具有悬停能力的飞行器
文献发布时间:2023-06-19 11:55:48
相关申请的交叉引用
本专利申请要求于2018年11月28日提交的欧洲专利申请第18208981.3号的优先权,其全部公开内容通过引用合并于此。
技术领域
本发明涉及一种具有悬停能力的飞行器,例如直升机、推力换向式飞机或旋翼式螺旋桨飞机。
背景技术
众所周知,直升机通常配备有传动装置,其适于将运动从一个或多个涡轮机传递到主旋翼和/或尾旋翼,和/或从涡轮机传递到多个辅助装置(即,例如用于为机载设备的运行提供所需的动力的装置)。
这样的机械传动装置通常在减速齿轮系内采用一个或多个行星式层级(stage),其适于以足够的扭矩值和转速将动力传递到主旋翼的驱动轴。
以最简单的形式,这样的行星齿轮系减速器基本上包括:
-可围绕第一固定轴线旋转的第一齿轮,其被称为太阳齿轮;
-具有与第一轴线重合的第二轴线的第二固定齿轮,其被称为内啮合齿轮;以及
-与太阳齿轮和内啮合齿轮啮合并且可围绕各自可移动的第三轴线旋转的多个齿轮,它们被称为行星齿轮。
行星齿轮系还包括行星齿轮架,该行星齿轮架可围绕第一轴线旋转并与行星齿轮连接。
更具体地,行星齿轮可围绕与行星齿轮架的相应的销相关联的相应的第三轴线旋转,并且描述了与行星齿轮架一体地围绕第一轴线的公转运动。
行星齿轮与行星齿轮架的销之间的相对旋转通过相应的滚动主体实现,所述滚动主体在由行星齿轮一体地限定的滚道上滚动。
在已知类型的方案中,机械动力经由太阳齿轮进入行星齿轮系,并以正确的扭矩和转速经由行星齿轮架传递到旋翼轴。
在直升机的使用寿命期间,由于与太阳齿轮和内啮合齿轮的啮合和赫兹接触,行星齿轮受到疲劳应力。由于与上述滚动主体的赫兹接触,行星齿轮还受到额外的疲劳应力。
此外,由于必须减小行星齿轮的面宽度来控制传动装置的总重量并因此控制整个飞行器的总重量,因此促进了裂纹的产生。
这样的裂纹的传播可能会导致其中一个行星齿轮断裂成许多单独的部分。
这样的断裂会导致单独的行星齿轮部分与传动装置分离,然后它们可能在传动装置内部加速。
因此,存在这样的风险,即单独的行星齿轮部分突出到传动装置内部并且可能卡在干扰传动装置的其他齿轮的位置上,从而阻止了其他这些齿轮的正确运动。
在某些情况下,这可能会导致传动装置卡住的风险,结果传动装置的功能丧失。
这种功能丧失显然会产生失去直升机的风险,并且会使直升机乘客的安全处于危险之中。
行业中意识到需要尽可能地减小具有悬停能力的飞行器的传动装置的齿轮、特别是行星齿轮的分离风险。
EP-A-2551550描述了一种用于具有悬停能力的飞行器的已知类型的传动装置。
发明内容
本发明的目的是提供一种飞行器,该飞行器能够以简单且廉价的方式满足上述需求中的至少一个。
前述目的是通过权利要求1所述的具有悬停能力的飞行器来实现的。
附图说明
为了更好地理解本发明,以下通过非限制性例子并参照附图来描述优选实施方式,在附图中:
-图1示出了根据本发明制造的具有悬停能力的飞行器,特别是直升机;
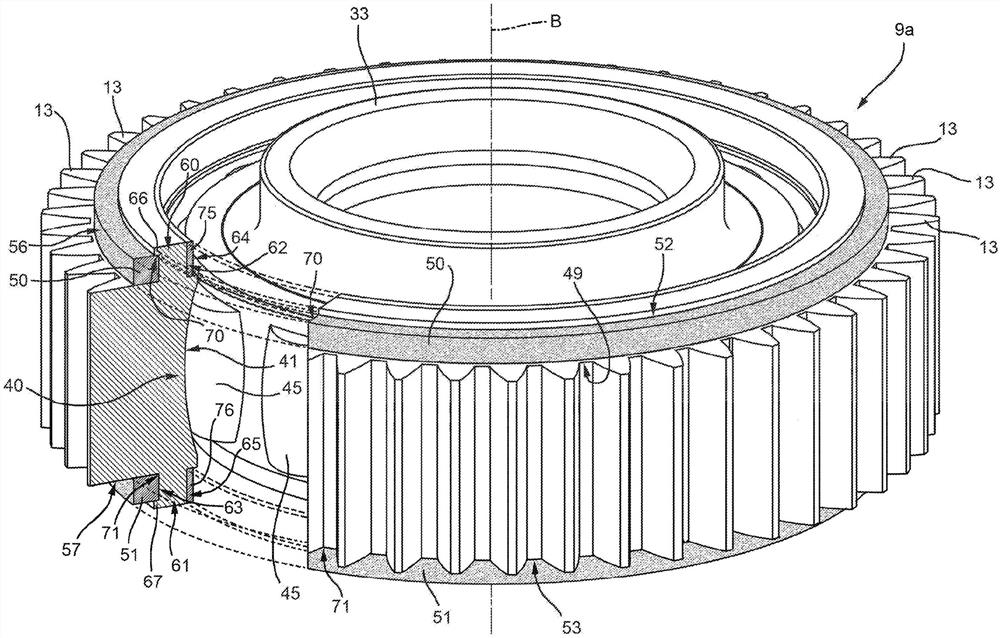
-图2以明显放大的比例示出了在图1的直升机上实现的传动装置的齿轮的立体图;
-图3是在图1的直升机上实现的传动装置的行星齿轮系的横截面;
-图4是在第一构造方案中的图2的细节的高度放大的截面图;以及
-图5是在第二构造方案中的图2的细节的高度放大的截面图。
具体实施方式
参照图1,附图标记1表示具有悬停能力的飞行器,在所示情况下为直升机。
直升机1基本上包括机身2、安装在机身2上并可在第一平面中旋转以为整个直升机产生升力的主旋翼4以及位于机身2的端部的尾旋翼3。特别地,尾旋翼3可在横向于第一平面的第二平面中旋转,以抵消由主旋翼4在机身2上产生的旋转扭矩。
