阈值之后,使搬运对象更恰当地脱离。
权利要求6所述的发明是根据权利要求1或2所述的控制装置,其特征在于:所述控制部在所述区域的地表温度为阈值以上的情况下,当确认到在所述区域中已在要脱离的所述搬运对象的接收侧完成接收准备后,在使所述航空器盘旋的状态下使所述搬运对象下降以使所述搬运对象脱离。由此,即便供搬运对象脱离的预定区域的地表温度为阈值以上,也可以在该区域使搬运对象更快速地脱离并交递给接收侧。
权利要求7所述的发明是根据权利要求1或3所述的控制装置,其特征在于:所述控制部在所述区域的地表温度为阈值以上的情况下,当确认到在所述区域中已在要脱离的所述搬运对象的接收侧完成接收准备后,使所述航空器着陆以使所述搬运对象脱离。由此,即便供搬运对象脱离的预定区域的地表温度为阈值以上,也可以在该区域中使搬运对象更恰当地脱离并交递给接收侧。
权利要求8所述的发明是根据权利要求6或7所述的控制装置,其特征在于:所述控制部通过向所述搬运对象的接收侧进行确认通知,并从所述接收侧接收表示准备完成的应答,而确认已在所述接收侧完成接收准备。由此,可更切实地确认已在接收侧完成搬运对象的接收准备。
权利要求9所述的发明是根据权利要求6或7所述的控制装置,其特征在于:所述控制部通过根据由所述航空器具备的相机拍摄的图像来识别所述搬运对象的接收侧,而确认已在所述接收侧完成接收准备。由此,可更快速地确认已在接收侧完成搬运对象的接收准备。
权利要求10所述的发明是根据权利要求1所述的控制装置,其特征在于:所述控制部在所述区域的地表温度为阈值以上的情况下,使所述航空器向与所述区域不同的区域移动以使所述搬运对象脱离。由此,即便供搬运对象脱离的预定区域的地表温度为阈值以上,也可以使所述航空器向不同的区域移动来实现恰当应对。
权利要求11所述的发明是根据权利要求1至5中任一项所述的控制装置,其特征在于还具备选定部,该选定部根据所述区域内的多个地点的地表温度的分布,选定所述地表温度小于阈值的地点作为供所述搬运对象脱离的地点。由此,可使搬运对象在与供搬运对象脱离的预定区域的地表温度对应的恰当地点脱离。
权利要求12所述的发明是根据权利要求2至11中任一项所述的控制装置,其特征在于:根据所述搬运对象的种类来设定所述阈值。由此,可根据搬运对象的种类与供该搬运对象脱离的预定区域的地表温度来实现恰当应对。
权利要求13所述的发明是根据权利要求12所述的控制装置,其特征在于:所述航空器搬运不同种类的多个搬运对象,所述选定部根据所述区域内的多个地点的地表温度的分布,针对每一所述搬运对象,选定所述地表温度小于阈值的地点作为供所述搬运对象脱离的地点。由此,可使搬运对象在与多个搬运对象各自的种类和供各搬运对象脱离的预定区域的地表温度对应的恰当地点脱离。
权利要求14所述的发明是一种控制方法,由进行航空器控制的系统执行,该航空器搬运搬运对象,且具备能够在飞行中测定地表温度的传感器,该控制方法的特征在于具备:获取由所述传感器测定的地表温度、且供所述搬运对象脱离的区域的地表温度的步骤;及根据所述区域的地表温度,进行与所述搬运对象的脱离相关的控制的步骤。
权利要求15所述的发明是一种控制装置,进行航空器控制,该航空器具备能够在飞行中测定地表温度的传感器,该控制装置的特征在于具备:获取部,获取由所述传感器测定的地表温度、且所述航空器着陆的预定区域的地表温度;及控制部,根据所述区域的地表温度,进行与所述航空器的着陆相关的控制。由此,可防止因航空器着陆的预定区域的地表温度而对航空器造成不良影响。
[发明的效果]
根据本发明,可防止因供搬运对象脱离的预定区域的地表温度而对搬运对象或航空器造成不良影响。
附图说明
图1是表示飞行系统S的概要构成例的图。
图2是表示UAV1的概要构成例的图。
图3是表示控制服务器CS的概要构成例的图。
图4是表示控制部23的功能方块例的图。
图5是表示脱离预定区域内的多个地点的地表温度的分布的图。
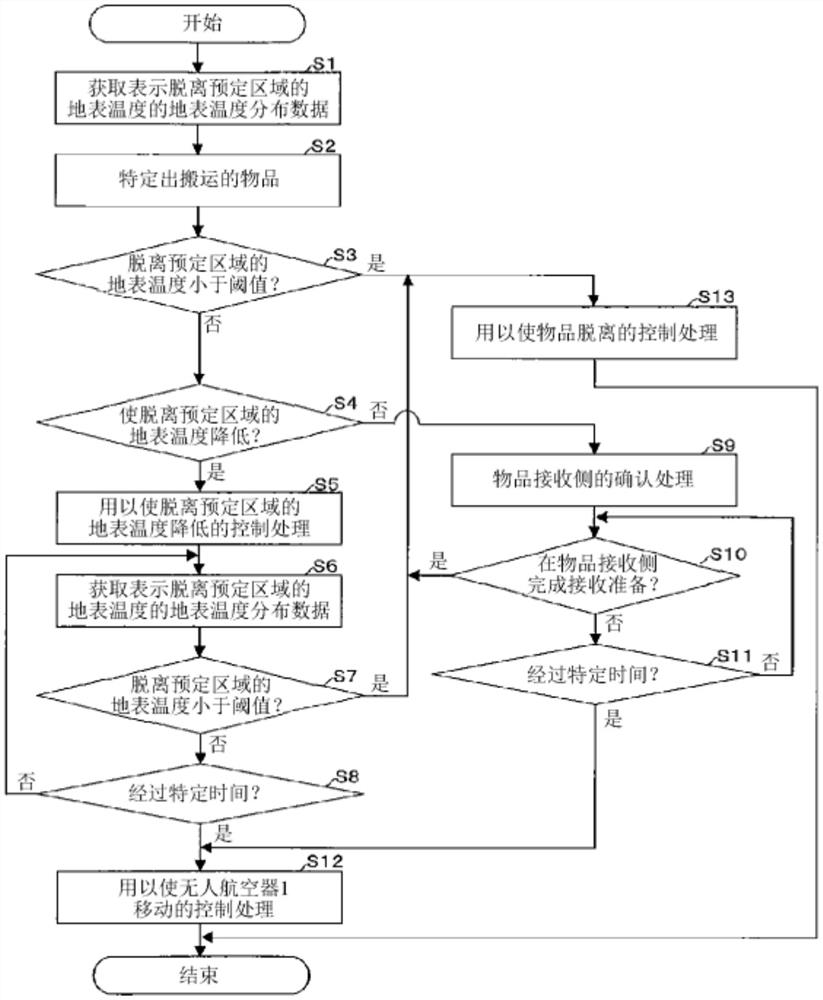
图6是表示实施例1中由控制服务器CS的控制部23执行的处理的一例的流程图。
图7是表示实施例2中由控制服务器CS的控制部23执行的处理的一例的流程图。
具体实施方式
以下,参照附图对本发明的一实施方式进行说明。另外,以下实施方式是将本发明应用于飞行系统的情况的实施方式。
[
