一种多功能气囊旋翼无人机系统及控制方法
文献发布时间:2023-06-19 11:42:32
技术领域
本发明涉及无人机技术领域,尤其是涉及一种多功能气囊旋翼无人机系统及控制方法。
背景技术
随着无人机技术的发展,无人机在各个领域都发挥着越来越大的作用,尤其是在巡检与勘探方面,由于在地下封闭狭窄环境中进行巡检和勘探具有极大的危险性,为了获取准确的勘测数据,使用无人机代替工作人员进入地下完成工作成为了亟待解决的重要问题。要实现无人机在封闭狭窄环境中的巡检和勘探,需要解决的问题就是无人机在狭窄环境中的避障和保护,以及无人机在无补给条件下续航里程和载重能力的限制。
现有技术中,为了对无人机进行保护,基本都是在无人机上安装一个安全气囊,发生碰撞时释放压缩气体使气囊迅速膨胀以保护无人机,但是,这样的系统只能在无人机发生剧烈碰撞时才会触发安全气囊。对于在狭窄环境下飞行的无人机,不能很好的保护无人机以及无人机上搭载的探测设备,而且一旦触发安全气囊后,会极大的增大无人机占用体积,难以继续作业,甚至难以返航,不适用于狭窄环境。也有一些无人机安装了上升气囊来增加续航和负载能力,这些气囊往往安装在无人机本体上,体积庞大,增加了无人机占用的空间,难以应对复杂的地下环境。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种多功能气囊旋翼无人机系统及控制方法,在无人机本体外设置碳纤维骨架,碳纤维骨架上安装气囊模块,在不影响无人机本体工作的前提下,既保护了无人机本体与探测模块,也能为无人机本体提供浮力以减小能耗。
本发明的目的可以通过以下技术方案来实现:
一种多功能气囊旋翼无人机系统,包括无人机本体、碳纤维骨架、气囊模块、探测模块和控制器,所述碳纤维骨架安装在无人机本体上,所述气囊模块安装在碳纤维骨架上;
所述碳纤维骨架包括主环状骨架、多个副环状骨架和多个连接骨架,所述主环状骨架与无人机本体固定连接,所述副环状骨架与主环状骨架对应位置的部分平行,副环状骨架的形状与主环状骨架的形状在几何上相似,且副环状骨架的面积小于主环状骨架的面积,连接骨架用于连接主环状骨架和副环状骨架,连接骨架与主环状骨架和副环状骨架的连接处使用四通连接件连接;
所述气囊模块包括主环形气囊、副环形气囊和杆状气囊,所述主环形气囊安装在主环状骨架上,所述副环形气囊安装在副环状骨架上,所述杆状气囊安装在连接骨架上;
所述气囊模块上设有电子皮肤系统和气阀,所述电子皮肤系统和气阀均与控制器通信连接。
进一步的,所述主环形气囊、副环形气囊和杆状气囊中充有氢气,无人机本体上安装有与控制器和气囊模块连接的便携式NaBH
进一步的,所述多功能气囊旋翼无人机系统还包括与控制器通信连接的环境探测器,所述环境探测器包括超声波测距传感器、红外传感器和激光雷达。
进一步的,所述环境探测器安装在碳纤维骨架上和\或无人机本体上。
进一步的,所述电子皮肤系统为电容式皮肤系统,包括检测电路和与检测电路电连接的电极,电极能够与接近的导体构成电容,并将用于表征所述电容或其变化量的电信号传输至检测电路;检测电路用于将表征所述电容或其变化量的电信号转换为电容值或其变化量的电信号。
进一步的,所述电子皮肤系统上还设有与控制器通信连接的力触觉感知传感器和张力传感器。