直升机1还包括主传动装置5和辅助传动单元,主传动装置5适于将运动从一个或多个涡轮机10(仅示意性示出)传递到旋翼4的驱动轴11(在图1中仅示意性示出),辅助传动单元由传动装置5驱动并驱动旋翼3。
传动装置5还包括基本上由行星齿轮系6(图3)形成的最终层级,该最终层级以正确的扭矩值和角速度将动力传递到主旋翼4的轴11。
在所示的情况下,行星齿轮系6是减速行星齿轮系。
特别参照图3,行星齿轮系6基本上包括:
-太阳齿轮7,其包括多个齿14,可围绕轴线A旋转并且与层级6的输入轴(未被示出)操作地连接;
-内啮合齿轮8,其相对于轴线A在角度上是固定的并且包括多个齿12并围绕轴线A延伸;以及
-执行相应的行星齿轮9a、9b、9c、9d和9e的功能的多个齿轮,这些齿轮包括各自的多个齿13,可围绕各自的平行于轴线A的轴线B旋转,并且与太阳齿轮7和内啮合齿轮8啮合。
在所示的情况下,内啮合齿轮8的直径大于太阳齿轮7的直径。
行星齿轮系6还包括可围绕轴线A旋转的行星齿轮架30(在图3中示意性示出),行星齿轮架30与旋翼4的驱动轴11直接连接,并且与行星齿轮9a、9b、9c、9d和9e连接。
特别地,每个行星齿轮9a、9b、9c、9d和9e围绕其自身的轴线B相对于行星齿轮架30旋转,并且描述了与行星齿轮架30一起围绕轴线A的公转运动。
此外,机械动力经由太阳齿轮7进入行星齿轮系6,并以正确的扭矩值和转速经由行星齿轮架30输出至旋翼4的驱动轴11。
特别地,行星齿轮架30又包括(图3):
-可围绕轴线A旋转的平面元件31;
-沿各自的轴线B以悬臂的方式从平面元件31突出的多个销32,各个行星齿轮9a、9b、9c、9d和9e安装在所述多个销上以围绕相应的轴线B旋转;以及
-装配在各个销32上的多个管状元件33。
由于所有行星齿轮9a、9b、9c、9d和9e都是相同的,因此在下面的描述中仅参照行星齿轮9a。
同样地,由于多个销32是相同的并且多个管状元件33是相同的,因此在下面的描述中将仅参照单个销32和对应的管状元件33。
参照图2至图5,行星齿轮9a包括中空主体40,在相对于轴线A的径向位置中,齿13以悬臂的方式从该中空主体40径向突出。
此外,主体40在径向最内侧位置由与齿13径向相对的滚道41界定。
在所示的情况下,滚道41由主体40一体地限定。
在所示的情况下,滚道41是凹面。
销32和管状元件33在主体40内部延伸。管状元件33在与轴线B的相反的径向最外侧部上限定了径向面对滚道41的滚道43。
行星齿轮系6还包括插入在每个滚道41与相关的滚道43之间的多个滚动主体45。
换句话说,滚道41和43以及滚动主体45限定了滚动接触轴承,该滚动接触轴承适于将齿轮9a以能围绕轴线B旋转的方式支撑在相应的销32上。
该滚动接触轴承的径向外圈由滚道41限定,该滚道41又由行星齿轮9a的主体40一体地限定。
类似地,该轴承的径向内圈由滚道43限定,该滚道43又由行星齿轮架30的管状元件33限定。
在图4所示的情况下,主体45是与轴线B同轴的对称的球形滚子,并且滚道43是凹形的。
在图5所示的情况下,滚动主体45是自对准的双排滚子,该双排滚子各自的轴线相对于轴线B倾斜。此外,滚道43由与相应的主体45配合的两个相互会聚的凹形部分形成。
有利地,行星齿轮9a包括(图2)一对环50和51,该对环50和51彼此轴向相对并且与行星齿轮9a径向配合,从而在行星齿轮9a上施加相对于轴线B并朝向轴线B的相应的径向力。