首先,参照图1说明使能够无人飞行的航空器为了特定目的而飞行的飞行系统S的构成及动作概要。作为特定目的例,列举例如搬运、测量、摄影、检查、监控等,以下实施方式中,列举使无人航空器飞行以搬运搬运对象的情况为例。图1是表示飞行系统S的概要构成例的图。如图1所示,飞行系统S包含在大气中(空中)飞行的无人航空器(以下,称为“UAV(Unmanned Aerial Vehicle)”)1、航运管理系统(以下,称为“UTMS(UAV TrafficManagement System)”)2、及航空站管理系统(以下,称为“PMS(Port ManagementSystem)”)3而构成。UAV1、UTMS2、及PMS3能够经由通信网络NW相互通信。通信网络NW包含例如因特网、移动通信网络及其无线基站等。另外,图1的例中,示出1个UAV1,但实际可存在多个UAV1。UTMS2与PMS3也可以构成1个管理系统。
UAV1能够按照操作员的远距离操纵从地上飞行、或自主飞行以将搬运对象向特定区域搬运。此处,特定区域是指例如具有UAV1的平面尺寸以上的宽度(例如,几十cm
UTMS2是具备包含控制服务器CS的1个以上的服务器等而构成。控制服务器CS为控制装置的一例。UTMS2管理UAV1的航运。UAV1的航运管理中包含UAV1的航运计划管理、UAV1的飞行状况管理、及UAV1的控制。UAV1的航运计划是指,包含从UAV1的出发地点(飞行开始地点)到脱离预定区域(也有包含航空站的情况)为止的飞行路径(预定路径)等的飞行计划。飞行路径例如用其路径上的纬度及经度表示,也可以包含飞行高度。UAV1的飞行状况管理是根据UAV1的航空器信息来进行。UAV1的航空器信息中至少包含UAV1的位置信息。UAV1的位置信息表示UAV1的当前位置。UAV1的当前位置是指飞行中的UAV1的飞行位置。UAV1的航空器信息中也可以包含UAV1的速度信息等。速度信息表示UAV1的飞行速度。
PMS3由1个或多个服务器等构成。PMS3例如管理设置在脱离预定区域内的航空站。航空站管理是根据航空站位置信息及航空站预约信息等来进行。此处,航空站位置信息表示航空站的设置位置。航空站的预约信息中包含预约航空站的UAV1的机体ID(identification,标识)、及预定到达时刻信息等。UAV1的机体ID是辨识UAV1的辨识信息。航空站用于交接由UAV1搬运(例如配送)的物品。例如,通过使物品从着陆到航空站中的UAV1脱离而将该物品交递给接收侧(例如,人或UGV(Unmanned Ground Vehicle,无人地面车辆))。或者,通过使物品在利用卷盘或绞车等从盘旋在航空站上空的UAV1下降并到达地面时,或到达距地面数m高度时脱离,而将该物品交递给接收侧。另外,也存在如下情况,即,通过从盘旋在航空站上空的UAV1投下物品(即,在上空脱离),而将该物品交递给接收侧。
此外,存在如下情况,即,在航空站中从UAV1脱离的物品并不是直接交递给该物品接收侧,而是在航空站上放置例如几十分钟左右。航空站一般设置在平坦且较硬的从上空易于观察的地面(例如,混凝土地面)上,因此容易受大量日光直射,其表面温度容易变高(例如,也有烈日下航空站表面温度超过60℃的情况)。由此,当将物品放置到航空站上时,根据其种类(尤其是冷藏或冷冻食品、生鲜食品等),有可能对物品造成不良影响,例如导致物品品质急剧下降等。此情况虽然也取决于地面属性(例如,混凝土、土、草地等),但在将物品放置到除航空站以外的场所的情况下也相同。本实施方式中,根据物品的脱离预定区域的地表温度来进行与物品脱离相关的控制。与物品脱离相关的控制可由UAV1进行,也可以由控制服务器CS进行,还可以由UAV1与控制服务器CS合作进行。另外,也有航空站具备对航空站上进行冷却的冷却装置的情况。该情况下,冷却装置以根据来自UAV1或服务器CS的驱动控制指令而驱动的方式构成即可。航空站是否具备冷却装置的信息由PMS3管理即可。
[
接下来,参照图2对UAV1的构成及功能概要进行说明。图2是表示UAV1的概要构成例的图。如图2所示,UAV1具备驱动部11、测位部12、无线通信部13、摄像部14、温度传感器15、及控制部16等。控制部16为控制装置的一例。另外,虽未图示,UAV1具备作为水平旋转翼的转子(螺旋桨)、各种传感器、能够保持搬运的物品并能够使之脱离的物品保持机构、及向UAV1的各部分供给电力的电池等。物品保持机构构成为能够保持多个物品的各者并能够使之脱离。物品保持机构能够由控制部16控制而使物品脱离(例如通过电动机驱动而使固持物品的臂部张开等)。此外,UAV1也可以包含能够卷出金属丝的卷盘或绞车,在金属丝的前端连接物品。该情况下,物品保持机构可以是存在于连接物品与金属丝之间的部分而与物品一起下降的机构,也可以是不下降而与金属丝一起脱离物品(例如切断金属丝)的机构。此外,UAV1也可以具备用以投下(喷洒)供冷却脱离预定区域内的地面的液体(例如,水)的喷洒机构。喷洒机构具备蓄水的储箱、及投下水的喷洒器等。此外,用于UAV1的飞行控制的各种传感器包含气压传感器、3轴加速度传感器、及地磁传感器等。由各种传感器检测出的检测信息被输出到控制部16。
