一种动物诱捕系统和诱捕机器人
文献发布时间:2023-06-19 11:45:49
技术领域
本发明实施例涉及无源物联网技术领域,尤其涉及一种动物诱捕系统和诱捕机器人。
背景技术
目前在各个小区里都会存在流浪动物,流浪猫或流浪狗,这些流浪动物及其繁殖的后代越来越多,经常会出现抓伤咬伤人员、引发交通事故以及深夜制造大量噪声,严重影响居民的正常生活。
为了解决流浪动物扰民的情况,通常采用人工进行抓捕,并对抓捕的动物执行绝育手术,但是采用人工抓捕流浪动物费时费力、效率低且成本高昂,并且难以避免重复抓捕已绝育的流浪动物,从而进一步降低了执行效率。
发明内容
本发明实施例提供了一种动物诱捕系统和诱捕机器人,以实现对目标动物的快速准确的抓捕。
第一方面,本发明实施例提供了一种动物诱捕系统,包括:安装有环境反向散射通信AmBC阅读器的诱捕机器人、AmBC导航标签、佩戴在已抓捕过动物身上的AmBC识别标签和无线电信号发射设备;
无线电信号发射设备,用于向AmBC导航标签和AmBC识别标签发送射频信号,其中,AmBC导航标签设置在指定起点到诱捕地点的指定路径上;
AmBC导航标签,用于根据接收的射频信号进行能量采集,基于所采集的能量进行供电,并基于射频信号将保存的地址标识采用反向散射信号发送给诱捕机器人;
AmBC识别标签,用于根据接收的射频信号进行能量采集,基于所采集的能量进行供电,并基于射频信号将保存的身份标识采用反向散射信号发送给诱捕机器人;
诱捕机器人,用于根据地址标识进行导航到达诱捕地点,在诱捕地点对目标动物进行诱捕,并根据身份标识对已抓捕过动物进行识别并驱赶。
第二方面,本发明实施例提供了一种诱捕机器人,包括:诱捕笼体,与诱捕笼体滑动连接的笼门,设置在诱捕笼体内部的中央控制模块、诱捕气味散发模块、食物投放通道、笼门控制马达、标签阅读器和声光驱赶器,设置在诱捕笼体外侧的红外摄像头和可见光摄像头;
中央控制模块,用于在到达诱捕地点时控制食物投放通道向诱捕笼体内投放食物,并控制诱捕气味散发模块向外散发诱捕气味;
标签阅读器,用于对距离诱捕笼体指定范围内的已抓捕过动物身上的AmBC识别标签进行读取识别,并将读取识别的身份标识发送给中央控制模块;
中央控制模块,用于根据身份标识控制声光驱赶器产生声光驱赶信号,以对已抓捕过动物进行驱赶;
可见光摄像头,用于在光线强度达到预设强度时对诱捕地点进行拍摄,并将所获取的诱捕地点视频发送给中央控制模块;
红外摄像头,用于在光线强度未达到预设强度时对诱捕地点进行拍摄,并将所获取的诱捕地点视频发送给中央控制模块;
中央控制模块,用于根据诱捕地点视频确定存在目标动物,并且目标动物进入诱捕笼体时,控制笼门控制马达驱动笼门向下滑动并进行关闭。
在本发明实施例中,AmBC导航标签和AmBC识别标签利用从周边环境中所接收的射频信号进行能量采集,AmBC导航标签以反射无线电波的方式向诱捕机器人发送地址标识,以引导诱捕机器人到诱捕地点对动物进行诱捕,AmBC识别标签以反射无线电波的方式向诱捕机器人发送身份标识,以使诱捕机器识别出已抓捕过动物并进行驱赶,避免重复抓捕,提高抓捕效率。
附图说明
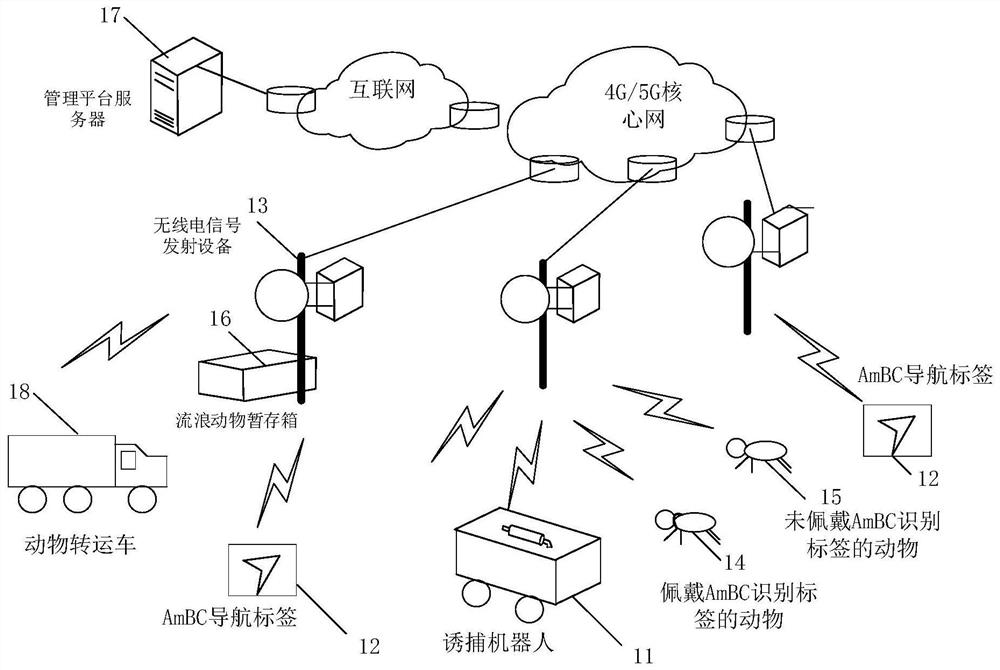
图1是本发明实施例一提供的动物诱捕系统的架构示意图;
图2是本发明实施例二提供的诱捕机器人的结构示意图;
图3是本发明实施例三提供的诱捕机器人的结构示意图。
具体实施方式
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
