一种基于纳米农药无人机喷洒的装载平台的控制方法
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及纳米农药领域,尤其涉及一种基于纳米农药无人机喷洒的装载平台的控制方法。
背景技术
纳米农药以透明液态呈现,作业现场根据亩施药量和亩施药液量直接兑水进行作业。另外,在实际病虫害防治作业中,为提高作业防治效率,针对不同的防治靶标,将一次植保作业所需的杀虫剂、杀菌剂、植物生长调节剂等科学配置在一起,无需现场桶混,直接兑水即可使用,无需使用者和烟农具有较高的专业技能和知识。2018年,中国农业科学院植保研究所完成了纳米农药航空植保专用药剂与传统农药理化性质对比实验。研究结果表明,纳米农药的分散形貌和在靶标叶面的沉积形态等多方面的表现均优于传统农药剂型。而无人机喷洒也成为了代替人工喷洒农药的主流。
而现如今的技术中,缺少一种无人机装载平台应用于纳米农药的喷洒药液,使得无法完成无人机完成连续喷洒的工作条件,而且缺少一种一体化装置,无法完成全自动化,加大人们的劳动,而且农药也会危机人们的健康。
发明内容
本发明克服了现有技术的不足,提供一种基于纳米农药无人机喷洒的装载平台的控制方法。
为达上述目的,本发明采用的技术方案为:
一种基于纳米农药无人机喷洒的装载平台,包括定位组件,所述升降组件平行设置的出口输送机,所述出口输送机平行设置的入口输送机;
所述定位组件包括定位安装板,所述定位安装板设置有定位电机,所述定位电机连接丝杆,所述丝杆设置于定位面板,所述定位面板平行设置定位底板,所述定位底板设置若干直线轴承,所述直线轴承与第一导柱配合;
所述出口输送机包括出口输送电机,所述出口输送电机连接旋转轴,所述旋转轴设置有若干链轮,所述链轮连接链条,所述链条设置有若干输送轴,所述输送轴设置有输送块;
所述入口输送机包括铝型材,所述铝型材设置有入口输送电机,所述入口输送电机连接同步轮,所述同步轮配合驱动轴,所述同步轮配合同步带。
进一步地,本发明的一个较佳实施例中,所述定位底板设置有若干第二导柱,所述第二导柱连接导向面板,所述导向面板设置有第一气缸及定位板。
进一步地,本发明的一个较佳实施例中,所述导向面板设置有质量传感器。
进一步地,本发明的一个较佳实施例中,所述出口输送电机连接框架,所述框架设置有若干导向钣金件。
进一步地,本发明的一个较佳实施例中,所述铝型材设置有压力感应块,所述压力感应块设置有压力传感器。
进一步地,本发明的一个较佳实施例中,所述铝型材还设置有钣金件及接近传感器固定块,所述钣金件连接第二气缸。
进一步地,本发明的一个较佳实施例中,所述接近传感器固定块设置有接近传感器。
此外本发明还提供了一种基于纳米农药无人机喷洒的装载平台的控制方法,应用于所述的一种基于纳米农药无人机喷洒的装载平台,具体包括以下步骤:
获取无人机的飞行信息;
根据所述无人机的飞行信息计算降落的时间、位置,得出运行信息;
将所述运行信息与预设运行信息对比,得出偏差率;
判断所述偏差率是否不大于预设偏差率阈值;
若不大于,则得出结果信息;
若大于,纠正降落的时间、位置;
将所述结果信息传输至控制器;
所述控制器启动入口输送机。
进一步地,本发明的一个较佳实施例中,还包括:
获取喷洒箱的中心位置点;
根据所述喷洒箱的中心位置点建立位置模型,得出模型信息;
根据所述的模型信息,调整无人机的起飞角度、高度,得出起飞信息;
