全自动打包装车流水线
文献发布时间:2023-06-19 11:59:12
技术领域
本发明属于打包运输技术领域,尤其涉及一种全自动打包装车流水线。
背景技术
目前,在物品打包输送技术领域中,一般在二楼用袋装打包机将待装包物品装包,然后通过一开口,使装包后物品经输送掉入开口内,并落入下层的输送带输送至装车机装车,如此实现将将一袋袋的装包物品装车;但是,在装袋后的物品在掉入开口的时候容易变形,如果通过人工装车还容易造成人身安隐患,如人工装水泥,若是箱式车,粉尘非常大,环境恶劣;且传统的打包装车机无法使装袋物品按照所需的形状摆放装车码垛,无法做到全自动,装车效率低。
发明内容
本发明的目的在于提供一种全自动打包装车流水线,旨在解决现有技术中的装袋后的物品在掉入开口的时候容易变形,且传统的打包装车机无法使装袋物品按照所需的形状摆放装车码垛的技术问题。
为实现上述目的,本发明实施例提供的一种全自动打包装车流水线,包括袋装打包机、导入输送线、车间框架、第一偏摆输送件、载体和自动装车机;所述袋装打包机、所述导入输送线和所述第一偏摆输送件均设于所述车间框架上;所述车间框架的顶面设有开口,所述第一偏摆输送件转动连接于所述开口的一端,用于承接所述导入输送线输出的输送件;所述自动装车机包括旋转移动装置、以及设于所述载体上的伸缩输送装置和升降装置;所述升降装置设于所述载体上,升降端连接所述伸缩输送装置,用于驱动所述伸缩输送装置升降;所述伸缩输送装置包括输入机构、伸缩输送机构和移动输出机构,所述输入机构设于所述伸缩输送机构的输入端,并用于承接所述第一偏摆输送件输出的输送件;所述移动输出机构设于所述伸缩输送机构的输出端,并跟随所述伸缩输送机构伸缩和升降,用于带动输送件左右移动;所述旋转移动装置在所述输入机构和所述伸缩输送机构的上方交替移动,用于夹持所述输入机构上的输送件旋转九十度、并且放置于所述伸缩输送机构上。
可选地,所述全自动打包装车流水线还包括行吊输送线,所述行吊输送线位于所述开口的底部,并与所述载体连接,用于承接所述第一偏摆输送件输出的输送件;所述行吊输送线的偏摆端与所述输入机构连接。
可选地,所述行吊输送线包括水平输送机构和与所述水平输送机构转动连接的导向输送机构,所述导向输送机构的自由端与所述输入机构连接,并跟随所述自动装车机的上下移动而摆动。
可选地,所述导向输送机构包括导向驱动件和导向输送件,所述导向输送件与所述水平输送机构转动连接;所述导向驱动件转动连接于所述水平输送机构的底部,所述导向驱动件的移动端与所述导向输送件连接。
可选地,所述自动装车机还包括整形装置,所述整形装置设于所述输入机构的输入端,用于将输送件的形状调整匀称。
可选地,所述整形装置包括若干方形辊筒,各所述方形辊筒平行间隔排布。
可选地,所述全自动打包装车流水线还包括与所述车间框架转动连接的第二偏摆输送件,所述第二偏摆输送件设于所述开口处并与所述第一偏摆输送件相对设置,用于承接所述导入输送线输出的输送件。
可选地,所述第一偏摆输送件和所述第二偏摆输送件均包括偏摆输送组件、伺服驱动电机和偏摆驱动件,所述偏摆输送组件与所述车间框架转动连接;所述伺服驱动电机与所述偏摆输送组件连接,用于驱动所述偏摆输送组件的皮带转动;所述偏摆驱动件转动连接于所述车间框架的底部,所述偏摆驱动件的移动端与所述偏摆输送组件连接。
