无人机机库及无人机停靠系统
文献发布时间:2023-06-19 11:42:32
技术领域
本申请涉及无人机技术领域,具体而言,涉及一种无人机机库及无人机停靠系统。
背景技术
无人机的应用方兴未艾,特别是微型无人机自动起降的实现,正在森林防火巡检、边防巡逻、污染源普查、定点实时监控等领域推广应用,实现了无人机无人操作的定时、定航线全自动起降巡检,给工作带来了极大的方便。
无人机在工作一段时间后,需要停靠在机库内进行充电,但现有的无人机机库多采用升降台实现无人机的出入库,但升降台的结构较为复杂,进而使得无人机机库整体结构复杂,体积庞大,耗能高。
发明内容
本申请实施例的目的在于提供一种无人机机库与无人机停靠系统,该无人机机库结构简单,耗能较小,可实现无人机的快速出入库。
本申请实施例提供了一种无人机机库,该无人机机库包括底座、机库本体、机械臂以及磁吸装置,机库本体设置在所述底座上,用于存储无人机;机械臂一端设置在所述底座上,另一端为抓取端,所述机械臂可在预设范围内移动以使所述抓取端移动至所述机库本体内或从所述机库本体内移出;磁吸装置设置在所述抓取端,用于吸取所述无人机。
在上述实现过程中,相比于现有的升降台结构,上述无人机机库通过设置机械臂配合磁吸装置实现无人机的入库与出库,可有效简化无人机机库的结构,降低整个无人机机库的重量,且电机驱动体积较小的机械臂摆动,耗能较小,并且采用磁吸装置吸取无人机,可实现机械臂对无人机的快速精准抓取,有效提高无人机的出入库效率。
在一种可能的实现方式中,上述无人机机库还包括定位装置与控制系统,定位装置设置在所述机械臂的抓取端上,用于定位所述无人机并生成定位信号;控制系统通信连接于所述定位装置与所述机械臂,用于接收所述定位信号并根据所述定位信号控制所述机械臂移动以抓取所述无人机。
在上述实现过程中,上述无人机机库通过设置定位装置与控制系统,可实现高精度的跟踪悬停的无人机,且定位装置与控制系统配合磁吸装置,可实现快速精确抓取无人机。
在一种可能的实现方式中,所述机械臂的抓取端上设置有第一充电触点,所述无人机上设置有与第一充电触点适配的第二充电触点,当所述磁吸装置吸取住所述无人机时,所述第一充电触点与所述第一充电触点对接。
在上述实现过程中,当机械臂抓取到无人机,即磁吸装置吸取住无人机时,机械臂的抓取端上的第一充电触点与无人机上的第二充电触点对接,对无人机进行充电,即机械臂的一次动作可同时实现对无人机的抓取、充电,结构简单,动作高效。
在一种可能的实现方式中,上述无人机机库还包括释放装置,该释放装置设置在所述机械臂上,用于减弱或消除所述磁吸装置的磁性以释放所述无人机。
在上述实现过程中,当无人机在机库本体内充电完毕后,机械臂移动将无人机托举到机库本体外,无人机启动螺旋桨,此时释放装置减弱或消除磁吸装置的磁性,使磁吸装置减小或丧失对无人机约束力,无人机在螺旋桨转动的升力作用下起飞。若不设置释放装置,无人机则需要启动螺旋桨产生较大的升力以摆脱磁吸装置,通过设置释放装置可减弱无人机脱离机械臂的难度,实现无人机顺利脱离机械臂。
在一种可能的实现方式中,所述磁吸装置包括永磁体以及两个相对且间隔设置的导磁体,两个所述导磁体之间配置出容纳腔,所述永磁体设置在所述容纳腔内并可在所述容纳腔内转动;当所述永磁体的两极分别与两个所述导磁体接触时,所述磁吸装置对外产生磁吸力;当所述永磁体的两极均同时接触两个所述导磁体时,所述磁吸装置丧失磁吸力;所述释放装置连接于所述永磁体,用于带动所述永磁体在所述容纳腔内转动。