将起飞信息传输至控制器;
所述控制器启动定位组件及出口输送机。
进一步地,本发明的一个较佳实施例中,所述无人机的飞行信息包括无人机距离装载平台的位移、无人机的中心点位置、无人机的工作状态。
本发明解决了背景技术中存在的缺陷,本发明具备以下有益效果:
(1)本方案为无人机喷洒提供了连续工作的条件,使得喷洒农药时更加高效、有序。全装置实现智能化,代替人工,减轻人们的劳动负担。
(2)本装置与配药系统共同运作,分为入口输送机与出口输送机,使得喷洒箱经过清洗、配药、兑水、搅拌等过程以后,在进行喷洒,整个流程更清晰、高效、合理。
(3)本装置的定位组件在无人机带喷洒箱飞行时,首先进行定位,使得无人机每次都能在固定位置点与喷洒箱的中心点重合,增加工作时的效率。此外,定位组件还具有充电功能,无人机可降落到指定区域可先进行充电,再进行喷洒。
附图说明
下面结合附图和实施例对本发明进一步说明。
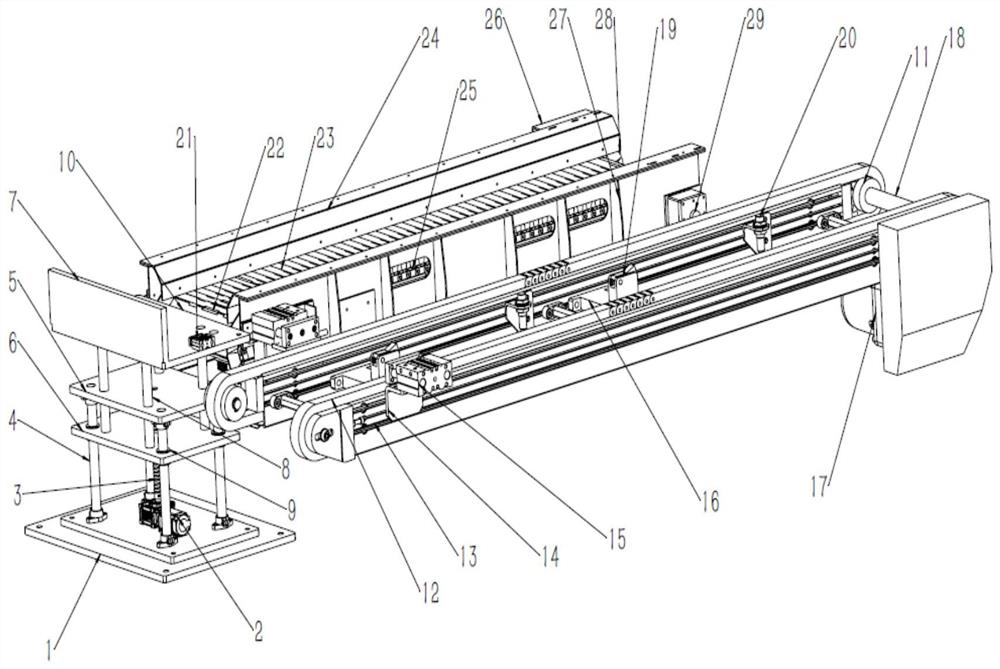
图1示出了本装置的整体结构示意图;
图2示出了定位组件的结构示意图;
图3示出了入口输送机的结构示意图;
图4示出了出口输送机的结构示意图;
图5示出了获取无人机的降落时间、位置的方法流程图;
图6示出了无人机结合喷洒箱的方法流程图;
图中:
1.定位安装板,2.定位电机,3.丝杆,4.第一导柱,5.定位面板,6.定位底板,7.定位板,8.第二导柱,9.直线轴承,10.导向面板,11.同步轮,12.同步带,13.铝型材,14.钣金件,15.第二气缸,16.压力感应块,17.入口输送电机,18.驱动轴,19.压力传感器,20.钣金件,21.第一气缸,22.输送轴,23.输送块,24.导向钣金件,25.链条,26.出口输送电机,27.框架,28.链轮,29.旋转轴。
具体实施方式
为了能够更加清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述,这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成,需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
在本申请的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本申请中的具体含义。
实施例一:
图1示出了本装置的整体结构示意图;
一种基于纳米农药无人机喷洒的装载平台,包括定位组件,所述升降组件平行设置的出口输送机,所述出口输送机平行设置的入口输送机;
所述定位组件包括定位安装板1,所述定位安装板1设置有定位电机2,所述定位电机2连接丝杆3,所述丝杆3设置于定位面板5,所述定位面板5平行设置定位底板6,所述定位底板6设置若干直线轴承9,所述直线轴承9与第一导柱4配合;
所述出口输送机包括出口输送电机26,所述出口输送电机26连接旋转轴29,所述旋转轴29设置有若干链轮28,所述链轮28连接链条25,所述链条25设置有若干输送轴22,所述输送轴22设置有输送块23;
所述入口输送机包括铝型材13,所述铝型材13设置有入口输送电机17,所述入口输送电机17连接同步轮11,所述同步轮11配合驱动轴18,所述同步轮11配合同步带12。