可选地,所述旋转移动装置包括整形机构和直线驱动机构;所述输入机构叠加地设置在所述伸缩输送机构输入端的上方;所述整形机构滑动连接于所述伸缩输送机构上,并位于所述输入机构的上方,用于夹持、旋转九十度所述输入机构上的所述输送件;所述直线驱动机构设于所述伸缩输送机构上并与所述整形机构连接,用于驱动所述整形机构在所述伸缩输送机构上移动。
可选地,所述伸缩输送机构包括固定输送组件、伸缩输送组件、第一驱动组件和第二驱动组件,所述升降装置、所述伸缩输送组件、所述第一驱动组件和所述第二驱动组件均设于所述固定输送组件上;所述伸缩输送组件收容于所述固定输送组件内,并与所述固定输送组件滑动连接;所述第一驱动组件与所述固定输送组件和所述伸缩输送组件连接,用于驱动所述伸缩输送组件在所述固定输送组件内滑动;所述第二驱动组件与所述固定输送组件和所述伸缩输送组件连接,用于驱动所述伸缩输送组件的皮带和所述固定输送组件的皮带转动。
本发明实施例提供的全自动打包装车流水线中的上述一个或多个技术方案至少具有如下技术效果之一:本发明实施例的全自动打包装车流水线,袋装打包机、第一偏摆输送件和导入输送线位于车间框架的顶部,载体固定不动;袋装物品打包装车时,袋装打包机将物品打包装袋,并通过导入输送线输送至开口处;位于开口处的第一偏摆输送件承接导入输送线输送的输送件,并向下摆动将输送件输送自动装车机上;此时,移动输出机构伸入至货车车箱内,伸缩输送机构处于伸长状态,输送件输送至输入机构上,输送件经输入机构输送至旋转移动装置底部时,旋转移动装置启动,将输送件旋转九十度后朝靠近移动输出机构的方向移动,然后将输送件放置于伸缩输送机构上;输入机构的滚筒的水平高度高于伸缩输送机构的输送面的水平高度,使得输入机构与伸缩输送机构的输送面之间设有一定高度差,通过旋转移动装置对输送件旋转九十度整形和移动,避免输送件从输入机构运输至伸缩输送机构上时变形或卡料,使得输送件在运输过程可以按照所需的摆放形状输送并装车;输送件输送至伸缩输送机构上后,运输至伸缩输送机构的末端,然后运输至移动输出机构上,由于移动输出机构能够带动输送件左右移动,实现输送件在货车内自动的装车码垛,且由于设置有升降装置,实现输送件在货车内的自动层层码垛;当装好前端部分后,伸缩输送机构32组件的输送线逐渐收缩,如此,实现逐段装车。通过本发明的全自动打包装车流水线,实现输送件的自动打包、输送及装车码垛,节省了人工成本,大大地提高了装车效率。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
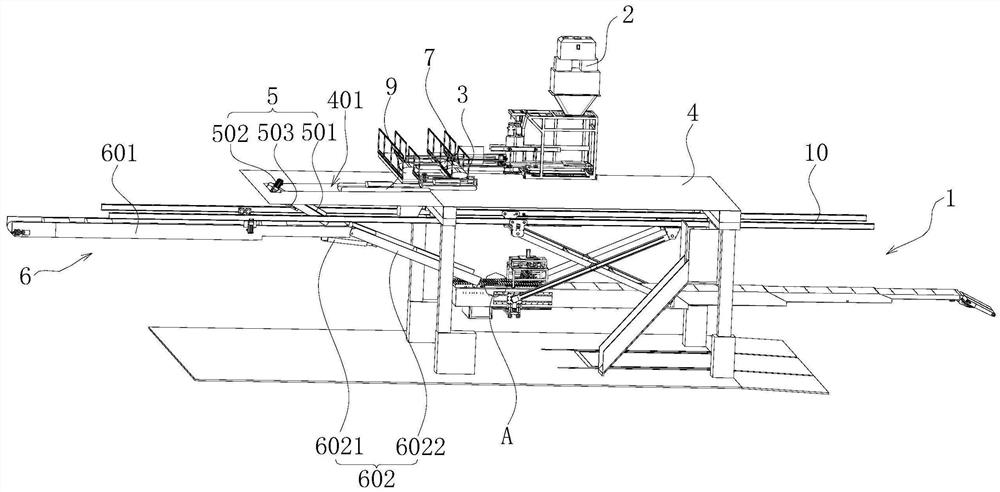
图1为本发明实施例提供的全自动打包装车流水线的结构示意图。
图2为图1中A处的放大图。
图3为本发明实施例提供的自动装车机的结构示意图。
图4为本发明实施例提供的伸缩输送机构和移动输出机构的结构示意图。
图5为图4中B处的放大图。
图6为本发明实施例提供的移动输出机构的结构示意图。
图7为本发明实施例提供的伸缩输送组件的结构示意图。
图8为本发明实施例提供的固定输送组件的结构示意图。
图9为本发明实施例提供的伸缩输送装置伸缩前、后的结构示意图。
图10为本发明实施例提供的升降装置的结构示意图。
图11为图10中C处的放大图。
图12为本发明实施例提供的升降装置另一视角下的结构示意图。
图13为本发明实施例提供的旋转移动装置的结构示意图。
图14为本发明实施例提供的整形机构的结构示意图。