这样,环50和51在径向方向上有效地围绕行星齿轮9a产生环箍,所述环箍在主体40内形成贯通裂纹的情况下约束可能与行星齿轮9a分离的任何部分。
环50和51不在行星齿轮9a上施加平行于轴线B的轴向力。
更具体地,环50和51通过过盈配合而安装在主体40上。
在所示的情况下,环50和51被收缩安装在主体40上。
参照图1、图4和图5,行星齿轮9a还包括一对附属部分60和61,它们彼此相对并且以悬臂的方式从主体40的相应的相互相对的侧部轴向突出。
每个附属部分60和61包括:
-限定附属部分60和61的径向外侧部的相应的环形表面62和63;
-限定附属部分60和61的径向内侧部的相应的环形表面64和65;以及
-相应的边缘66和67,其从相应的环形表面62和63在径向方向上并从与轴线B相反的一侧突出。
每个附属部分60和61限定用于相应的环50和51的相应的环形座70和71。
每个座70(71)在径向上由相关联的环形表面62(63)界定,并且在轴向上由彼此面对的主体40和相关联的边缘66(67)界定。
更详细地,环50和51具有相应的径向内表面52和53,该径向内表面52和53与相应的环形表面62和63在径向上配合并且被径向地压在相应的环形表面62和63上。
环50和51还包括各自的彼此相对的轴向侧表面54和55。表面54和55从它们的相对的侧部与主体40和相关联的边缘66和67轴向地配合。
边缘66和67轴向地约束相关联的环50和51。
环50和51还包括相应的径向外侧表面56和57。
表面56和57与相应的表面52和53相对,并且相对于齿13的径向最内圆角半径部49径向向内布置。
行星齿轮9a还包括(图3至图5)另一对环75和76,该对环75和76彼此轴向相对并且也与行星齿轮9a的主体40配合。
环75和76适于在行星齿轮9a上施加相应的力。这些力沿径向朝向B轴和远离轴线B。
特别地,环75和76通过过盈配合而安装在主体40上。
在所示的情况下,环75和76被收缩安装在主体40上。
更详细地,环75和76包括与相应的附属部分60和61的对应表面64和65配合的相应的径向外侧表面81和82。
表面64和65在相对于轴线A的径向上与相应的表面62和63相对。
表面64和65还与相应的肩部79和80轴向配合,所述肩部79和80由主体40以及相应的附属部分60和61在与相应的座70和71径向相对的一侧上限定。
环75和76适于在形成贯穿裂纹并导致行星齿轮9a、9b断裂成一个或多个部分的情况下,确保行星齿轮9a的单独的部分的对准。
滚道41在径向上插入在附属部分60和61之间。
环75和76的在相对于轴线B的径向上的厚度优选小于环50和51的在相对于轴线B的径向上的厚度。
在使用中,传动装置5将运动从涡轮机10传递到旋翼4的驱动轴11。
更详细地,动力经由围绕轴线A旋转的太阳齿轮7进入行星齿轮系6,并且经由与前述的旋翼4的驱动轴11连接的行星齿轮架30输出。
由于行星齿轮9a、9b、9c、9d和9e也经由齿13和14(图3)与固定的内啮合齿轮8啮合,因此太阳齿轮7的旋转引起行星齿轮9a、9b、9c、9d和9e围绕其轴线B的旋转以及行星齿轮9a、9b、9c、9d和9e围绕轴线A的公转。
更具体地,行星齿轮9a、9b、9c、9d和9e围绕相关的轴线B相对于行星齿轮架30的对应的管状元件33旋转。特别地,行星齿轮9a、9b、9c、9d和9e相对于管状元件33的这种相对旋转是由于插入在滚道41和43之间并在滚道41和43上滚动的滚动主体45而发生的。
行星齿轮9a、9b、9c、9d和9e还描述了与行星齿轮架30一体地围绕轴线A的公转运动。
行星齿轮架30的旋转以适当的转速将动力传递到旋翼4的驱动轴11。
