一种无人机
文献发布时间:2023-06-19 11:47:31
技术领域
本发明属于无人机外形设计技术领域,尤其是一种无人机。
背景技术
对于小型固定翼无人机,通常采用方向舵控制其偏航,采用升降舵控制其俯仰,采用副翼控制其滚转运动。而对于小型固定翼无人机,当飞机副翼发生偏转时,飞机实现滚转运动,机翼的气动扭转载荷很大,可能造成机翼的变形过大,造成机翼结构的破坏,或者造成副翼功能失效等危险状况。
因此,对于小型固定翼无人机,需要研发一种新型的固定翼无人机,其飞行姿态控制采用新型控制方案,替换传统的舵面,能避免机翼的扭转载荷过大对机翼结构造成损伤等一系列问题。
发明内容
鉴于常规小型固定翼无人机,其滚转控制通常采用差动副翼实现。但在实际应用中,通过差动副翼控制飞行器滚转的同时,一个无法避免的问题出现,那即是机翼受到的气动载荷,给机翼带来巨大的扭转力矩。而过大的机翼扭转力矩,会导致机翼产生气动发散或者机翼过大变形而造成结构破坏。因此,本发明提出了一种无人机,其创新布局包括取消传统的副翼舵面、在机翼的翼尖两端安装双副发动机,采用V尾替换传统固定翼无人机的水平尾翼和垂尾。
具体技术方案如下:
一种无人机,包括机身和机翼,所述机翼左右两端分别安装左副发动机和右副发动机,所述左副发动机和右副发动机上均设置螺旋桨;所述机翼左右两端翼梢端部分别设立左翼尖小翼和右翼尖小翼;
所述机翼的中间安装机头发动机,所述机头发动机上设置螺旋桨;
所述机身包括左连接部件和右连接部件,在机身的后端设立V尾,所述V尾上安装机尾副发动机,所述机尾副发动机上设置螺旋桨。
优选地,所述V尾的形状为V型,V尾所在的平面与机身垂直,左右两侧分别与左连接部件和右连接部件固定连接。
优选地,所述左副发动机和右副发动机位于机翼两端正前方,距离机翼翼梢5~10cm。
优选地,所述左翼尖小翼和右翼尖小翼位于机翼两端延长线方向。
优选地,所述机翼与机身之间的倾斜角度为5~10度。
相对于现有技术,本发明所述的一种无人机具有以下优势:
本发明提出的一种无人机,采用V尾控制飞行器的滚转运动,取消传统的副翼舵面,从根本上避免了由于过大的扭转力矩导致副翼失效或者副翼反效的问题,从而导致飞行事故发生;通过在机翼两侧翼尖安装发动机,当两侧的发动机转速不同时,产生不同大小的力,从而产生偏航力矩,实现飞行器的偏航;分别在机头和机尾副安装发动机,作为飞行的主要推力来源,当飞机有四个电机同时做功时,每个电机负荷比传统单发动机的电机负荷小,最终实现四个发动机的效率提升。
附图说明
图1为本发明提出的一种无人机的俯视图;
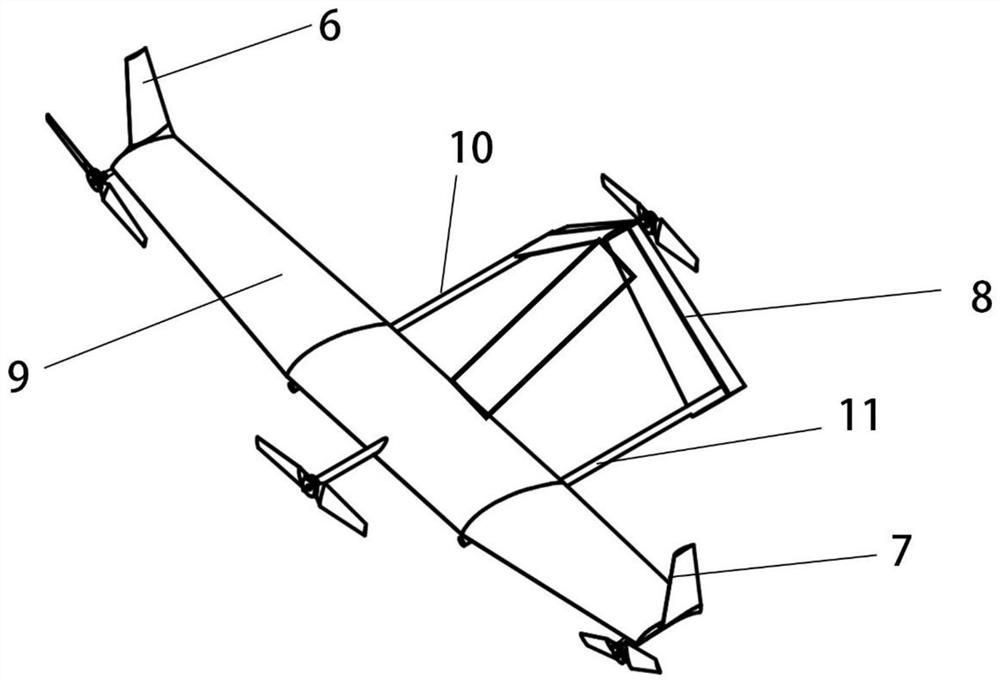
图2为本发明提出的一种无人机的等轴侧图;
图3为本发明提出的一种无人机的正视图。
附图标记说明:
1、左副发动机,2、机头发动机,3、右副发动机,4、机尾副发动机,
5、机身,6、左翼尖小翼,7、右翼尖小翼,8、V尾,9、机翼,
10、左连接部件,11、右连接部件
具体实施方式
以下结合具体实施方式进一步详细说明本发明的技术方案。应当理解,此处描述的具体实施方式仅仅用以解释本发明,并不用于限定本发明。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接连接,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
下面将参考附图并结合实施例来详细说明本发明。
如图1和图2所示,本发明提出了一种无人机,包括机身5和机翼9,所述机翼9左右两端正前方5~10cm处分别安装左副发动机1和右副发动机3,所述左副发动机1和右副发动机3上设置螺旋桨;所述机翼9左右两端翼梢端部,即机翼9两端延长线方向,分别设立左翼尖小翼6和右翼尖小翼7。所述机翼9的中间安装机头发动机2,所述机头发动机2上设置螺旋桨;