图15为本发明实施例提供的夹持组件的结构示意图。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图1~15描述的实施例是示例性的,旨在用于解释本发明的实施例,而不能理解为对本发明的限制。
在本发明的一个实施例中,如图1~15所示,提供一种全自动打包装车流水线,包括袋装打包机2、导入输送线3、车间框架4、第一偏摆输送件5、载体10和自动装车机1。袋装打包机2、导入输送线3和第一偏摆输送件5均设于车间框架4上。车间框架4的顶面设有开口401,第一偏摆输送件5转动连接于开口401的一端,用于承接导入输送线3输出的输送件7。自动装车机1包括旋转移动装置20、以及设于载体10上的伸缩输送装置30和升降装置40。升降装置40设于载体10上,升降端连接伸缩输送装置30,用于驱动伸缩输送装置30升降;伸缩输送装置30包括输入机构31、伸缩输送机构32和移动输出机构33,输入机构31设于伸缩输送机构32的输入端,并用于承接第一偏摆输送件5输出的输送件7。移动输出机构33设于伸缩输送机构32的输出端,并跟随伸缩输送机构32伸缩和升降,用于带动输送件7左右移动。旋转移动装置20在输入机构31和伸缩输送机构32的上方交替移动,用于夹持输入机构31上的输送件7旋转九十度、并且放置于伸缩输送机构32上。
具体地,本发明实施例的全自动打包装车流水线,袋装打包机2、第一偏摆输送件5和导入输送线3位于车间框架4的顶部,载体10固定不动。物品打包装车时,袋装打包机2将物品打包装袋,并通过导入输送线3输送至开口401处。位于开口401处的第一偏摆输送件5承接导入输送线3输送的输送件7,并向下摆动将输送件7输送至自动装车机1上。此时,移动输出机构33伸入至货车车箱内,伸缩输送机构32处于伸长状态,输送件7输送至输入机构31上,输送件7经输入机构31输送至旋转移动装置20底部时,旋转移动装置20启动,将输送件7旋转九十度后朝靠近移动输出机构33的方向移动,然后将输送件7放置于伸缩输送机构32上。输入机构31的滚筒311的水平高度高于伸缩输送机构32的输送面的水平高度,使得输入机构31与伸缩输送机构32的输送面之间设有一定高度差,通过旋转移动装置20对输送件7旋转九十度整形和移动,避免输送件7从输入机构31运输至伸缩输送机构32上时变形或卡料,使得输送件7在运输过程可以按照所需的摆放形状输送并装车;输送件7输送至伸缩输送机构32上后,运输至伸缩输送机构32的末端,然后运输至移动输出机构33上,由于移动输出机构33能够带动输送件7左右移动,实现输送件7在货车内自动的装车码垛。且由于设置有升降装置40,实现输送件7在货车内的自动层层码垛;当装好前端部分后,伸缩输送机构32组件的输送线逐渐收缩,如此,实现逐段装车。通过本发明的全自动打包装车流水线,实现输送件7的自动打包、输送及装车码垛,节省了人工成本,大大地提高了装车效率。
进一步地,袋装打包机2为常规的设备,在此不做赘述,导入输送线3位于袋装打包机2底部,用于输送袋装打包机2打包好的输送件7,属于常规技术,在此也不做赘述。
在本发明的一个实施例中,如图1所示,全自动打包装车流水线还包括行吊输送线6,行吊输送线6位于开口401的底部,并与载体10连接,用于承接第一偏摆输送件5输出的输送件7。行吊输送线的偏摆端与输入机构连接。具体地,行吊输送线6具有两个输出端,一个为可正转和反转的水平输出端,另一个为与水平输出端连接的偏摆端。输送件7装车时,第一偏摆输送件5将输送件7输送至行吊输送线6上的水平输送端,然后输送件7输送至偏摆端,通过偏摆端将输送件7输送至自动装车机1上。