实施例一
图1是本发明实施例一提供的动物诱捕系统的架构示意图,该实施例可适用于对目标动物进行快速准确抓捕的情况。如图1所示,该系统具体包括:安装有环境反向散射通信(Ambient Backscattering Communication,AmBC)阅读器的诱捕机器人11、AmBC导航标签12、无线电信号发射设备13和佩戴在已抓捕过动物身上的AmBC识别标签14。
可选的,无线电信号发射设备13包括:安装有基站或无线电发射装置的智慧灯杆,本实施方式中由于是使用环境中已存在的无线电信号供AmBC导航标签12和AmBC识别标签14进行能量采集,并激活标签将所保存的信息以反射方式发送给诱捕机器人11。环境中已存在的无线电信号发射设备可以是智慧灯杆,在智慧灯杆上安装有用于产生射频信号的基站或无线电发射装置,当然无线电信号发射设备还可以是环境中已有的其它设备,本实施方式中并不对其具体类型进行限定。通过使用环境中已有的无线电信号发射设备,一方面无需额外部署和维护专用射频信号源设备,降低了整个系统的成本和功耗;另一方面也无需为该系统分配新的无线频谱,从而提高了频谱资源的利用率。
其中,无线电信号发射设备13,用于向AmBC导航标签和AmBC识别标签发送射频信号,其中,AmBC导航标签提前设置在指定地点到诱捕地点的指定路径上。AmBC导航标签12,用于根据接收的射频信号进行能量采集,基于所采集的能量进行供电,并基于射频信号将保存的地址标识采用反向散射信号发送给诱捕机器人。AmBC识别标签14,用于利用接收的射频信号进行能量采集,基于采集的能量进行供电,并基于射频信号将保存的身份标识采用反向散射信号发送给诱捕机器人。诱捕机器人11,用于根据地址标识进行导航到达诱捕地点,在诱捕地点对目标动物进行诱捕,并根据身份标识对已抓捕过动物进行识别并驱赶或者关闭笼门防止其进入诱捕笼体。
可选的,AmBC识别标签包括:AmBC脚环或AmBC项圈,对于已抓捕过的动物会进行绝育手术,并在腿部佩戴AmBC脚环或者在颈部佩戴AmBC项圈,并将该动物的身份标识保存在AmBC识别标签中。身份信息具体可以包括:动物的种类、年龄、抓捕地址或进行绝育手术的时间等。由于AmBC识别标签将身份标识调制在反射无线电信号中予以反射出去,仅需要极低的功耗,无需更换电池,因此还可采用芯片的形式植入已抓捕过的动物体内,只要能够对已抓捕过的动物进行识别都是在本申请的保护范围内,本实施方式中并不对其进行限定。
可选的,系统还包括距离智慧灯杆预设范围内的动物暂存箱16;诱捕机器人,用于按照指定路径进行返回,并将抓捕的目标动物放置在动物暂存箱内。
可选的,诱捕机器人通过标签阅读器对AmBC导航标签所发送的反向散射信号进行读取识别,并根据读取识别结果获取地址标识;用于通过标签阅读器对AmBC识别标签所发送的反向散射信号进行读取识别,并根据读取识别结果获取身份标识。
具体的说,本实施方式中的无线电信号发射设备可以对信号覆盖范围内的AmBC导航标签和AmBC识别标签通过发送射频信号的方式供其收集能量,并利用所采集的能量进行供电。由于在智慧灯杆到诱捕地点的指定路径上会提前设置多个AmBC导航标签,诱捕机器人会通过标签阅读器对AmBC导航标签所发送的反向散射信号进行读取识别,以获取AmBC导航标签所保存的地址标识,其中,地址标识具体可以是AmBC导航所在位置的经纬度。
可选的,目标动物包括:未抓捕过并且体积在预设体积范围内的动物。