所述定位底板6设置有若干第二导柱8,所述第二导柱8连接导向面板10,所述导向面板10设置有第一气缸21及定位板7。
所述导向面板10设置有质量传感器。
所述出口输送电机26连接框架27,所述框架27设置有若干导向钣金件24。
所述铝型材13设置有压力感应块16,所述压力感应块16设置有压力传感器19。
所述铝型材13还设置有钣金件20及接近传感器固定块14,所述钣金件14连接第二气缸15。
所述接近传感器固定块14设置有接近传感器20。
需要说明的是,本装置与配药系统共同运作,分为入口输送机与出口输送机,使得喷洒箱经过清洗、配药、兑水、搅拌等过程以后,在进行喷洒,整个流程更清晰、高效、合理。当无人机降落时,此时无人机携带着喷洒箱,此时降落时,无人机松开喷洒箱,降落到入口输送机处,此时首先入口输送电机17带动同步轮11,进一步带动驱动轴18,从而使得同步带12运动,使得喷洒箱被同步带带动至压力传感器19处,此时压力传感器不但具有定位作用,还可以检测是否有喷洒箱通过,而此时喷洒箱在同步带上有可能是歪斜的状态。此时压力传感器19可调节喷洒箱的前进方向的歪斜程度,而到达压力传感器19的位置时,此时第二气缸15启动,进行调节前后方向的歪斜程度,从而在进入到配药系统。而且,入口输送机还设置有接近传感器20,此接近传感器20具有检测是否有喷洒箱通过,可通过此接近传感器20计算出,进入到配药系统的时间。
需要说明的是,当经过了无人机将喷洒箱放置至入口输送机之后,此时喷洒箱进入到配药系统,经历清洗、配药、兑水、搅拌等过程以后。此时,喷洒箱进入到出口输送机,出口输送机上设置有导向钣金件24,导向钣金件24的作用是,使得从配药系统中出口的喷洒箱保持一个相对与定位组件的尽可能保持平行,为无人机从定位组件处提供一个良好的起飞基础。通过出口输送电机26带动旋转轴29,进一步带动若干链轮28以及链条25旋转,使得链条25上的输送轴22带动输送块23,从而使得喷洒箱被输送块23送至定位组件,为无人机降落至定位组件带取喷洒箱提供基础。
需要说明的是,当喷洒箱从出口输送机滑出时,此时滑落至定位组件的导向面板10上部,导向面板10可设置成多个区域,一个区域为充电区域,一个区域为起飞区域,而从出口输送机滑落的喷洒箱位于起飞区域。首先可通过服务器(电脑程序)观察无人机是否有足够的电量完成此次的喷洒,当无人机的定量不足时,可首先在充电区域进行充电,而充电的时间可有服务器计算时间,当满足某一飞行条件的喷洒时,此时就会延续进行喷洒作业。当无人机位于起飞区域时,此时可说明无人机具备完成此次的喷洒作业。首先,喷洒箱从出口输送机滑出至导向面板10,此时起飞区域可以有多个喷洒箱,首先可利用起飞区域上的喷洒箱进行定位,而且在无人机起飞时,定位组件可进行调节导向面板10的高度,调节至合适的高度(即安全的起飞高度,不触碰其他东西),此时通过定位电机2带动丝杆3进行旋转,从而带动定位底板6在直线轴承9与第一导柱4的配合下进行推动导向面板10,使得导向面板移动至一定的安全高度,再进行无人机的起飞。本方案为无人机喷洒提供了连续工作的条件,使得喷洒农药时更加高效、有序。全装置实现智能化,代替人工,减轻人们的劳动负担。而且所述导向面板10设置有质量传感器。通过质量传感器可进行计算无人机的电量在飞行时是否拥有满足本次完成飞行的条件。无人机的电量是否拥有满足本次飞行的条件与天气、飞行的距离、喷洒箱中的农药的质量有关,因喷洒箱中农药的质量不一定是满容积的,如只需要喷洒一亩地,但是不需要满容积的农药。