进一步的,所述探测模块包括激光雷达、可见光云台相机、照明设备和无线通讯设备。
进一步的,所述探测模块安装在碳纤维骨架上和\或无人机本体上。
进一步的,所述主环状骨架为多边形,所述副环状骨架为多边形,主环状骨架的顶点和副环状骨架的顶点通过所述连接骨架连接。
进一步的,各个连接骨架的顶端相互连接组成多边形,各个连接骨架的底端相互连接组成多边形。
一种多功能气囊旋翼无人机系统的控制方法,包括以下步骤:
S1:控制器获取无人机当前信息,所述无人机当前信息包括无人机周围环境信息、无人机运行参数信息和气囊模块信息;
S2:基于无人机当前信息判断无人机系统的状态,如果无人机系统的状态为紧急保护状态或避障状态,则生成紧急保护状态或避障状态的控制指令,否则,检测无人机系统当前的工作模式,工作模式包括手动控制模式和自动控制模式;
S3:如果无人机系统处于手动控制模式,则控制器接收控制指令,执行步骤S4;否则,无人机系统处于自动控制模式:如果无人机系统的状态为节能状态,则生成节能状态的控制指令,否则,无人机系统的状态为狭窄行进状态,生成狭窄行进状态的控制指令;
S4:无人机系统执行控制指令,重复步骤S1至步骤S4。
进一步的,当无人机系统出现故障时,则无人机系统的状态为紧急保护状态,紧急保护状态的控制指令包括对气囊模块进行充气;当无人机系统发生碰撞时,则无人机系统的状态为避障状态,避障状态的控制指令包括气囊模块向碰撞发生的位置排气;当无人机系统的周围环境中障碍物与无人机系统的最小距离大于预设置的阈值时,则无人机系统的状态为节能状态,节能状态的控制指令包括对气囊模块进行充气;当无人机系统的周围环境中障碍物与无人机系统的最小距离小于预设置的阈值时,则无人机系统的状态为狭窄行进状态,狭窄行进状态的控制指令包括根据障碍物与无人机系统的最小距离对气囊模块进行排气。
与现有技术相比,本发明具有以下有益效果:
(1)在无人机本体外设置碳纤维骨架,碳纤维骨架上安装可充放气的气囊模块,在不影响无人机本体工作的前提下,既保护了无人机本体与探测模块,也能为无人机本体提供浮力以减小能耗。
(2)碳纤维骨架的形状与无人机本体的形状相适应,不影响无人机本体在狭窄环境下的飞行,气囊模块包括主环形气囊、副环形气囊和杆状气囊,与碳纤维骨架的形状相适应,能更好的保护无人机本体与探测模块。
(3)在气囊模块上安装有电子皮肤系统和气阀,便于获取环境信息并根据环境信息调节气囊模块的体积,从而更好地进行无人机本体的飞行或避障。
(4)根据无人机当前信息判断无人机系统的状态,根据不同的状态和控制模式得到控制指令,对气囊模块的充放气进行调节,以保护无人机系统或实现避障、节能等作用。
附图说明
图1为多功能气囊旋翼无人机系统的正视图;
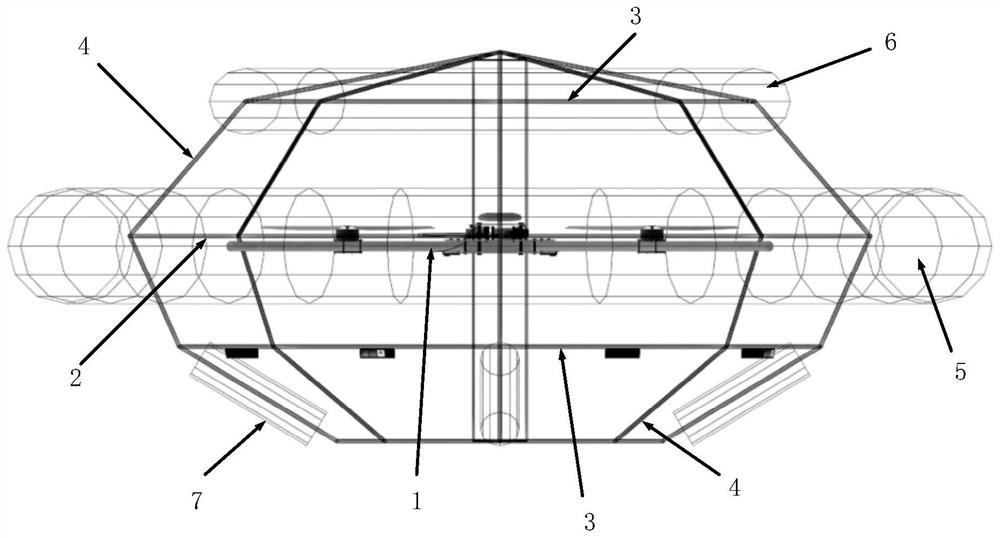
图2为多功能气囊旋翼无人机系统的俯视图;
图3为控制方法的流程图;
附图标记:1、无人机本体,2、主环状骨架、3、副环状骨架,4、连接骨架,5、主环形气囊,6、副环形气囊,7、杆状气囊。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
在附图中,结构相同的部件以相同数字标号表示,各处结构或功能相似的组件以相似数字标号表示。附图所示的每一组件的尺寸和厚度是任意示出的,本发明并没有限定每个组件的尺寸和厚度。为了使图示更清晰,附图中有些地方适当夸大了部件。