需要说明的是,本实施方式中所诱捕的动物具体可以是流浪动物,例如对诱捕地点的流浪猫和流浪狗进行抓捕,因此所抓捕的目标流浪动物具体指的是,通过AmBC识别标签所识别出的未曾抓捕过的流浪动物,并且还需要体积在预设体积范围内的流浪动物,因为如果体积过小可能是鼠类或者是不适合做绝育手术的幼年猫狗。通过对目标流浪动物的体积进行限定可以进一步减小出现误抓捕的情况。当然,所诱捕的动物还可以是野生动物,或者其它指定种类的动物,本实施方式中并不对所诱捕动物的具体种类进行限定。
具体地说,本实施方式中的诱捕机器人可以按照AmBC导航标签所发送的信号确定当前位置,依据AmBC导航标签所指示的指定路径进行导航,并到达诱捕地点进行流浪动物的诱捕。由于已抓捕过流浪动物身上会佩戴AmBC识别标签,诱捕机器人可以按照AmBC识别标签所发送的身份标识,对已抓捕过并做过绝育手术的流浪动物,以及未抓捕过未做过绝育手术的流浪动物进行区分。由于从智慧灯杆到诱捕地点的指定路径都处于无线信号覆盖范围内,而智慧灯杆可以对信号覆盖范围内的AmBC导航标签和AmBC识别标签通过发送射频信号的方式供其采集能量,并根据所采集的能量进行供电,从而避免出现AmBC导航标签由于电量不足而无法对诱捕机器人进行导航,以及AmBC识别标签由于电量不足而无法对已抓捕过并做过绝育手术的流浪动物进行识别的情况。诱捕机器人设置有诱捕笼体和笼门,在到达诱捕地点后可以通过散发诱捕气味以及投放食物的方式吸引流浪动物。并且在通过标签阅读器识别到有已抓捕过的流浪动物靠近时,会向周围发射声光驱赶信号,以对已抓捕过的流浪动物进行驱赶,当确定是未抓捕过并且体积在预设范围内的流浪动物进入诱捕笼体后,会将笼门关闭以避免目标流浪动物逃跑。
可选的,系统还包括与智慧灯杆通信连接的管理平台服务器17;管理平台服务器,用于通过智慧灯杆接收动物暂存箱内所包含的目标动物的数量,在确定数量达到预设阈值时产生转运指令,并将转运指令发送给管理用户终端。
需要说明的是,本实施方式中的诱捕机器人每抓捕到一只动物则会按照AmBC导航标签的指引自动或遥控返回到智慧灯杆所位于的原出发地点,由于在距离智慧灯杆预设范围内设置有动物暂存箱16,因此诱捕机器人会将所抓捕的目标动物放置在动物暂存箱内。其中,动物暂存箱与智慧灯杆的预设距离可以设置为0.5米,本实施方式中并不限定预设距离的具体数值,并且智慧灯杆可以获取动物暂存箱内的目标动物的数量信息。由于在动物诱捕系统中还包括管理平台服务器17,管理平台服务器17可以通过4G或5G网络等通信系统与安装有基站或发射装置的智慧灯杆进行通信,因此智慧灯杆可以将所抓捕的放置在暂存箱内的目标动物的数量发送给管理平台服务器,管理平台服务器在确定数量达到预设阈值时会产生转运指令,并将转运指令进行展示;或者,将转运指令发送给管理用户终端,具体可以采用发送短信消息或者应用消息推送的方式进行发送,本实施方式中并不限定转运指令的具体发送方式。管理用户可以根据转运指令及时派遣动物转运车到达动物暂存箱位置处,并将动物暂存箱内的目标动物转运到专门的动物医院,目标动物均可在动物医院做绝育手术,做完绝育手术的动物被佩戴上AmBC识别标签后会运回诱捕地点并进行释放。在动物转运车上也设置有定位终端模块,使得管理平台服务器可以实时对动物转运车进行定位跟踪。
在本发明实施例中,AmBC导航标签和AmBC识别标签利用从周边环境中所接收的射频信号进行能量采集,AmBC导航标签以反射无线电波的方式向诱捕机器人发送地址标识,以引导诱捕机器人到诱捕地点对动物进行诱捕,AmBC识别标签以反射无线电波的方式向诱捕机器人发送身份标识,以使诱捕机器识别出已抓捕过动物并进行驱赶,避免重复抓捕,提高抓捕效率。