实施例二:
此外本发明还提供了一种基于纳米农药无人机喷洒的装载平台的控制方法,应用于所述的一种基于纳米农药无人机喷洒的装载平台,具体包括以下步骤:
图5示出了获取无人机的降落时间、位置的方法流程图;
S102:获取无人机的飞行信息;
S104:根据所述无人机的飞行信息计算降落的时间、位置,得出运行信息;
S106:将所述运行信息与预设运行信息对比,得出偏差率;
S108:判断所述偏差率是否不大于预设偏差率阈值;
S110:若不大于,则得出结果信息;
S112:若大于,纠正降落的时间、位置;
S114:将所述结果信息传输至控制器;
S116:所述控制器启动入口输送机。
需要说明的是,首先通过服务器获取无人机的飞行信息,其中飞行信息包括无人机距离装载平台的位移、无人机的中心点位置、无人机的工作状态等,如无人机的工作状态可为,喷洒完成的时间,此时服务器就根据所述无人机的飞行信息计算降落的时间、位置,得出运行信息,首先先检测无人机的电量是否能完成此次的喷洒,当满足时,降落的位置点与喷洒箱的中心点一致,此时就得出一个运行信息。首先服务器计算的无人机的降落时间,与外界环境亦有关,如天气(晴天、大风天气、阴天),此时间只属于一个预测降落时间,并不是一个实际时间。此时服务器将运行信息(预测需要的时间)与预设运行信息(服务器根据天气预测的时间)对比,得出一个偏差率。当偏差率不大于预设的偏差率阈值(为定值,与天气有关,如设定在晴天的定值为1)时,则就得出一个结果信息(实际上为控制信号,控制信号在无人机接触到同步带后启动),当当偏差率大于预设的偏差率阈值时,此时纠正降落的时间、位置。此时,启动整个装载平台。本装置与配药系统共同运作,分为入口输送机与出口输送机,使得喷洒箱经过清洗、配药、兑水、搅拌等过程以后,在进行喷洒,整个流程更清晰、高效、合理。当无人机降落时,此时无人机携带着喷洒箱,此时降落时,无人机松开喷洒箱,降落到入口输送机处,此时首先入口输送电机17带动同步轮11,进一步带动驱动轴18,从而使得同步带12运动,使得喷洒箱被同步带带动至压力传感器19处,此时压力传感器不但具有定位作用,还可以检测是否有喷洒箱通过,而此时喷洒箱在同步带上有可能是歪斜的状态。此时压力传感器19可调节喷洒箱的前进方向的歪斜程度,而到达压力传感器19的位置时,此时第二气缸15启动,进行调节前后方向的歪斜程度,从而在进入到配药系统。而且,入口输送机还设置有接近传感器20,此接近传感器20具有检测是否有喷洒箱通过,可通过此接近传感器20计算出,进入到配药系统的时间。当经过了无人机将喷洒箱放置至入口输送机之后,此时喷洒箱进入到配药系统,经历清洗、配药、兑水、搅拌等过程以后。此时,喷洒箱进入到出口输送机,出口输送机上设置有导向钣金件24,导向钣金件24的作用是,使得从配药系统中出口的喷洒箱保持一个相对与定位组件的尽可能保持平行,为无人机从定位组件处提供一个良好的起飞基础。通过出口输送电机26带动旋转轴29,进一步带动若干链轮28以及链条25旋转,使得链条25上的输送轴22带动输送块23,从而使得喷洒箱被输送块23送至定位组件,为无人机降落至定位组件带取喷洒箱提供基础。当喷洒箱从出口输送机滑出时,此时滑落至定位组件的导向面板10上部,导向面板10可设置成多个区域,一个区域为充电区域,一个区域为起飞区域,而从出口输送机滑落的喷洒箱位于起飞区域。