实施例1:
一种多功能气囊旋翼无人机系统,如图1和图2所示,包括无人机本体1、碳纤维骨架、气囊模块、探测模块和控制器,碳纤维骨架安装在无人机本体1上,气囊模块安装在碳纤维骨架上;碳纤维骨架包括主环状骨架2、多个副环状骨架3和多个连接骨架4,主环状骨架2与无人机本体1固定连接,副环状骨架3与主环状骨架2对应位置的部分平行,副环状骨架3的形状与主环状骨架2的形状在几何上相似,且副环状骨架3的面积小于主环状骨架2的面积,连接骨架4用于连接主环状骨架2和副环状骨架3,连接骨架4与主环状骨架2和副环状骨架3的连接处使用四通连接件连接;
气囊模块包括主环形气囊5、副环形气囊6和杆状气囊7,主环形气囊5安装在主环状骨架2上,副环形气囊6安装在副环状骨架3上,杆状气囊7安装在连接骨架4上;气囊模块上设有电子皮肤系统和气阀,电子皮肤系统和气阀均与控制器通信连接。主环形气囊5、副环形气囊6和杆状气囊7中充有氢气,可以提供向上的浮力,以抵消一部分重力,降低了无人机的能耗、增加最大飞行里程、提高载重量。
无人机本体1上安装有与控制器和气囊模块连接的便携式NaBH
本实施例中,无人机本体1为四旋翼巡检无人机,体积小,重量轻,运行稳定,无人机本体1位于碳纤维骨架的中心位置,碳纤维骨架强度高、重量低,安装在碳纤维骨架上的气囊模块可以在不影响无人机本体1的旋翼的功能的情况下,提供升力和缓冲,主环形气囊5、副环形气囊6和杆状气囊7安装在碳纤维骨架上,既能节能,也从不同的位置和方向保护了无人机本体1。
在气囊模块上设有电子皮肤系统和气阀,本实施例中,电子皮肤系统为电容式皮肤系统,包括检测电路和与检测电路电连接的电极,电极能够与接近的导体构成电容,并将用于表征电容或其变化量的电信号传输至检测电路,检测电路用于将表征电容或其变化量的电信号转换为电容值或其变化量的电信号,从而能够检测障碍物或外部物体距离气囊模块的距离,控制器能够更好地调整无人机本体1的飞行,或者充放气以改变气囊模块的体积,以免发生碰撞。
在电子皮肤系统上还设有与控制器通信连接的力触觉感知传感器和张力传感器,当发生碰撞时,力触觉感知传感器能够感知碰撞的位置和强度,控制器从而调整多功能气囊旋翼无人机系统,张力传感器能够感知气囊模块的表面张力,控制器从而可以获得内部气体的压强、气囊的体积,实现对气囊模块体积的反馈控制。
多功能气囊旋翼无人机系统还包括与控制器通信连接的环境探测器,环境探测器包括超声波测距传感器、红外传感器和激光雷达等探测器,能够检测外部环境和障碍物,与电子皮肤系统相配合,以便于控制器能够更好的控制多功能气囊旋翼无人机系统。
探测模块包括激光雷达、可见光云台相机、照明设备和无线通讯设备,探测模块将探测到的信息发送到地面工作人员,从而进行巡检、勘探工作等。探测模块和环境探测器搭载在碳纤维骨架上和\或无人机本体1上,
主环状骨架2为多边形,副环状骨架3为多边形,主环状骨架2的顶点和副环状骨架3的顶点通过连接骨架4连接,连接骨架4起支撑作用,各个连接骨架4的顶端相互连接组成多边形,各个连接骨架4的底端相互连接组成多边形,增加了碳纤维骨架的稳定性,连接骨架4的支撑效果也更好。