在上述实现过程中,上述无人机机库将磁吸装置设置为永磁体在两个导磁体中间转动,并通过释放装置带动永磁体转动进而实现对磁吸装置的开关控制,结构简单,操作方便。
在一种可能的实现方式中,该无人机机库还包括设置在所述底座上的第一旋转装置,所述机械臂靠近所述底座的一端连接于所述第一旋转装置,所述机械臂可绕所述第一旋转装置旋转;和/或,该无人机机库还包括设置在所述底座上的第一摆动装置,所述机械臂靠近所述底座的一端连接于所述第一摆动装置,所述机械臂可绕所述第一摆动装置摆动。
在上述实现过程中,通过设置第一旋转装置可实现机械臂在底座上的旋转,通过设置第一摆动装置可实现机械臂在底座上的前后左右的摆动,进而扩大机械臂的移动范围,提高机械臂的灵活性,使得机械臂能够高效准确地抓取无人机。
在一种可能的实现方式中,该无人机机库还包括设置在所述抓取端上的第二旋转装置,所述磁吸装置设置在所述第二旋转装置上且可绕所述第二旋转装置旋转;和/或,还包括设置在所述抓取端上的第二摆动装置,所述磁吸装置设置在所述第二摆动装置且可绕所述第二摆动装置俯仰摆动。
在上述实现过程中,抓取无人机时,第二旋转装置带动磁吸装置旋转,第二摆动装置带动磁吸装置俯仰摆动,使磁吸装置对准无人机,准确高效地吸取无人机,实现无人机的抓取。
在一种可能的实现方式中,还包括设置在底座上的滑动装置,所述机械臂通过所述滑动装置滑动安装于所述底座,以靠近或远离所述机库本体。
在上述实现过程中,抓取无人机时,机械臂可通过滑动装置在底座上滑动以靠近无人机。滑动装置带动机械臂靠近或远离机库本体,可在机械臂长度一定的情况下,进一步扩大机械臂的运动范围,进而使得机械臂可在更大的范围内抓取无人机。
在一种可能的实现方式中,所述机械臂设置在所述机库本体外,所述机库本体靠近所述机械臂的侧板上开设有开口,所述机械臂的抓取端通过所述开口进出所述机库本体。
在上述实现过程中,当机械臂的抓取端抓取到无人机后,机械臂转动,机械臂的抓取端带动无人机通过开口进入机库本体内,实现无人机的入库动作。
第二方面,本申请实施例还提供了一种无人机停靠系统,该无人机统考系统包括上述任一实施例中所述的无人机机库。
在上述实现过程中,采用上述无人机机库本体的无人机停靠系统,结构简单,操作方便,耗能较低,且可高效实现无人机的入库出库。
附图说明
为了更清楚地说明本申请实施例的技术方案,下面将对本申请实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本申请的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
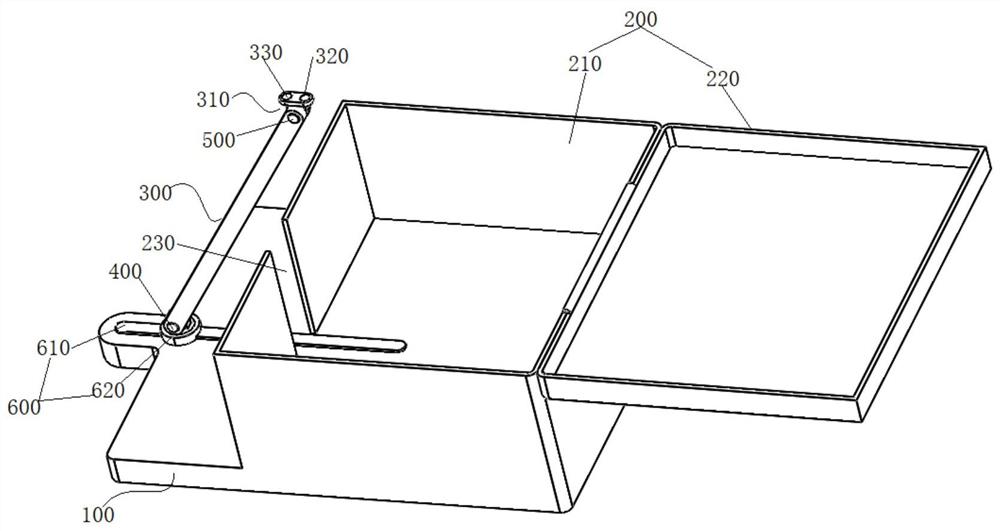
图1为本申请实施例提供的一种无人机机库的结构图;
图2为本申请实施例提供的一种磁吸装置对外产生磁吸力的状态结构图;
图3为本申请实施例提供的一种磁吸装置丧失磁吸力的状态结构图。
图标:100-底座;200-机库本体;210-机舱;220-舱盖;300-机械臂;310-抓取端;320-磁吸装置;321-永磁体;322-导磁体;323-容纳腔;330-定位装置;400-第一摆动装置;500-第二摆动装置;600-滑动装置;610-滑动轨道;620-滑动件;230-开口;240-转动轴。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行描述。
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。同时,在本申请的描述中,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