实施例二
图2是本发明实施例提供的诱捕机器人的结构示意图,如图2所示,诱捕机器人具体包括:诱捕笼体101,与诱捕笼体滑动连接的笼门102,设置在诱捕笼体内部的中央控制模块103、诱捕气味散发模块104、食物投放通道105、笼门控制马达106、标签阅读器107和声光驱赶器108,设置在诱捕笼体外侧的红外摄像头110和可见光摄像头118。
其中,中央控制模块103,用于在到达诱捕地点时控制食物投放通道向诱捕笼体内投放食物,并控制诱捕气味散发模块向外散发诱捕气味;
标签阅读器107,用于对距离诱捕笼体指定范围内的已抓捕过动物身上的AmBC识别标签进行读取识别,并将读取识别的身份标识发送给中央控制模块;
中央控制模块103,用于根据身份标识控制声光驱赶器产生声光驱赶信号,以对已抓捕过动物进行驱赶;
可见光摄像头118,用于在光线强度达到预设强度时对诱捕地点进行拍摄,并将所获取的诱捕地点视频发送给中央控制模块;
红外摄像头110,用于在光线强度未达到预设强度时对诱捕地点进行拍摄,并将所获取的诱捕地点视频发送给中央控制模块;
中央控制模块103,用于根据诱捕地点视频确定存在目标动物,并且目标动物进入诱捕笼体时,控制笼门控制马达驱动笼门向下滑动并进行关闭。
可选的,中央控制模块,还用于根据身份标识控制笼门控制马达驱动笼门向下滑动并关闭预设时长,以防止已抓捕过动物进入诱捕笼体。
可选的,诱捕机器人从指定起点到诱捕地点的指定路径上设置有AmBC导航标签,诱捕机器人上所安装的标签阅读器,还用于在诱捕机器人沿指定路径行进的过程中对AmBC导航标签进行读取识别,并将读取识别的地址标识发送给中央控制模块,以使中央控制模块根据地址标识进行导航。
具体的说,本实施方式中当诱捕机器人按照AmBC导航标签指引到达诱捕地点时,中央控制模块会控制食物通道向诱捕笼内投放食物,而在食物通道内用户可以提前补充所需要投放的食物,同时还会控制诱捕气味散发模块向外散发诱捕气味,以吸引流浪动物到诱捕机器人附近,并进入诱捕笼内进行觅食。
其中,当佩戴有AmBC识别标签的流浪动物在距离诱捕笼体的指定范围内活动时,标签阅读器会通过读取AmBC识别标签探测到流浪动物靠近,并将所获得身份标识发送给中央控制模块,中央控制模块根据身份标识确定靠近的流浪动物曾经抓捕过并已进行绝育手术,则会控制声光驱赶器产生声光驱赶信号,以对已抓捕流浪动物进行驱赶,另外,本实施方式中的中央控制器还会根据身份标识确定有曾经抓捕过的流浪动物靠近时,控制笼门控制马达驱动笼门向下滑动并关闭预设时长,以避免曾经抓捕过的流浪动物由于饥饿,即使在声光驱赶信号的驱赶下依然存在误闯入诱捕笼体的情况发生;在光线强度达到预设强度,例如白天,是通过可见光摄像头对诱捕地点进行拍摄获取诱捕地点视频,而在光线强度未达到预设强度,例如夜晚,是用过红外摄像头对诱捕地点进行拍摄获取诱捕地点视频。红外摄像头或可见光摄像头会将所拍摄的诱捕地点视频发送给中央控制模块,中央控制模块在确定存在目标流浪动物,即未佩戴AmBC识别标签并且体积在预设体积范围内的流浪动物进入诱捕笼体时,会控制笼门驱动马达驱动笼门向下滑动并进行关闭,以避免目标流浪动物在进食完后逃跑。
可选的,诱捕笼体内部还包括运动模块111,诱捕笼体外部底端还包括与运动模块连接的轮子;中央控制模块,还用于在根据拍摄结果确定存在目标动物,并且目标动物未进入诱捕笼体时,控制运动模块驱动轮子向目标动物所位于的方向进行移动。