驱动部11具备电动机及旋转轴等。驱动部11通过根据从控制部16输出的控制信号来驱动的电动机及旋转轴等而使多个转子旋转。测位部12具备电波接收器及高度传感器等。测位部12例如通过电波接收器接收从GNSS(Global Navigation Satellite System,全球导航卫星系统)的卫星发送的电波,并根据该电波来检测UAV1的水平方向的当前位置(纬度及经度)。UAV1的当前位置为飞行中的UAV1的飞行位置。另外,UAV1的水平方向的当前位置也可以根据由摄像部14拍摄的图像数据或从上述无线基站发送的电波来加以修正。进而,测位部12也可以通过高度传感器检测UAV1的垂直方向的当前位置(高度)。表示由测位部12检测出的当前位置的位置信息被输出到控制部16。
无线通信部13负责经由通信网络NW进行的通信的控制。摄像部14具备相机等。相机用于UAV1的飞行控制。摄像部14连续拍摄处在相机视角下的范围内的真实空间。由摄像部14拍摄的图像数据被输出到控制部16。温度传感器15为能够在UAV1的飞行中从上空测定地表温度的传感器,例如具备红外线热成像仪。表示由温度传感器15测定的地表温度的地表温度分布数据被输出到控制部16。
控制部16具备作为处理器的CPU(Central Processing Unit,中央处理器)、ROM(Read Only Memory,只读存储器)、RAM(Random Access Memory,随机存取存储器)、及非易失性存储器等。控制部16例如根据ROM或非易失性存储器中存储的控制程序来执行UAV1的各种控制。各种控制包含起飞控制、飞行控制、及着陆控制。飞行控制及着陆控制中,使用由测位部12获取的位置信息、由摄像部14获取的图像数据、由各种传感器获取的检测信息、及表示飞行计划的飞行计划信息,进行转子的转速控制、UAV1的位置、姿态及行进方向控制。此处,例如从GCS或UTMS2获取飞行计划信息。飞行计划信息包含脱离预定区域的位置信息。控制部16可根据脱离预定区域的位置信息来远距离操纵UAV1使之向该脱离预定区域飞行或使之自主飞行。另外,UAV1的自主飞行并不限定于基于该UAV1具备的控制部16进行飞行控制而实现的自主飞行,该UAV1的自主飞行例如也包含基于进行飞行系统S整体的飞行控制而实现的自主飞行。
进而,控制部16例如在到达脱离预定区域时,使温度传感器15测定脱离预定区域的地表温度,由温度传感器15获取该测定的脱离预定区域的地表温度(地表温度分布数据)。另外,在地表温度分布数据中,将脱离预定区域内的各地点的地表温度与该各地点的纬度及纬度建立对应即可。而且,控制部16根据脱离预定区域的地表温度来进行与物品脱离相关的控制,由此使与物品的脱离相关的后续处理不同。例如,在脱离预定区域的地表温度小于阈值的情况下,控制部16在使UAV1盘旋的状态下通过卷盘或绞车等使物品下降到该脱离预定区域内以使物品脱离。由此,在地表温度小于阈值的脱离预定区域中,可使物品更快速地脱离。此处,盘旋状态并不限定于UAV1在空中完全静止的状态,也可以发生UAV1少许移动(即,在水平方向、垂直方向、或斜向上移动)(即,UAV1只要不着陆而浮在空中即可)。或者,在脱离预定区域的地表温度小于阈值的情况下,控制部16也可以使UAV1着陆到脱离预定区域内以使物品脱离。由此,在地表温度小于阈值的脱离预定区域中,可使物品更恰当(安全)地脱离。另外,根据物品种类来设定阈值即可。
另一方面,在脱离预定区域的地表温度为阈值以上的情况下,控制部16也可以进行用以使该脱离预定区域的地表温度降低的控制,并确认该地表温度小于阈值。此处,作为使脱离预定区域的地表温度降低的控制,控制部16例如使UAV1的喷洒机构驱动而投下(喷洒)水。如果为物品在脱离预定区域内的航空站上脱离,或者UAV1着陆到该航空站上的情况,则在该航空站具备冷却装置的情况下,控制部16也可以通过对冷却装置发送驱动控制指令而使该冷却装置驱动来对该航空站进行冷却。而且,控制部16在确认到脱离预定区域的地表温度小于阈值后,在使UAV1盘旋的状态下使物品下降到该脱离预定区域内,或者使UAV1着陆以使物品脱离。由此,即便脱离预定区域的地表温度为阈值以上,也可以在使该地表温度降低到小于阈值后使物品脱离。
此外,在脱离预定区域的地表温度为阈值以上的情况下,控制部16也可以使UAV1向与该脱离预定区域不同的区域移动以使物品脱离。所述移动的目的也可以为用于如下等:(i)使物品在不同的区域(其它航空站等)脱离而将该物品交递给接收侧;(ii)着陆到不同区域并待机直到地表温度降低为止;(iii)放弃将物品交递给接收侧而在不同的区域(可以为出发地点,也可以为其它场所)回收物品。由此,即便脱离预定区域的地表温度为阈值以上,也可以使UAV1向不同的区域移动来谋求更恰当的应对。