在本发明的一个实施例中,如图1所示,行吊输送线6包括水平输送机构601和与水平输送机构601转动连接的导向输送机构602,导向输送机构602的自由端与输入机构31连接,并跟随自动装车机1的上下移动而摆动。具体地,水平输送机构601呈水平设置,并位于开口401的下方,用于承接并输送第一偏摆输送件5输送的输送件7,装车时,输送件7经水平输送机构601往导向输送机构602输送,并经导向输送机构602输送至输入机构31上,在输送件7码垛过程中,导向输送机构602跟随自动装车机1的升降而摆动,确保输送件7能够输送至自动装车机1的输入机构31上上。
在本发明的一个实施例中,如图1所示,导向输送机构602包括导向驱动件6021和导向输送件6022,导向输送件6022与水平输送机构601转动连接;导向驱动件6021转动连接于水平输送机构601的底部,导向驱动件6021的移动端与导向输送件6022连接。进一步地,导向驱动件6021为油缸。具体地,输送件7装车时,导向输送件6022位于水平输送机构601的输出端,用于承接水平输送机构601输送的输送件7,导向输送件6022由于与水平输送机构601转动连接。导向输送件6022的自由端与自动装车机1连接,在自动装车机1升降移动时,通过导向驱动件6021控制导向输送件6022摆动,使导向输送件6022能够跟随自动装车机1的升降而摆动。
在本发明的一个实施例中,如图1~3所示,自动装车机1还包括整形装置8,整形装置8设于输入机构31的输入端,用于将输送件的7形状调整匀称。具体地,整形装置8位于导向输送件6022的底部,并靠近导向输送件6022的自由端,输送件7经导向输送件6022输送至整形装置8上,由于导向输送件6022在装车时呈倾斜设置,输送件7经第一偏摆输送件5和导向输送件6022输送时,输送件7受重力作用,导致料包的一头大,另一头小,形状不匀称,通过整形装置8对输送件7整形,使输送件7整体形状匀称,方便后续的码垛。
在本发明的一个实施例中,如图1~3所示,整形装置8包括若干方形辊筒801,各方形辊筒801平行间隔排。具体地,各方形辊筒801并排设置并可转动,输送件7经导向输送件6022输送至方形辊筒801上,并经各方形辊筒801滚动中整形,使输送件7整体形状匀称,方便后续的码垛。
在本发明的一个实施例中,如图1所示,全自动打包装车流水线还包括与车间框架4转动连接的第二偏摆输送件9,第二偏摆输送件9设于开口401处并与第一偏摆输送件5相对设置,用于承接导入输送线3输出的输送件7。具体地,第二偏摆输送件9位于导入输送线3的输出端,当物品经袋装打包机2打包好后需要输送至仓库时。第二偏摆输送件9向下摆动,将导入输送线3上的输送件7输送至行吊输送线6上,行吊输送线6将输送件7往远离自动装车机1的方向输送。