所述机身5包括左连接部件10和右连接部件11,在机身5的后端设立V尾8,所述V尾8的形状为V型,V尾8所在的平面与机身5垂直,左右两侧分别与左连接部件10和右连接部件11固定连接,所述V尾8上安装机尾副发动机4,所述机尾副发动机4上设置螺旋桨。
在本发明中,所述机翼9与机身5之间的倾斜角度为5~10度。即所述机翼9为上反角设计,其上反角的的角度范围为5~10度,其机翼的上反角可以为飞行器的滚转提供自修正力矩,即为抵消飞机因偏航产生的滚转力矩。
该种布局的新型飞行器,有别于传统的固定翼飞行器,包括采用在翼尖安装两个发动机,通过飞行器机翼两侧的发动机转速不同,牵引力不同,使飞行器受到一沿立轴方向的力矩,从而实现与方向舵相同的功能控制;而飞行器的滚转和俯仰姿态控制,通过V尾设计实现,V尾的设计能为飞行器提供滚转力矩;机头和机尾副安装两个主发动机,用于给飞行器提供主要推力。
为了实现上述目的,本发明采用了如下的设计方案,实现其工程应用的目的:
一种无副翼四发动机无人机外形布局包括左副发动机1,机头主发动机2,右副发动机3,机尾副主发动机4,机身5,左翼尖小翼6,右翼尖小翼7,V尾8,机翼9。
所述的左副发动机1安装于机翼9的左翼梢位置,右副发动机3安装于机翼9的右翼梢位置,其中,为了保证结构的强度和安装的稳定性,安装位置距离翼梢5-10cm。
所述的左、右副发动机1和3,其推力各占总推力的1/8,通过控制发动机转速的不同,即为左、右副发动机的差动控制(推力控制),进而获得偏航力矩,实现飞行器的航行转变。
所述的左、右副发动机1和3,通过螺旋桨的转动,不仅能有效阻止翼尖分离涡产生,而且有效遏制翼梢流动分离,从而减小了机翼的诱导阻力。
所述的左翼尖小翼6和右翼尖小翼7安装在翼梢端部,翼尖小翼的主要用途为阻止气流从机翼下表面流动到上表面,防止飞行器在飞行中,从机翼翼尖部位产生分离涡,造成机翼的升力下降,机翼阻力增加,降低飞行器的空气动力学性能。
所述的机翼9为上反角设计,其上反角的角度范围为5-10度,其机翼的上反角可以为飞行器的滚转提供自修正力矩,即为抵消飞机因偏航产生的滚转力矩。
所述的机头主发动机2安装于飞行器的机头部位,所述的机尾副发动机4安装于V尾部分,其推力各占总推力的5/8和1/8。此种动力匹配方案,能实现最大的动力分配能效比。一方面,在飞行器飞行时,通过控制两台推力较小的发动机,能实现飞行器偏航的控制;另一方面,将主推力安装在机头,并且在机尾安装辅助推力的副发动机,能保证整机的稳定性控制,防止在飞行中出现荷兰滚、螺旋等紧急情况,引发不可改变的飞行安全。
所述的V尾安装在左右连接件10,11上,其主要功能是作为升降舵,控制飞行器的俯仰运动。
所述的左右连接件10,11,前端固连在机翼的下部,后端连接在V尾。
综上所述,本发明提出的一种无人机,其特征主要和优点主要有以下三点:1.采用V尾控制飞行器的滚转运动,取消的传统的副翼舵面,从根本上避免了由于过大的扭转力矩导致副翼失效或者副翼反效的问题,从而导致飞行事故发生;2.通过在机翼两侧翼尖安装发动机,当两侧的发动机转速不同时,产生不同大小的力,从而产生偏航力矩,实现飞行器的偏航。采用此种控制方案,一方面可以取代传统方向舵和垂尾,另一方面,两侧螺旋桨所产生的涡流会干扰和打乱翼尖涡,能有效的减小诱导阻力;3.分别在机头和机尾副安装发动机,作为飞行的主要推力来源,当飞机有四个电机同时做功时,每个电机负荷比传统单发动机的电机负荷小,最终实现四个发动机的效率提升。
以上的实施方式均为本发明的优选实施方式,并非因此限制本发明的专利保护范围。任何本发明所属的技术领域的技术人员,在不脱离本发明所公开的精神和范围的前提下,对本发明的内容所做的等效结构与等效步骤的变换均落入本发明要求保护的专利范围之内。
- 无人机系统、无人机、移动体、划分部件、无人机系统的控制方法和无人机系统控制程序
- 无人机系统、无人机、移动体、无人机系统的控制方法和无人机系统控制程序