需要说明的是,本实施方式中标签阅读器还可以与红外摄像头或可见光摄像头进行联动,例如,在光线强度未达到预设强度,即夜晚进行动物抓捕时间,诱捕机器人先用标签阅读器探测到指定范围,数十米乃至上百米外有动物接近时,由于一些动物喜欢结伴活动,所以在待其距离诱捕笼体指定范围时,如接近到20米范围内再用红外摄像头进行拍摄,并将拍摄到的诱捕地点视频发送给中央控制模块。中央控制模块在确定接近的动物全部为佩戴AmBC识别标签的已抓捕的动物时,则直接控制声光驱赶器产生声光驱赶信号,以对已抓捕动物进行驱赶;当确定接近的动物中同时包含佩戴AmBC识别标签的已抓捕的动物,同时也包含未佩戴AmBC识别标签并且体积在预设体积范围内的动物,并且目标动物还未进入诱捕笼时,会控制驱动模块驱动轮子向目标动物所位于的方向进行移动靠近,从而便于目标动物快速进入诱捕笼体内,以进一步提高抓捕效率。
可选的,诱捕笼体内部还包括麻醉药释放杆112和笼内摄像头113,诱捕箱内部底端还设置有体重计114;体重计114,用于获取进入诱捕笼体内的目标动物的体重值,并将体重值发送给中央控制模块;笼内摄像头113,用于对诱捕笼体内的目标动物进行拍摄,并将所获取的诱捕笼体内视频发送给中央控制模块;中央控制模块103,用于基于诱捕笼体内视频确定目标动物数量,根据目标动物的体重值和数量确定麻醉药剂量,并控制麻醉药释放杆按照确定的麻醉药剂量对目标动物进行麻醉。
具体地说,在确定目标动物已进入诱捕笼体内并且笼门关闭时,为了防止目标动物发出叫声给同类报警,还可以采用麻醉药对进入诱捕笼体内的目标动物进行麻醉,其中,麻醉药具体可以是短时麻醉气体,本实施方式中并不限定麻醉药的具体类型。为了避免麻醉药剂量过少无法进行有效麻醉,或者麻醉药剂量过多对动物造成伤害,需要精准确定麻醉药剂量。在诱捕笼体内部底端设置有体重计114,体重计114用于获取诱捕笼体内的目标动物的体重值,并将体重值发送给中央控制器;以及在诱捕笼体内部还设置有笼内摄像头113,笼内摄像头可以对诱捕笼体内的场景进行拍摄获取诱捕笼体内视频,并将诱捕笼体内视频发送给中央控制模块103,中央控制模块具体是基于诱捕笼体内视频确定目标动物数量,并根据目标动物的体重值和数量精准确定麻醉药剂量,并控制麻醉药释放杆按照所确定的麻醉药剂量对目标动物进行麻醉。
可选的,诱捕机器人内部还包括无线充电及电池模块115;无线充电及电池模块115,用于诱捕机器人从诱捕地点返回到管理平台服务器所指定的充电位置时,通过安装在充电位置处的充电设备所对应的充电接口对所述诱捕机器人进行充电,其中,充电设备包括安装有基站或无线电发射装置的智慧灯杆。
其中,本实施方式中充电设备所对应的充电接口具体可以是无线充电接口或者磁吸式接口,本实施方式中并不对充电接口的具体类型进行限定。
可选的,可见光摄像头,还用于在光线强度达到预设强度时对诱捕机器人在行进过程中的路况进行拍摄,并将所获取的路况视频发送给中央控制模块;红外摄像头,还用于在光线强度未达到预设强度时对诱捕机器人在行进过程中的路况进行拍摄,并将所获取的路况视频发送给中央控制模块。
其中,中央控制模块在获取到路况视频之后,能够自动识别诱捕机器人在行进过程中所遇到的车辆或行人,从而进行自动避让,以进一步增强诱捕机器人行进过程中的安全性。
可选的,诱捕笼体外侧还设置有通信模块109,通信模块,用于在光线强度未达到预设强度时,将红外摄像头所获取的诱捕地点视频和路况视频发送给管理平台服务器;用于在光线强度达到预设强度时,将可见光摄像头所获取的诱捕地点视频和路况视频发送给管理平台服务器;用于将笼内摄像头所获取的笼内视频发送给管理平台服务器;用于将体重计所获取的目标动物的体重值传输给管理平台服务器;用于将频率设置模块所设置的射频信号的频率发送给管理平台服务器。