此外,即便脱离预定区域的地表温度为阈值以上,控制部16也可以在确认到在该脱离预定区域中已在要脱离的物品的接收侧完成接收准备后,在使UAV1盘旋的状态下使UAV1下降,或者使UAV1着陆以使该物品脱离。由此,即便脱离预定区域的地表温度为阈值以上,也可以在该脱离预定区域中使物品脱离并将之交递给接收侧(即,将物品在不放置到地面上的情况下交接)。此处,例如通过控制部16根据由摄像部14拍摄的图像数据来识别物品接收侧而进行已在接收侧完成接收准备的确认。由此,可更快速地确认已在接收侧完成物品的接收准备。更具体而言,控制部16将预先登录的人脸图像数据与由摄像部14拍摄的人脸图像数据加以比对,在人脸一致度为阈值以上的情况下,识别(认证)物品接收侧。或者,控制部16将预先登录的UGV的标记图像数据与由摄像部14拍摄的UGV的标记(即,附在UGV表面上的标记)图像数据加以比对,在标记一致度为阈值以上的情况下,识别(认证)物品接收侧。
另外,脱离预定区域的地表温度是否小于阈值或是否为阈值以上的判定(确认)可由控制部16进行,也可以由控制服务器CS进行。在后者情况下,控制部16将表示脱离预定区域的地表温度的地表温度分布数据与UAV1的机体ID及航空器信息一起经由无线通信部13发送到控制服务器CS。然后,控制部16根据来自控制服务器CS或GCS的脱离控制指令,在使UAV1盘旋的状态下使物品下降,或者使UAV1着陆以使物品脱离。或者,控制部16也可以根据来自控制服务器CS或GCS的移动控制指令,而使UAV1向与该脱离预定区域不同的区域移动。
此外,脱离预定区域的地表温度的分布并不限定于固定。即,假定脱离预定区域内的某部分的地表温度、与该脱离预定区域内的其它部分的地表温度不同的情况。脱离预定区域越宽广,该情况越明显。因此,在脱离预定区域的地表温度的分布不固定的情况下,例如,判定脱离预定区域内的地表温度的最小值是否小于阈值即可。作为另一例,也可以根据脱离预定区域内的多个地点的地表温度分布,选定地表温度小于阈值的地点作为供物品脱离的地点(以下,称为“脱离地点”)。由此,可使物品在与脱离预定区域的地表温度对应的恰当的脱离地点脱离。
物品脱离地点的宽度例如为物品平面尺寸(换言之,物品接地面的面积)左右的宽度、或UAV1的平面尺寸以上的宽度即可。物品脱离地点的选定可由控制部16进行,也可以由控制服务器CS进行。在后者情况下,在来自控制服务器CS或GCS的脱离控制指令中示出物品脱离地点的位置信息。然后,控制部16根据该脱离控制指令,在使UAV1盘旋的状态下使物品下降到脱离控制指令所示出的脱离地点,或者使UAV1着陆到该脱离地点。由此,判定脱离预定区域的地表温度为阈值以上的频率降低,因此可降低UAV1或控制服务器CS的负载,此外,可降低UAV1的耗电量。
[
接下来,参照图3及图4对控制服务器CS的构成及功能概要进行说明。图3是表示控制服务器CS的概要构成例的图。如图3所示,控制服务器CS具备通信部21、存储部22、控制部23等。通信部21负责经由通信网络NW进行的通信的控制。存储部22例如具备硬盘驱动器等。存储部22中存储UAV1能够飞行的区域的地图数据。地图数据中包含UAV1能够飞行的区域中的各地点的位置信息(例如,纬度及经度)。
此外,存储部22中,按每一物品来区别存储物品管理信息。物品管理信息中,包含例如物品的物品ID、物品种类、物品的脱离预定区域的位置信息、搬运物品的UAV1的机体ID、及物品接收侧信息。此处,物品ID是辨识物品的辨识信息。物品接收侧信息包含有在脱离预定区域接收物品的用户的邮箱地址、该用户的用户ID等。用户ID是辨识用户的辨识信息。或者,物品接收侧信息包含用以对在脱离预定区域接收物品的UGV进行存取的通信用地址(例如,IP(Internet Protocol,网际协议)地址)、利用该UGV的用户的邮箱地址、该用户的用户ID等。物品接收侧信息也可以包含接收物品的用户的脸图像数据、或接收物品的UGV的标记图像数据。
控制部23具备处理器CPU、ROM、RAM、及非易失性存储器等。图4是表示控制部23中的功能方块例的图。控制部23例如根据ROM或非易失性存储器中存储的程序,如图4所示作为地表温度获取部23a、脱离地点选定部23b、及航空器控制部23c等发挥功能。地表温度获取部23a为获取部的一例。脱离地点选定部23b为选定部的一例。
地表温度获取部23a从该UAV1例如以特定时间间隔,获取由UAV1的温度传感器15测定的脱离预定区域的地表温度与UAV1的机体ID。脱离地点选定部23b根据脱离预定区域内的多个地点的地表温度分布,选定地表温度小于阈值的地点作为物品的脱离地点,并获取该脱离地点的位置信息。此处,根据物品种类来设定阈值即可。另外,在UAV1搬运不同种类的多个物品的情况下,地表温度获取部23a根据脱离预定区域内的多个地点的地表温度分布,针对各个物品来选定地表温度小于阈值(例如,根据物品种类来设定的阈值)的地点作为各个物品的脱离地点,并获取各个脱离地点的位置信息。由此,可使物品在与多个物品各自的种类及各物品的脱离预定区域的地表温度对应的恰当的脱离地点脱离。