本申请实施例提供了一种无人机机库,请参考图1,图1为本申请实施例提供的一种无人机机库的结构图,该无人机机库包括底座100、机库本体200、机械臂300以及磁吸装置320,机库本体200设置在所述底座100上,用于存储无人机;机械臂300一端设置在所述底座100上,另一端为抓取端310,所述机械臂300可在预设范围内移动以使所述抓取端310移动至所述机库本体200内或从所述机库本体200内移出;磁吸装置320设置在所述抓取端310,用于吸取所述无人机。
在上述实现过程中,当无人机机库附近有无人机等待进入机库内时,机械臂300在预设范围内移动使抓取端310靠近无人机,当磁吸装置320靠近无人机至预定距离以内后,预定距离为5-10mm,磁吸装置320吸取无人机,使无人机固定在机械臂300的抓取端310,即完成机械臂300对无人机的抓取,然后抓取端310移动至机库本体200内进行充电,待无人机充电完毕后,机械臂300移动使抓取端310移动到机库本体200外,无人机启动螺旋桨产生一定的升力挣脱磁吸装置320起飞,即完成无人机的释放,此时机库本体200内空出,等待下一个无人机的停靠。
可知,相比于现有的升降台结构,上述无人机机库通过设置机械臂300配合磁吸装置320实现无人机的入库与出库,可有效简化无人机机库的结构,降低整个无人机机库的重量,且电机驱动体积较小的机械臂300摆动,耗能较小,并且采用磁吸装置320吸取无人机,可实现机械臂300对无人机的快速精准抓取,有效提高无人机的出入库效率。
需要说明的是,上述预设范围是指抓取端310可将无人机放入机库本体200或移出机库本体200的移动移动范围。
在一种可能的实现方式中,上述无人机机库还包括定位装置330与控制系统,定位装置330设置在所述机械臂300的抓取端310上,用于定位所述无人机并生成定位信号;控制系统通信连接于所述定位装置330与所述机械臂300,用于接收所述定位信号并根据所述定位信号控制所述机械臂300移动以抓取所述无人机。
在上述实现过程中,当定位装置330定位到无人机机库附近有无人机等待停靠时,定位装置330生成定位信号,并向控制系统发送定位信号,控制系统接收到定位信号后根据定位信号控制机械臂300移动,机械臂300移动,待抓取端310移动到无人机附近时,磁吸装置320吸取无人机,进而实现对无人机的抓取。
可知,上述无人机机库通过设置定位装置330与控制系统,可实现高精度的跟踪悬停的无人机,且定位装置330与控制系统配合磁吸装置320,可实现快速精确抓取无人机。
在一些实施例中,上述定位装置330可采用视觉定位装置330,例如定位摄像头,或采用激光定位装置330、红外线定位装置330等,本申请实施例对此不作限定。
在一种可能的实现方式中,所述机械臂300的抓取端310上设置有第一充电触点,所述无人机上设置有与第一充电触点适配的第二充电触点,当所述磁吸装置320吸取住所述无人机时,所述第一充电触点与所述第一充电触点对接。
在上述实现过程中,当机械臂300抓取到无人机,即磁吸装置320吸取住无人机时,机械臂300的抓取端310上的第一充电触点与无人机上的第二充电触点对接,对无人机进行充电,即机械臂300的一次动作可同时实现对无人机的抓取、充电,结构简单,动作高效。
在一种可能的实现方式中,上述无人机机库还包括释放装置,该释放装置设置在所述机械臂300上,用于减弱或消除所述磁吸装置320的磁性以释放所述无人机。