具体地说,本实施方式中通信模块用于将红外摄像头以及可见光摄像头所拍摄的诱捕地点视频和路况视频、笼内摄像头所拍摄的笼体内视频、体重计所获取的体重值、频率设置模块所设置的射频信号的频率等信息发送给管理平台服务器,管理平台服务器会将所获取的信息进行展示,从而使得管理用户能够根据所展示的信息对诱捕机器人的诱捕过程进行实时监测。
在本发明实施例中,诱捕机器人能够根据标签阅读器对已抓捕过的动物进行识别并驱赶,通过体重计或笼内摄像头确定目标动物进入诱捕笼体后,将笼门关闭以避免目标动物在诱捕笼内进食后逃跑,从而避免重复抓捕,提高抓捕效率。
实施例三
图3是本发明实施例提供的诱捕机器人的结构示意图,本实施方式在第二实施例的基础上在诱捕笼体内部还增加了无线发射模块117和频率设置模块116。
其中,在诱捕机器人通过标签阅读器对AmBC导航标签进行信息读取并按照指定路径行进的过程中,或者通过标签阅读器对AmBC识别标签进行信息读取对已抓捕过动物进行身份识别的过程中,可能会存在由于高楼等障碍物的阻挡,使得AmBC导航标签或者AmBC识别标签无法接收3G、4G、5G基站或者智慧灯杆所发送的射频信号。在这种情况下诱捕机器人就无法通过标签阅读器对AmBC导航标签或AmBC识别标签进行信息读取,造成无法准确按照指定路径到达诱捕地点,更无法对动物进行识别,造成重复抓捕的情况出现。
具体的说,为了避免由于障碍物、干扰源等原因的存在而造成上述情况的出现,会通过在诱捕机器人内部设置无线发射模块117和频率设置模块116。通过无线发射模块可以向AmBC识别标签或AmBC导航标签发送射频信号,从而使得AmBC识别标签或AmBC导航标签利用所接收的射频信号进行能量采集,基于所采集的能量进行供电,并基于射频信号将保存的信息采用反射信号的形式发送给标签阅读器,因此本申请中AmBC无线发射模块117所起的作用与智慧灯杆上安装的无线发射装置相同。
其中,为了减少无线信号对环境中其它无线用户的干扰,会通过频率设置模块对AmBC无线发射模块所发射的射频信号的频率进行设置,使得无线发射模块所发射的射频信号的频率在AmBC识别标签和AmBC导航标签的工作频段内,并且频率设置模块,在进行频率设置时还会尽量选择对周边用户不产生无线电干扰的无线频段。
需要说明的是,通信模块还会将频率设置模块所设置的射频信号的频率传输给管理平台服务器,以使管理用户对AmBC无线发射模块所发射的射频信号的频率进行查看。
可选的,通信模块还用于,获取管理平台服务器所发送的指定频率,并将指定频率发送给频率设置模块,以使频率设置模块根据指定频率对无线发射模块所发射的射频信号的频率进行更新设置。
在本发明实施例中,诱捕机器人能够根据标签阅读器对已抓捕过的动物进行识别并驱赶,通过体重计或笼内摄像头确定目标动物进入诱捕笼体后,将笼门关闭以避免目标动物在诱捕笼内进食后逃跑,从而避免重复抓捕,提高抓捕效率。通过增加无线发射模块和频率设置模块,可以避免由于障碍物的阻挡,造成AmBC导航标签或者AmBC识别标签无法接收无线电发射设备所发送的射频信号,而出现导航失效和重复抓捕的情况出现。
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
- 一种动物诱捕系统和诱捕机器人
- 一种偶蹄目动物诱捕系统