图5是表示脱离预定区域内的多个地点的地表温度分布的图。图5的例中,示出有表面温度为13℃~17℃的局部区域Ar1、表面温度为18℃~22℃的局部区域Ar2、表面温度为23℃~27℃的局部区域Ar3、及表面温度为28℃~32℃的局部区域Ar4。例如,在根据物品种类来设定的阈值为18℃的情况下,选定地表温度小于阈值18℃的局部区域Ar1内的地点Px作为该物品的脱离地点。
航空器控制部23c通过根据脱离预定区域的地表温度来进行与物品脱离相关的控制,而使与物品的脱离相关的后续处理不同。例如,在脱离预定区域的地表温度小于阈值的情况下,航空器控制部23c将在使UAV1盘旋的状态下使物品下降到该脱离预定区域内的脱离控制指令发送到UAV1(或经由GCS发送到UAV1)以使物品脱离。或者,在脱离预定区域的地表温度小于阈值的情况下,航空器控制部23c将使UAV1着陆到脱离预定区域内的脱离控制指令发送到UAV1以使物品脱离。另外,在通过脱离地点选定部23b选定物品的脱离地点的情况下,航空器控制部23c将在使UAV1盘旋的状态下使物品下降到该脱离地点的脱离控制指令发送到UAV1,或者,将使UAV1着陆到该脱离地点的脱离控制指令发送到UAV1。
另一方面,在脱离预定区域的地表温度为阈值以上的情况下,航空器控制部23c也可以进行用以使该脱离预定区域的地表温度降低的控制,并确认该地表温度小于阈值。此处,作为用以使脱离预定区域的地表温度降低的控制,航空器控制部23c例如将使UAV1的喷洒机构驱动的驱动控制指令发送到UAV1,或者将使脱离预定区域内的航空站的冷却装置驱动的驱动控制指令发送到冷却装置。然后,航空器控制部23c在确认到脱离预定区域的地表温度小于阈值之后,将在使UAV1盘旋的状态下使物品下降到该脱离预定区域内的脱离控制指令发送到UAV1,或者将使UAV1着陆的脱离控制指令发送到UAV1以使物品脱离。此外,在脱离预定区域的地表温度为阈值以上的情况下,航空器控制部23c也可以将使UAV1向与该脱离预定区域不同的区域移动的移动控制指令发送到UAV1以使物品脱离。
此外,即便在脱离预定区域的地表温度为阈值以上的情况下,航空器控制部23c也可以在确认到在该脱离预定区域中已在要脱离的物品的接收侧完成接收准备之后,将在使UAV1盘旋的状态下使UAV1下降的脱离控制指令发送到UAV1,或者将使UAV1着陆的脱离控制指令发送到UAV1以使该物品脱离。此处,例如通过航空器控制部23c向物品接收侧进行确认通知,并从该接收侧接收表示准备完成的应答而进行在物品接收侧完成接收准备的确认。由此,可更切实地确认在接收侧完成物品的接收准备。
更具体而言,在物品接收侧为用户(人)的情况下,通过向在脱离预定区域接收物品的用户的邮箱地址发送确认通知(邮件),而由该用户所持的移动终端接收该确认通知(邮件)。然后,对应于在移动终端确认了该确认通知(邮件)的用户的操作而从移动终端接收表示准备完成的应答(邮件),由此确认在该接收侧完成接收准备。另一方面,在物品接收侧为UGV的情况下,通过向在脱离预定区域接收物品的UGV的通信用地址发送确认通知而由该UGV接收确认通知。然后,从进入脱离预定区域内的UGV接收表示准备完成的应答,由此确认在该接收侧完成接收准备。
[
接下来,分为实施例1与实施例2对飞行系统S的动作进行说明。另外,以下说明的飞行系统S的动作,是控制服务器CS从飞行中的UAV1定期获取该UAV1的机体ID及航空器信息。
(实施例1)
首先,参照图6对飞行系统S的动作的实施例1进行说明。实施例1是UAV1搬运1个物品的情况的实施例。图6是表示实施例1中由控制服务器CS的控制部23执行的处理的一例的流程图。另外,图6所示的处理也可以由UAV1的控制部16进行。在搬运物品的UAV1到达该物品的脱离预定区域时开始图6所示的处理。例如通过根据UAV1的位置信息与脱离预定区域的位置信息,判定UAV1的当前位置是否进入脱离预定区域内,或UAV1的当前位置是否进入脱离预定区域的附近范围(例如,距脱离预定区域的中心为半径数百m的范围)内,而判断到达脱离预定区域。由控制部23进行所述判定。另外,也可以由UAV1判定到达脱离预定区域。该情况下,当判定UAV1进入脱离预定区域内,或UAV1的当前位置进入脱离预定区域的附近范围内时,将到达通知信息与UAV1的机体ID一起发送到控制服务器CS。