在上述实现过程中,当无人机在机库本体200内充电完毕后,机械臂300移动将无人机托举到机库本体200外,无人机启动螺旋桨,此时释放装置减弱或消除磁吸装置320的磁性,使磁吸装置320减小或丧失对无人机约束力,无人机在螺旋桨转动的升力作用下起飞。若不设置释放装置,无人机需要启动螺旋桨产生较大的升力以摆脱磁吸装置320,通过设置释放装置可减弱无人机脱离机械臂300的难度,实现无人机顺利脱离机械臂300。
在一种可能的实现方式中,请参考图2与图3,图2为本申请实施例提供的一种磁吸装置对外产生磁吸力的状态结构图;图3为本申请实施例提供的一种磁吸装置丧失磁吸力的状态结构图。所述磁吸装置320包括永磁体321以及两个相对且间隔设置的导磁体322,两个所述导磁体322之间配置出容纳腔323,所述永磁体321设置在所述容纳腔323内并可在所述容纳腔323内转动;当所述永磁体321的两极分别与两个所述导磁体322接触时,所述磁吸装置320对外产生磁吸力;当所述永磁体321的两极均同时接触两个所述导磁体322时,所述磁吸装置320丧失磁吸力;所述释放装置连接于所述永磁体321,用于带动所述永磁体321在所述容纳腔323内转动。
在上述实现过程中,当需要机械臂300抓取无人机时,通过释放装置带动永磁体321转动,使永磁体321的两极分别与两个导磁体322接触,两个导磁体322一个是S极,另一个是N极,此时永磁体321与两个导磁体322形成的整体为一个具有磁性的装置,对外产生磁吸力,进而可吸取无人机。当需要释放无人机时,无人机启动螺旋桨转动,然后通过释放装置带动永磁体321转动,使永磁体321的两极同时接触两个导磁体322,即永磁体321的每一极同时与两个导磁体322接触,此时,两个导磁体322的极性相同,并且被自身的另一磁极中和,因此磁吸装置320整体对外不呈现正负极,磁吸装置320丧失磁吸力,对无人机丧失约束力,此时无人机在升力的作用下起飞。
上述无人机机库将磁吸装置320设置为永磁体321在两个导磁体322中间转动,并通过释放装置带动永磁体321转动进而实现对磁吸装置320的开关控制,结构简单,操作方便。
可选地,上述释放装置为伺服电机,伺服电机的输出轴与永磁体321连接以带动永磁体321转动,进而可通过控制驱动电机的输出轴的转动角度来控制永磁体321的转动角度。
在一种可能的实现方式中,该无人机机库还包括设置在所述底座100上的第一旋转装置,所述机械臂300靠近所述底座100的一端连接于所述第一旋转装置,所述机械臂300可绕所述第一旋转装置旋转;和/或,该无人机机库还包括设置在所述底座100上的第一摆动装置400,所述机械臂300靠近所述底座100的一端连接于所述第一摆动装置400,所述机械臂300可绕所述第一摆动装置400摆动。
在上述实现过程中,通过设置第一旋转装置可实现机械臂300在底座100上的旋转,通过设置第一摆动装置400可实现机械臂300在底座100上的前后左右的摆动,进而扩大机械臂300的移动范围,提高机械臂300的灵活性,使得机械臂300能够高效准确地抓取无人机。
可选地,第一摆动装置400为设置在底座100上的旋转轴结构。
在一种可能的实现方式中,该无人机机库还包括设置在所述抓取端310上的第二旋转装置,所述磁吸装置320设置在所述第二旋转装置上且可绕所述第二旋转装置旋转;和/或,还包括设置在所述抓取端310上的第二摆动装置500,所述磁吸装置320设置在所述第二摆动装置500且可绕所述第二摆动装置500俯仰摆动。