在本发明的一个实施例中,如图1所示,第一偏摆输送件5和第二偏摆输送件9均包括偏摆输送组件501、伺服驱动电机502和偏摆驱动件503,偏摆输送组件501与车间框架4转动连接。伺服驱动电机502与偏摆输送组件501连接,用于驱动偏摆输送组件501的皮带转动。偏摆驱动件503转动连接于车间框架4的底部,偏摆驱动件503的移动端与偏摆输送组件501连接。具体地,伺服驱动电机502用于驱动偏摆输送组件501转动,使输送至偏摆输送组件501上的输送件7可以平稳输送至水平输送机构601上,当需要将输送件7打包装车时,启动第一偏摆输送件5上的偏摆驱动件503,令对应的偏摆输送组件501向下摆动,对应的偏摆输送组件501的自由端搭接在水平输送机构601上。当需要将输送件7装仓时,启动第二偏摆输送件9上的偏摆驱动件503,令对应的偏摆输送组件501向下摆动,对应的偏摆输送组件501的自由端搭接在水平输送机构601上,此时水平输送机构601反转,反向输送输送件7。
在本发明的另一个实施例中,如图1~13所示,旋转移动装置20包括整形机构21和直线驱动机构22。输入机构31叠加地设置在伸缩输送机构32输入端的上方。整形机构21滑动连接于伸缩输送机构32上,并位于输入机构31的上方,用于夹持、旋转九十度输入机构31上的输送件7。直线驱动机构22设于伸缩输送机构32上并与整形机构21连接,用于驱动整形机构21在伸缩输送机构32上移动。具体地,整形机构21可沿伸缩输送机构32的伸缩方向滑动,直线驱动机构22位于输入机构31的下方,直线驱动机构22与整形机构21连接,提供动力驱动整形机构21沿伸缩输送机构32的伸缩方向水平移动,以实现将输送件7从输入机构31移送至伸缩输送机构32上。输入机构31在伸缩输送机构32上的输送行程小于伸缩输送机构32的输送行程,如此保证整形机构21在直线驱动机构22的驱动下将输入机构31上的输送件7移送至伸缩输送机构32上。
在本发明的另一个实施例中,如图1~14所示,整形机构21包括滑轨211、移动架212、升降组件213、旋转组件214、升降板215、固定架216和夹持组件217,滑轨211设于伸缩输送机构32上,移动架212与滑轨211滑动连接,且移动架212与直线驱动机构22连接。升降板215与移动架212滑动连接。升降组件213设于移动架212上,且升降组件213的伸缩端与升降板215连接。旋转组件214设于升降板215上,固定架216与旋转组件214的输出端连接,旋转组件214用于驱动固定架216旋转,夹持组件217设于固定架216上,用于夹持输送件7。具体地,滑轨211设于伸缩输送机构32的上端面,并沿伸缩输送机构32的长度方向延伸,滑轨211设于输入机构31的旁侧,旋转组件214的输出端穿过升降板215与固定架216连接。当输送件7经输入机构31输送至整形机构21的下方,整形机构21启动,由于升降板215与移动架212滑动连接,升降组件213驱动升降板215沿移动架212竖直下降,然后夹持组件217将输送件7夹持,升降组件213驱动升降板215竖直向上移动,使输送件7脱离输入机构31。旋转组件214驱动固定架216旋转调整输送件7的形态。旋转的角度可根据需求设定,本实施例中,旋转组件214控制固定架216旋转九十度。随后,直线驱动机构22驱动移动架212沿滑轨211移动,将输送件7输送至输入机构31外,升降组件213驱动升降板215下降,升降板215带动固定架216下降,固定板32221带动夹持组件217上的输送件7下降,夹持组件217松开对输送件7的夹持,将输送件7放置于伸缩输送机构32上,如此,完成输送件7自动化的整形。方便后续输送件7的码放。