当开始图6所示的处理时,控制部23将脱离预定区域的温度测定指示发送到UAV1。由此,从UAV1获取由UAV1的温度传感器15测定的表示脱离预定区域的地表温度的地表温度分布数据与UAV1的机体ID(步骤S1)。接下来,控制部23根据步骤S1中获取的机体ID,从存储部22中特定出由UAV1搬运的物品(物品ID)(步骤S2)。
接下来,控制部23根据步骤S1中获取的地表温度分布数据,判定脱离预定区域的地表温度是否小于阈值(步骤S3)。此处,阈值以根据步骤S2中特定出的物品种类而不同的方式设定即可。例如,在冷藏或冷冻食品、生鲜食品等那样因温度较高导致品质急剧降低(劣化)的可能性较高的物品的情况下,将其阈值设定得较低。另一方面,在衣服等那样因温度较高导致品质降低的可能性较低的物品的情况下,将其阈值设定得较高。由此,可根据物品种类与该物品的脱离预定区域的地表温度而实现更恰当的应对。控制部23在判定为脱离预定区域的地表温度并非小于阈值(即,阈值以上)的情况下(步骤S3:NO(否)),前进到步骤S4。另一方面,控制部23在判定为脱离预定区域的地表温度小于阈值的情况下(步骤S3:YES(是)),前进到步骤S13。
步骤S4中,控制部23判定是否使脱离预定区域的地表温度降低。例如,控制部23在UAV1具备喷洒机构的情况下,判定使脱离预定区域的地表温度降低。从该UAV1获取UAV1是否具备喷洒机构的信息。或者,控制部23在具备脱离预定区域内的航空站的冷却装置的情况下,判定使脱离预定区域的地表温度降低。从管理该航空站的PMS3获取是否具备脱离预定区域内的航空站的冷却装置的信息。控制部23在判定为使脱离预定区域的地表温度降低的情况下(步骤S4:YES),前进到步骤S5。另一方面,控制部23在判定为不使脱离预定区域的地表温度降低的情况下(步骤S4:NO),前进到步骤S9。
步骤S5中,控制部23执行用以使脱离预定区域的地表温度降低的控制处理。该控制处理如上所述,是将使UAV1的喷洒机构驱动的驱动控制指令发送到UAV1,或者将使脱离预定区域内的航空站的冷却装置驱动的驱动控制指令发送到冷却装置。接下来,控制部23通过将脱离预定区域的温度测定指示发送到UAV1,而从UAV1再次获取由UAV1的温度传感器15再次测定的表示该脱离预定区域的地表温度的地表温度分布数据(步骤S6)。
接下来,控制部23根据步骤S5中再次获取的地表温度分布数据,判定脱离预定区域的地表温度是否小于阈值(步骤S7)。控制部23在判定为脱离预定区域的地表温度并非小于阈值的情况下(步骤S7:NO),前进到步骤S8。另一方面,控制部23在判定为脱离预定区域的地表温度小于阈值的情况下(步骤S7:YES),前进到步骤S13。
步骤S8中,控制部23判定步骤S5的处理后是否经过特定时间(例如,5分钟~10分钟)。控制部23在判定为步骤S5的处理后未经过特定时间的情况下(步骤S8:NO),返回到步骤S6,重复上述处理。另一方面,控制部23在判定为步骤S5的处理后经过特定时间的情况下(步骤S8:YES),前进到步骤S12。
步骤S9中,控制部23执行步骤S2中特定出的物品接收侧的确认处理。该确认处理如上所述,向该物品接收侧进行确认通知。例如,在物品接收侧为在脱离预定区域接收物品的用户的情况下,向该用户的邮箱地址发送确认通知邮件。由此,用户确认通过移动终端接收到的确认通知邮件的内容。所述确认通知邮件中,记述有包含UAV1搬运的物品的接收期限及接收位置的信息(“请在从现在起X分钟(接收期限)以内到Y(接收位置)接收物品A”的信息)即可。
此处,物品的接收期限X也能以根据脱离预定区域的表面温度而不同的方式设定。例如,表面温度越高,则将接收期限设定得越短。或者,物品的接收期限X也能以根据物品种类而不同的方式设定。例如,在冷藏或冷冻食品、生鲜食品等那样因温度较高导致品质急剧降低的可能性较高的物品的情况下,将接收期限设定得较短。此外,物品的接收位置Y在用户的移动终端中显示在表示脱离预定区域的地图上即可。在由用户对确认通知邮件进行确认后,对应于该用户的操作而将表示准备完成的应答邮件从移动终端发送到控制服务器CS。
另外,步骤S9中,控制部23也可以获取由UAV1的摄像部14从脱离预定区域上空拍摄的图像数据(人脸图像数据、或UGV的标记图像数据),并将该获取的图像数据、与物品接收侧的信息中所包含的图像数据(人脸图像数据、或UGV的标记图像数据)加以比对(人脸认证、或标记认证)。
接下来,控制部23判定是否在脱离预定区域中已在要脱离的物品的接收侧完成接收准备(步骤S10)。例如,控制部23在对应于步骤S9中的确认通知而从物品接收侧接收到表示准备完成的应答的情况下,或使用图像数据的比对(人脸认证、或标记认证)成功的情况下,判定为已在该接收侧完成接收准备。控制部23在判定为已在物品接收侧完成接收准备的情况下(步骤S10:YES),前进到步骤S13。另一方面,控制部23在判定为未在物品接收侧完成接收准备的情况下(步骤S10:NO),前进到步骤S11。