疲劳应力可能在行星齿轮9a、9b、9c、9d和9e中产生裂纹。
在这种裂纹的传播导致行星齿轮9a、9b、9c、9d和9e中的一个断裂成两个或更多个单独的部分的情况下,由环50和51施加并朝向相关联的轴线B的径向力实质上降低了前述单独的部分分离的风险。
每对环75和76在各自的行星齿轮9a、9b、9c、9d和9e上施加相应的朝远离轴线B的方向上的径向力。
这样,在行星齿轮9a、9b、9c、9d和9e中的一个断裂成两个或更多个单独的部分的情况下,由相应的环75和76施加的力与边缘66和67的作用一起保持这些部分基本上平行于相对于轴线B的径向方向。因此,大大降低了这些单独的部分中的一个越过环50和51并可能以高速与行星齿轮9a、9b、9c、9d和9e的其余部分分离的风险。
在裂纹的传播不引起一个行星齿轮9a、9b、9c或9d断裂成两个单独的部分的情况下,产生相同的约束作用。
根据对根据本发明的飞行器1的检查,可以由此实现的优点是显而易见的。
特别地,行星齿轮9a、9b、9c、9d和9e包括各自的彼此轴向相对并在行星齿轮9a、9b、9c、9d和9e上施加径向力的成对的环50和51。
这样,在贯穿裂纹的传播导致行星齿轮9a、9b、9c、9d和9e中的一个断裂成两个部分的情况下,由环50和51施加并朝向轴线A的径向力防止行星齿轮与行星齿轮系6的其余部分分离。应强调的是,这种贯穿裂纹传播的风险在行星齿轮9a、9b、9c、9d和9e中特别相关,除了由与太阳齿轮7和内啮合齿轮8啮合产生的正常的疲劳载荷外,行星齿轮9a、9b、9c、9d和9e还受到由与滚动主体45的赫兹接触产生的另外的疲劳载荷的应力。
结果,大大降低了这些单独的部分突出到传动装置5内部并可能卡在干扰传动装置5的其他构件的位置上的风险。因此,大大降低了传动装置5卡住并丧失功能的风险以及随之而来的对飞行器1的机组人员安全的风险。
每个行星齿轮9a、9b、9c、9d和9e还包括彼此轴向相对的一对环75和76,其与相关联的行星齿轮9a、9b、9c、9d和9e配合,并在该行星齿轮9a、9b、9c、9d和9e上施加相应的径向朝向轴线B和远离轴线B的力。
这样,在一个行星齿轮9a、9b、9c、9d和9e断裂成两个或更多个部分的情况下,由相应的环75和76施加的力与边缘66和67的作用一起使这些部分在相对于轴线B的径向方向上保持基本上平行。
因此,大大降低了这些单独的部分中的一个越过环50和51并且可能以高速与行星齿轮9a、9b、9c、9d和9e的其余部分分离的风险。
这进一步提高了传动装置5对贯通裂纹在一个或多个行星齿轮9a、9b、9c、9d和9e内传播的容忍度。
最后,很明显,可以在不脱离本发明范围的情况下对先前描述的飞行器1进行修改和变型。
特别地,环50和51和/或75和76可以应用于太阳齿轮7和/或内啮合齿轮8,而不是应用于行星齿轮9a、9b、9c、9d和9e。替代地,可以将环50和51和/或75和76应用于行星齿轮9a、9b、9c、9d和9e以及太阳齿轮7和/或内啮合齿轮8。
此外,行星齿轮系6的内啮合齿轮8可以围绕轴线A以与太阳齿轮7不同的角速度旋转。
此外,机械动力可以以正确的扭矩值和转速经由行星齿轮架30进入行星齿轮系6并经由太阳齿轮7输出。
此外,传动装置5可以包括彼此串联或并联的两个或更多个行星齿轮系6。
此外,传动装置5可以至少部分地集成在一个涡轮机10中。
最后,传动装置5和行星齿轮系6可以用于通常称为UAV的推力换向式飞机、旋翼式螺旋桨飞机或远程驾驶的具有悬停能力的飞行器中。
- 具有悬停能力的飞行器
- 一种具有仿生翼肋形式与外形的可悬停扑翼飞行器的机翼