本实施例中,如图2所示,主环状骨架2和副环状骨架3为正八边形,主环状骨架2水平固定在无人机本体1上,副环状骨架3设于主环状骨架2的上方和下方,通过连接骨架4将主环状骨架2的顶点和副环状骨架3的顶点相互连接,配合气囊模块,形成碳纤维防护罩,将无人机本体1保护在防护罩内。副环状骨架3的形状较小,连接骨架4向无人机本体1的方向倾斜,碳纤维骨架的上半部分或下半部分近似成棱台、棱锥状,一定程度上减小了碳纤维防护罩的体积,也降低了碳纤维骨架对无人机本体1的飞行的影响。
在其他实施方式中,根据无人机本体1的形状以及无人机本体1的飞行环境,主环状骨架2和副环状骨架3也可以为三角形、四边形、五边形、六边形、圆形、椭圆等形状,碳纤维骨架的上半部分或下半部分近似成棱台、棱锥状或圆台、圆锥状,既能较好的保护无人机本体1,也不会导致碳纤维防护罩体积过大,影响无人机本体1在狭窄环境下的飞行。
一种多功能气囊旋翼无人机系统的控制方法,控制器根据控制方法控制多功能气囊旋翼无人机系统,如图3所示,包括以下步骤:
S1:控制器获取无人机当前信息,无人机当前信息包括无人机周围环境信息、无人机运行参数信息和气囊模块信息;由探测系统和电子皮肤系统感知无人机周围环境信息,包括障碍物与无人机系统的距离等,无人机运行参数信息包括无人机本体1的速度、高度、动力系统的参数等等,气囊模块信息包括气囊的体积、压强以及感知的碰撞信息等;
S2:基于无人机当前信息切换无人机系统的状态,如果无人机系统的状态切换为紧急保护状态或避障状态,则生成紧急保护状态或避障状态的控制指令,否则,检测无人机系统当前的工作模式,工作模式包括手动控制模式和自动控制模式;
S3:如果无人机系统处于手动控制模式,则控制器接收控制指令,执行步骤S4,否则,无人机系统处于自动控制模式,如果无人机系统的状态切换为节能状态,则生成节能状态的控制指令,否则,无人机系统的状态切换为狭窄行进状态,生成狭窄行进状态的控制指令;
S4:无人机系统执行控制指令,重复步骤S1至步骤S4。
如果无人机系统出现故障,如动力失灵等,则无人机系统的状态切换为紧急保护状态,紧急保护状态的控制指令包括对气囊模块进行充气,使气囊模块迅速膨胀包裹住无人机本体1以及各类设备,以免发生损伤;如果无人机系统发生碰撞,则无人机系统的状态切换为避障状态,避障状态的控制指令包括气囊模块向碰撞发生的位置排气,减小了气囊模块的体积,并产生与碰撞方向相反的推力,逃离障碍物;如果无人机系统的周围环境中障碍物与无人机系统的最小距离大于预设置的阈值,则任务飞行环境较宽阔,无人机系统的状态切换为节能状态,节能状态的控制指令包括对气囊模块进行充气,增加浮力,以减小能耗;如果无人机系统的周围环境中障碍物与无人机系统的最小距离小于预设置的阈值,则飞行环境较狭窄,则无人机系统的状态切换为狭窄行进状态,狭窄行进状态的控制指令包括根据障碍物与无人机系统的最小距离对气囊模块进行排气,减小气囊模块的体积,以免发生碰撞。
在手动控制模式下,控制器接收工作人员远程发送的控制指令,实现工作人员对无人机本体1的飞行和气囊模块的充放气的远程控制。
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
- 一种多功能气囊旋翼无人机系统及控制方法
- 一种复合翼垂直起降无人机旋翼模式控制方法及系统