步骤S11中,控制部23判定步骤S9的处理后是否经过特定时间(例如,20分钟~30分钟)。控制部23在判定为步骤S9的处理后未经过特定时间的情况下(步骤S11:NO),返回到步骤S10,重复上述处理。另一方面,控制部23在判定为步骤S9的处理后经过特定时间的情况下(步骤S11:YES),前进到步骤S12。
步骤S12中,控制部23执行用以使UAV1移动的控制处理,结束图6所示的处理。该控制处理中,如上所述,将使UAV1向与脱离预定区域不同的区域移动的移动控制指令发送到UAV1以使物品脱离。由此,UAV1例如向不同区域移动,并着陆到该不同区域(例如,其它航空站等)且待机直到脱离预定区域的地表温度降低为止。或者,UAV1使物品在不同的区域脱离并交递给该物品接收侧。另外,UAV1也可以放弃将物品交递给接收侧而向不同的区域移动来回收物品。
步骤S13中,控制部23执行用以使物品脱离的控制处理,结束图6所示的处理。该控制处理如上所述,是将在使UAV1盘旋的状态下使物品下降到脱离预定区域内的脱离控制指令发送到UAV1,或者将使UAV1着陆到脱离预定区域内的脱离控制指令发送到UAV1以使物品脱离。由此,通过使物品在从盘旋在脱离预定区域内的UAV1利用卷盘或绞车等下降并到达例如地面时脱离,而将该物品交递给接收侧。或者,通过使物品从着陆到脱离预定区域内的UAV1脱离,而将该物品交递给接收侧。在使物品如此脱离后,UAV1返航。
(实施例2)
接下来,参照图7对飞行系统S的动作的实施例2进行说明。实施例2是UAV1搬运多个物品的情况的实施例。图7是表示实施例2中由控制服务器CS的控制部23执行的处理的一例的流程图。另外,也可以由UAV1的控制部16进行图7所示的处理。与图6所示的处理相同,在搬运物品的UAV1到达该物品的脱离预定区域时开始图7所示的处理。图7所示的步骤S21及S22的处理与图6所示的步骤S1及S2的处理相同。
步骤S23中,控制部23根据步骤S21中获取的地表温度分布数据,判定脱离预定区域内的多个地点中是否有地表温度小于阈值的地点。此处,与实施例1相同,阈值以根据步骤S22中特定出的物品种类而不同的方式设定即可。控制部23在判定为脱离预定区域内的多个地点中无地表温度小于阈值的地点的情况下(步骤S23:YES),前进到步骤S24。另一方面,控制部23在判定为脱离预定区域内的多个地点中有地表温度小于阈值的地点的情况下(步骤S23:YES),前进到步骤S34。
步骤S24中,与图6所示的步骤S4相同,控制部23判定是否使脱离预定区域的地表温度降低。控制部23在判定为使脱离预定区域的地表温度降低的情况下(步骤S24:YES),前进到步骤S25。另一方面,控制部23在判定为不使脱离预定区域的地表温度降低的情况下(步骤S24:NO),前进到步骤S29。
步骤S25中,与图6所示的步骤S5相同,控制部23执行用以使脱离预定区域的地表温度降低的控制处理。接下来,与图6所示的步骤S6相同,控制部23通过将脱离预定区域的温度测定指示发送到UAV1,而从UAV1再次获取表示该脱离预定区域的地表温度的地表温度分布数据(步骤S26)。
接下来,控制部23根据步骤S26中再次获取的地表温度分布数据,判定脱离预定区域内的多个地点中是否有地表温度小于阈值的地点(步骤S27)。控制部23在判定为脱离预定区域内的多个地点中无地表温度小于阈值的地点的情况下(步骤S27:NO),前进到步骤S28。另一方面,控制部23在判定为脱离预定区域内的多个地点中有地表温度小于阈值的地点的情况下(步骤S27:YES),前进到步骤S34。
步骤S28中,控制部23判定步骤S25的处理后是否经过特定时间。控制部23在判定为步骤S25的处理后未经过特定时间的情况下(步骤S28:NO),返回到步骤S26,重复上述处理。另一方面,控制部23在判定为步骤S25的处理后经过特定时间的情况下(步骤S28:YES),前进到步骤S33。
步骤S29中,与图6所示的步骤S9相同,控制部23执行步骤S22中特定出的物品接收侧的确认处理。接下来,与图6所示的步骤S10相同,控制部23判定是否在脱离预定区域内的脱离地点已在要脱离的物品的接收侧完成接收准备(步骤S30)。控制部23在判定为脱离地点中未在要脱离的物品的接收侧完成接收准备的情况下(步骤S30:NO),前进到步骤S31。另一方面,控制部23在判定为脱离地点中已在要脱离的物品的接收侧完成接收准备的情况下(步骤S30:YES),前进到步骤S34。
步骤S31中,控制部23判定步骤S29的处理后是否经过特定时间。控制部23在判定为步骤S29的处理后未经过特定时间的情况下(步骤S31:NO),返回到步骤S30,重复上述处理。另一方面,控制部23在判定为步骤S29的处理后经过特定时间的情况下(步骤S31:YES),前进到步骤S32。