首先可通过服务器(电脑程序)观察无人机是否有足够的电量完成此次的喷洒,当无人机的定量不足时,可首先在充电区域进行充电,而充电的时间可有服务器计算时间,当满足某一飞行条件的喷洒时,此时就会延续进行喷洒作业。当无人机位于起飞区域时,此时可说明无人机具备完成此次的喷洒作业。首先,喷洒箱从出口输送机滑出至导向面板10,此时起飞区域可以有多个喷洒箱,首先可利用起飞区域上的喷洒箱进行定位,而且在无人机起飞时,定位组件可进行调节导向面板10的高度,调节至合适的高度(即安全的起飞高度,不触碰其他东西),此时通过定位电机2带动丝杆3进行旋转,从而带动定位底板6在直线轴承9与第一导柱4的配合下进行推动导向面板10,使得导向面板移动至一定的安全高度,再进行无人机的起飞。本方案为无人机喷洒提供了连续工作的条件,使得喷洒农药时更加高效、有序。全装置实现智能化,代替人工,减轻人们的劳动负担。而且所述导向面板10设置有质量传感器。通过质量传感器可进行计算无人机的电量在飞行时是否拥有满足本次完成飞行的条件。无人机的电量是否拥有满足本次飞行的条件与天气、飞行的距离、喷洒箱中的农药的质量有关,因喷洒箱中农药的质量不一定是满容积的,如只需要喷洒一亩地,但是不需要满容积的农药。
图6示出了无人机结合喷洒箱的方法流程图;
S202:获取喷洒箱的中心位置点;
S204:根据所述喷洒箱的中心位置点建立位置模型,得出模型信息;
S206:根据所述的模型信息,调整无人机的起飞角度、高度,得出起飞信息;
S208:将起飞信息传输至控制器;
S210:所述控制器启动定位组件及出口输送机。
需要说明的是,该装置还可设置一些接近传感器,服务器通过该装置的接近传感器获取喷洒箱的中心位置点,如同接近传感器获取再三维空间中喷洒箱的极限位置点,分别是长度方向、宽度方向,从而计算出长度的距离、宽度的距离,两者的连线的交点即为中心点,此时就服务器就根据所述喷洒箱的中心位置点建立位置模型,得出模型信息;服务器根据所述的模型信息,调整无人机的起飞角度、高度,得出起飞信息;因此,服务器将起飞信息传输至控制器。控制器就启动定位组件。首先可利用起飞区域上的喷洒箱进行定位,而且在无人机起飞时,定位组件可进行调节导向面板10的高度,调节至合适的高度(即安全的起飞高度,不触碰其他东西),此时通过定位电机2带动丝杆3进行旋转,从而带动定位底板6在直线轴承9与第一导柱4的配合下进行推动导向面板10,使得导向面板移动至一定的安全高度,再进行无人机的起飞。本方案为无人机喷洒提供了连续工作的条件,使得喷洒农药时更加高效、有序。全装置实现智能化,代替人工,减轻人们的劳动负担。而且所述导向面板10设置有质量传感器。通过质量传感器可进行计算无人机的电量在飞行时是否拥有满足本次完成飞行的条件。无人机的电量是否拥有满足本次飞行的条件与天气、飞行的距离、喷洒箱中的农药的质量有关,因喷洒箱中农药的质量不一定是满容积的,如只需要喷洒一亩地,但是不需要满容积的农药。
以上依据本发明的理想实施例为启示,通过上述的说明内容,相关人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定技术。
- 一种基于纳米农药无人机喷洒的装载平台的控制方法
- 一种基于Leader-Follower的无人机编队农药喷洒系统及其控制方法