一种可垂直起降的涵道扇翼无人机及其控制方法
文献发布时间:2023-06-19 11:54:11
技术领域
本发明属于无人机的技术领域,具体涉及一种可垂直起降的涵道扇翼无人机及其控制方法。
背景技术
扇翼飞行器作为一种新概念飞行器,因其飞行效率高、载荷大、结构简单、可短距起降的优点,在军事及民用领域获得了较大的发展优势,逐步成为了飞行器领域新的研究热点。一种载重更大、控制效率更高、可垂直起降的新型布局形式对扇翼机的推广应用尤为重要。
为了减少对起降场地的依赖、降低使用成本、执行多样化的飞行任务,可垂直起降的飞行器一直是航空领域的研究重点。传统两轴扇翼飞行器在两个机翼上面加装两个横流风扇,风扇的转动为飞行器提供必要的升力和推力,这样独特的原理和构型使得扇翼机相较于普通固定翼飞行器,具有更高的飞行效率、更好的低速性能以及更大的载重。但这种构型的扇翼机由于只有两个横流风扇所以其载重有限;并且,为了减轻对扇翼尾部气流的干扰,机身一般较短,这样就进一步限制了其载重能力;另外,为了对飞行器进行姿态控制就不得不增加水平外翼和尾翼等部件,无形中增加了飞行器气动和结构上的负担;此外这样的姿态控制方式效率和精度都比较低。
发明内容
本发明的目的在于针对现有技术中的上述不足,提供一种可垂直起降的涵道扇翼无人机及其控制方法,以解决传统两轴扇翼其载重有限、控制效率不高、精度低、短距起降能力弱、无法垂直起降的问题。
为达到上述目的,本发明采取的技术方案是:
一方面,一种可垂直起降的涵道扇翼无人机及其控制方法,其包括机身、通信模块和控制模块;位于所述机身头部的下方设置电子吊舱和起落架,机身两侧对称设置扇翼,机身尾部与平尾相连;平尾两侧对称设置可沿水平横轴旋转的涵道风扇;
两个扇翼均包括若干个驱动组件,相邻驱动组件之间通过隔板间隔隔开;驱动组件包括穿设于两个隔板之间的转动轴和若干片横流风扇,若干片横流风扇呈圆柱状均匀分布于转动轴上;转动轴与减速齿轮连接,减速齿轮通过皮带依次与传动齿轮和电动机相连。
进一步地,起落架采用前三点布局设置于机身头部的下方。
进一步地,两个扇翼的边端均安装翼尖小翼。
进一步地,扇翼的机翼翼型为高升阻比翼型。
进一步地,机身呈长条状流线型。
进一步地,涵道风扇与摇臂一端连接,摇臂另一端与连杆相连,连杆与舵机驱动连接。
进一步地,舵机位于机身内部。
进一步地,电动机和舵机通过通信模块和控制模块相连。
一方面,一种可垂直起降的涵道扇翼无人机的控制方法,包括无人机垂直起飞、垂直降落、横滚、俯仰和偏航控制。
进一步地,包括:
垂直起飞:
S1、舵机通过连杆控制涵道风扇绕水平轴倾转至垂直状态,同时启动控制扇翼与涵道风扇产生向上的推力;
S2、按阶梯增大向上的推力以克服无人机自身重力,直至无人机离地,在离地过程中通过无人机控制模块感应无人机飞行姿态,并通过调整各扇翼风扇转速、涵道风扇转速以及涵道风扇倾转角保持无人机平稳上升姿态;
S3、当无人机上升至预设的安全高度,减小涵道风扇倾转角度,使其推力向前,无人机变为平飞姿态;
垂直降落:
A1、当无人机到达预设降落区域时,控制舵机减小涵道风扇倾转角,减小无人机向前的推力,增加向上的推力,直至无人机的平飞速度降为零,无人机转为悬停状态;