步骤S32中,控制部23判定由UAV1搬运的物品中是否有未在步骤S22中特定出的物品(未特定物品)。控制部23在判定为有未特定物品的情况下(步骤S32:YES),返回到步骤S22,特定出未特定物品并重复上述处理。另一方面,控制部23在判定为无未特定出的物品的情况下(步骤S32:NO),前进到步骤S33。步骤S33中,与图6所示的步骤S12相同,控制部23执行用以使UAV1移动的控制处理,结束图7所示的处理。
步骤S34中,控制部23选定脱离预定区域中地表温度小于阈值的地点作为物品(即,步骤S22中特定出的物品)的脱离地点。接下来,控制部23执行用以使物品脱离的控制处理(步骤S35)。该控制处理如上所述,是将在使UAV1盘旋的状态下使物品下降到脱离地点的脱离控制指令发送到UAV1,或者将使UAV1着陆到脱离地点的脱离控制指令发送到UAV1以使物品脱离。由此,通过在使物品从盘旋的UAV1利用卷盘或绞车等下降并到达脱离地点时脱离,而将该物品交递给接收侧。或者,通过使物品从着陆到脱离地点的UAV1脱离,而将该物品交递给接收侧。使物品如此脱离后,UAV1返航。
接下来,控制部23判定由UAV1搬运的物品中是否有未在步骤S22中特定出的物品(未特定物品)(步骤S36)。控制部23在判定为有未特定物品的情况下(步骤S36:YES),返回到步骤S22,特定出未特定物品并重复上述处理。由此,针对每一物品选定脱离预定区域的地表温度小于阈值(根据物品种类来设定的阈值)的地点作为脱离地点。另一方面,控制部23在判定为无未特定物品的情况下(步骤S36:NO),前进到步骤S37。
步骤S37中,控制部23判定由UAV1搬运的物品中是否有未从UAV1脱离的物品(未脱离物品)。控制部23在判定为有未脱离物品的情况下(步骤S37:YES),执行用以使UAV1移动的控制处理(步骤S33),结束图7所示的处理。另一方面,控制部23在判定为无未脱离物品的情况下(步骤S37:NO),结束图7所示的处理。
如以上所说明,根据上述实施方式,构成为获取由UAV1的温度传感器15测定的脱离预定区域的地表温度,根据该脱离预定区域的地表温度来进行与物品脱离相关的控制,因此可防止因作为搬运对象的物品的脱离预定区域的地表温度对物品造成不良影响(例如,可抑制物品的品质劣化)。
另外,上述实施方式为本发明的一实施方式,本发明并不限定于上述实施方式,也可以在不脱离本发明主旨的范围对上述实施方式的各种构成等加以变更,该情况也包含在本发明的技术性范围内。上述实施方式中,列举物品作为搬运对象的例进行了说明,但也可以将本发明应用于搬运对象为人或动物的情况。例如,在脱离预定区域的地表温度小于阈值的情况下,控制部使人在航空器(例如,空中滑行机)盘旋的状态下降以让人(例如乘客)脱离,或者使航空器着陆以让人脱离。另一方面,在脱离预定区域的地表温度为阈值以上的情况下,控制部使航空器向与脱离预定区域不同的区域移动以让人脱离。由此,可防止因脱离预定区域的地表温度而对人造成不良影响。换言之,可防止人下降到其所不希望的较热地面。
此外,本发明也能够应用于即便航空器内不存在操纵者(飞行员)也可以飞行的载人航空器。此外,上述实施方式中,构成为根据脱离预定区域的地表温度来进行与搬运对象的脱离相关的控制,但也可以构成为根据航空器(例如,UAV1)的着陆预定区域的地表温度来进行与航空器的着陆相关的控制。由此,可防止因着陆预定区域的地表温度而对航空器造成不良影响。例如,在航空器的着陆预定区域的地表温度小于阈值的情况下,与上述实施方式相同,控制部16或23使航空器着陆到该着陆预定区域。另一方面,在航空器的着陆预定区域的地表温度为阈值以上的情况下,控制部16或23进行用以使该地表温度降低的控制,在确认该地表温度小于阈值后,使航空器着陆到该区域中。用以使着陆预定区域的地表温度降低的控制处理与上述实施方式相同。此外,在着陆预定区域的地表温度为阈值以上的情况下,控制部16或23也可以使航空器向与该区域不同的区域移动。此外,控制部16或23也可以根据航空器的着陆预定区域内的多个地点的地表温度分布,选定地表温度小于阈值的地点作为航空器着陆的地点,使航空器着陆到该选定的地点。
[符号的说明]
1 UAV
2 UTMS
3 PMS
11 驱动部
12 测位部
13 无线通信部
14 摄像部
15 温度传感器
16 控制部
21 通信部
22 存储部
23 控制部
23a 地表温度获取部
23b 脱离地点选定部
23c 航空器控制部
CS 控制服务器
S 飞行系统。
- 进行航空器控制的控制装置、及控制方法
- 用于对空间进行屏蔽的控制装置、系统、方法以及航空器