在上述实现过程中,抓取无人机时,第二旋转装置带动磁吸装置320旋转,第二摆动装置500带动磁吸装置320俯仰摆动,使磁吸装置320对准无人机,准确高效地吸取无人机,实现无人机的抓取。
可选地,第二摆动装置500为设置在抓取端310的旋转轴结构。
在一种可能的实现方式中,定位装置330也设置在第二旋转装置上且可绕所述第二旋转装置旋转,第二旋转装置带动定位装置330旋转搜索无人机的位置,提高了定位装置330灵活性,并可提高其定位效率。
在一种可能的实现方式中,还包括设置在底座100上的滑动装置600,所述机械臂300通过所述滑动装置600滑动安装于所述底座100,以靠近或远离所述机库本体200。
在上述实现过程中,抓取无人机时,机械臂300可通过滑动装置600在底座100上滑动以靠近无人机。滑动装置600带动机械臂300靠近或远离机库本体200,可在机械臂300长度一定的情况下,进一步扩大机械臂300的运动范围,进而使得机械臂300可在更大的范围内抓取无人机。
在一种可能的实现方式中,滑动装置600包括设置在底座100上的滑动轨道610以及可沿滑动轨道610滑动的滑动件620,机械臂300远离抓取端310的一端安装在所述滑动件620上。
可选地,第一摆动装置400与第一旋转装置设置在滑动件620上。
在一种可能的实现方式中,所述机械臂300设置在所述机库本体200外,所述机库本体200靠近所述机械臂300的侧板上开设有开口230,所述机械臂300的抓取端310通过所述开口230进出所述机库本体200。
在上述实现过程中,当机械臂300的抓取端310抓取到无人机后,机械臂300转动,机械臂300的抓取端310带动无人机通过开口230进入机库本体200内,实现无人机的入库动作。
在一种可能的实现方式中,机库本体200包括机舱210与舱盖220,所述机舱210包括舱口,所述舱盖220设置在所述舱口处,用于关闭或打开所述舱口。
在一种可能的实现方式中,机库本体200还包括驱动装置,所述驱动装置连接于所述舱盖220,用于驱动所述舱盖220打开或关闭,所述驱动装置通信连接于所述控制系统。
当控制系统接收到机库本体200附近有无人机需要停靠时,控制系统控制驱动装置自动打开舱盖220,当无人机进入机舱210后,控制系统控制驱动装置自动关闭舱盖220。
在一种可能的实现方式中,所述机舱210的舱口处设置有滑道,所述舱盖220可沿所述滑道滑动以关闭或打开所述舱口。
在一种可能的实现方式中,所述机舱210的舱口边沿设置有转动轴240,所述舱盖220的侧边连接于所述转动轴240,并可在转动轴240的带动下转动以关闭或打开所述舱口。
在一些实施例中,驱动装置为驱动转动轴240转动的电机。
第二方面,本申请实施例还提供了一种无人机停靠系统,该无人机统考系统包括上述任一实施例中所述的无人机机库。
在上述实现过程中,采用上述无人机机库本体200的无人机停靠系统,结构简单,操作方便,耗能较低,且可高效实现无人机的入库出库。
以上所述仅为本申请的实施例而已,并不用于限制本申请的保护范围,对于本领域的技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本申请的保护范围之内。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应所述以权利要求的保护范围为准。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
- 无人机机库及无人机停靠系统
- 一种用于无人机停靠充电的梳齿式停机库