A2、控制模块按阶梯减小涵道风扇、扇翼风扇的转速,减小向上推力,无人机缓慢降落至地面;
A3、且通过控制模块时刻感应并调整无人机姿态,使其平尾降落。
横滚:增大左侧扇翼风扇转速,减小右侧扇翼风扇转速,无人机将向右侧横滚;增大右侧扇翼风扇转速,减小左侧扇翼风扇转速,无人机将向左侧横滚;
俯仰:保持扇翼风扇转速不变,增大涵道风扇转速和倾转角,无人机将低头;减小涵道风扇转速和倾转角,无人机将抬头;
偏航:保持扇翼风扇转速不变,增大左侧涵道风扇的转速,减小右侧涵道风扇的转速,无人机将向右偏航;增大右侧涵道风扇的转速,减小左侧涵道风扇的转速,无人机将向左偏航
本发明提供的可垂直起降的涵道扇翼无人机及其控制方法,具有以下有益效果:
本发明无人机载荷更大、起降距离更短,通过倾转涵道风扇至一定角度可实现无人机的垂直起降,受地理限制较小;且通过单独控制每个扇翼与涵道的转速可实现精准控制无人机的姿态,控制效率、控制精度更高。
附图说明
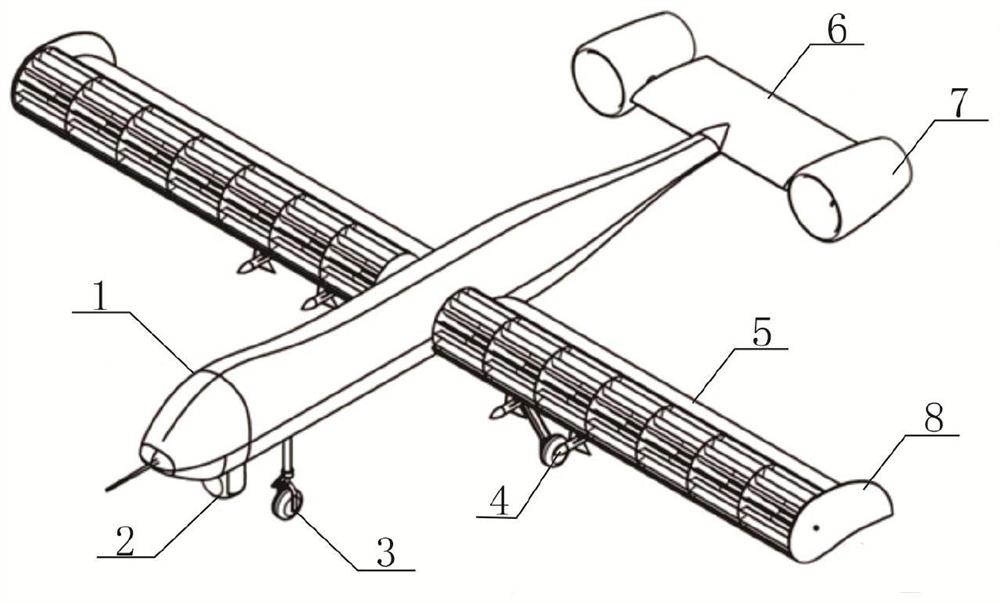
图1为可垂直起降的涵道扇翼无人机的总体布局图。
图2为可垂直起降的涵道扇翼无人机的高升阻比扇翼翼型。
图3为可垂直起降的涵道扇翼无人机的翼尖小翼。
图4为可垂直起降的涵道扇翼无人机的长条状流线型机身。
图5为可垂直起降的涵道扇翼无人机的横流风扇传动图。
图6为可垂直起降的涵道扇翼无人机的涵道风扇倾转图。
图7、8、9和10分别为可垂直起降的涵道扇翼无人机的短距起降及平飞状态下等视图与三视图。
图11为可垂直起降的涵道扇翼无人机的短距起降状态下的等视图。
其中,1、机身;2、电子吊舱;3、起落架;4、武器单元;5、扇翼;6、平尾;7、涵道风扇;8、翼尖小翼;9、横流风扇;10、电动机;11、传动齿轮;12、皮带;13、减速齿轮;14、转动轴;15、舵机;16、连杆;17、摇臂;18、隔板。
具体实施方式
下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
实施例一,参考图1-图11,本方案的可垂直起降的涵道扇翼5无人机,可垂直起降的涵道扇翼5无人机,其包括机身1、通信模块和控制模块。
其中,位于机身1头部的下方设置电子吊舱2和起落架3,机身1两侧对称设置扇翼5,机身1尾部与平尾6相连,平尾6两侧对称设置可沿水平横轴旋转的涵道风扇7。
涵道风扇7与摇臂17一端连接,摇臂17另一端与连杆16相连,连杆16与舵机15驱动连接。
涵道绕水平横轴旋转由位于机身1的舵机15驱动,舵机15通过摇臂17带动连杆16,连杆16带动与涵道固结的摇臂17,摇臂17通过水平横轴带动涵道旋转,从而实现对无人机飞行姿态的控制。
涵道风扇7整体可绕水平横轴旋转,当旋转超过90°时,无人机升力合力竖直向上,可以实现无人机的垂直起降。
两个扇翼5均包括若干个驱动组件,相邻驱动组件之间通过隔板18间隔隔开;驱动组件包括穿设于两个隔板18之间的转动轴14和若干片横流风扇9,若干片横流风扇9呈圆柱状均匀分布于转动轴14上;转动轴14与减速齿轮13连接,减速齿轮13通过皮带12依次与传动齿轮11和电动机10相连。
扇翼5内部的横流风扇9旋转不仅可以为无人机提供向上的升力,还能为其提供向前的推力;位于尾部的涵道风扇7可以为无人机提供更大的推力,当涵道风扇7水平布置时,更大的推力可以使无人机更快的起飞,实现短距起降。
每个扇翼5和每个涵道风扇7的转速可以单独控制,每个涵道风扇7绕水平横轴旋转的角度也可以单独控制。
垂直起降过程中,可以通过飞控差动控制每个扇翼5的转速、涵道风扇7的转速以及涵道风扇7绕水平横轴旋转的角度实现平稳起降。
两个扇翼5的边端均安装翼尖小翼8,减弱了翼尖扰流,减小了诱导阻力,提升了升力。
机身1呈长条状流线型。起落架3采用前三点布局设置于机身1头部的下方,扇翼5的机翼翼型为高升阻比翼型。
舵机15位于机身1内部,电动机10和舵机15通过通信模块和控制模块相连。
实施例二,垂直起飞,包括:
S1、舵机15通过连杆16控制涵道风扇7绕水平轴倾转至垂直状态(如图11所示),然后同时启动扇翼5与涵道风扇7使其产生向上的推力;
S2、逐步增大推力以克服无人机自身重力,直至无人机离地,在离地过程中通过无人机控制模块感应无人机飞行姿态,并通过调整各扇翼5风扇转速、涵道风扇7转速以及涵道风扇7倾转角保持无人机平稳上升姿态;
S3、当无人机上升至安全高度,通过减小涵道风扇7倾转角度,使其推力逐渐向前,无人机逐渐变为平飞姿态。
垂直降落:
A1、当无人机到达降落区域时,逐渐减小涵道风扇7倾转角,使无人机向前的推力减小,向上的推力增加,随后无人机的平飞速度降为零,无人机逐渐转为悬停状态;
A2、随后通过控制模块逐渐减小涵道风扇7、扇翼5风扇的转速,使其向上的推力减小,无人机缓慢降落至地面;
A3、在降落过程中,通过控制模块时刻感应并调整无人机姿态,使其平尾6降落;
横滚:在平飞过程中,通过作用两个扇翼5风扇转速的差动控制,使左右两侧扇翼5的升推力不同,以此实现无人机的滚转控制。详细的,增大左侧扇翼5风扇转速,减小右侧扇翼5风扇转速,无人机将向右侧横滚;增大右侧扇翼5风扇转速,减小左侧扇翼5风扇转速,无人机将向左侧横滚;
俯仰:通过同时控制两个涵道风扇7的转速与倾转角,使涵道风扇7产生的力的大小和方向发生改变,以此实现无人机的俯仰控制。详细的,保持扇翼5风扇转速不变,增大涵道风扇7转速和倾转角,无人机将低头;减小涵道风扇7转速和倾转角(可为负),无人机将抬头。
偏航:通过差动控制左右涵道风扇7的转速,使无人机作用两侧的作用力不同,从而实现差动控制。详细的,保持扇翼5风扇转速不变,增大左侧涵道风扇7的转速,减小右侧涵道风扇7的转速,无人机将向右偏航;增大右侧涵道风扇7的转速,减小左侧涵道风扇7的转速,无人机将向左偏航。
本发明平尾6可减少无人机平飞过程中涵道风扇7的控制力;扇翼5机翼翼型根据典型高升阻比翼型设计,更具流线型、具有较好的升力特性。且采用全电驱动,功率更大、控制效率更高;另外,全机采用无舵面构型,进一步减少了结构重量。
虽然结合附图对发明的具体实施方式进行了详细地描述,但不应理解为对本专利的保护范围的限定。在权利要求书所描述的范围内,本领域技术人员不经创造性劳动即可做出的各种修改和变形仍属本专利的保护范围。
- 一种可垂直起降的涵道扇翼无人机及其控制方法
- 一种利用涵道的尾坐式垂直起降无人机及控制方法