进一步地,升降组件213包括升降气缸2131和气缸固定座2132,气缸固定座2132设于移动架212的顶部,升降气缸2131设于气缸固定座2132上,且升降气缸2131的伸缩端与升降板215连接。
进一步地,旋转组件214包括第二减速机2141、第三齿轮2142和第四齿轮2143,第二减速机2141固定连接于升降板215上,第二减速机2141的输出端穿过升降板215并与第三齿轮2142连接。第四齿轮2143与升降板215转动连接,并与固定架216固定连接,第四齿轮2143与第三齿轮2142啮合。
进一步地,直线驱动机构22包括伺服电机221、同步带222、连接件3243移动件223、第一同步轮224和第二同步轮225,伺服电机221安装于伸缩输送机构32内,第一同步轮224和第二同步轮225同一水平高度设置,并均位于输入机构31的侧端。第一同步轮224与伺服电机221的输出端连接,且第一同步轮224与第二同步轮225通过同步带222连接。连接件3243移动件223连接于同步带222上,并与移动架212固定连接。
在本发明的另一个实施例中,图13~14所示,整形机构21还包括至少一件导柱218和导套219,导柱218的底端与移动架212连接,另一端与升降板215滑动连接。导套219连接于升降板215上,并套接于导柱218之外。
在本发明的另一个实施例中,如图1~15所示,夹持组件217包括驱动件2171、连接板2172和夹板2173,驱动件2171设于固定架216上,连接板2172的一端与驱动件2171的输出端连接,另一端弯折向下穿过固定架216并与夹板2173连接。夹持组件217还包括多个间隔排布于夹板2173上的夹爪2174。输入机构31包括多个滚筒311,各方形辊筒801与各滚筒311并排,并位于各滚筒311的输入端,各滚筒311之间平行间隔设置,且相邻两滚筒311之间的间距大于夹爪2174的宽度,以避空夹爪2174。具体地,输送件7经方形辊筒801整形使输送件7整体匀称,并输入至各滚筒311上,各滚筒311转动以带动输送件7移动,对输送件7整形时,各夹爪2174分别位于相邻两滚筒311之间,避免在夹持输送件7过程中影响各滚筒311的转动,保证整形机构21和输入机构31的正常运行。
在本发明的另一个实施例中,如图1~8所示,伸缩输送机构32包括固定输送组件321、伸缩输送组件322、第一驱动组件323和第二驱动组件324,滑轨211、升降装置40、伸缩输送组件322、第一驱动组件323和第二驱动组件324均设于固定输送组件321上。伸缩输送组件322收容于固定输送组件321内,并与固定输送组件321滑动连接。第一驱动组件323与固定输送组件321和伸缩输送组件322连接,用于驱动伸缩输送组件322在固定输送组件321内滑动。第二驱动组件324与固定输送组件321和伸缩输送组件322连接,用于驱动伸缩输送组件322的皮带3322和固定输送组件321的皮带3322转动。
在本发明的另一个实施例中,如图1~8所示,第一驱动组件323包括第一电机3231、输送带3232、主动辊筒3233、第一辊筒3234、第二辊筒3235、第三辊筒3236、第四辊筒3237和第五辊筒3238,第一电机3231、主动辊筒3233、第一辊筒3234、第二辊筒3235和第五辊筒3238均设于固定输送组件321上,且第一辊筒3234和第二辊筒3235分别设于固定输送组件321的两端,第五辊筒3238设于固定输送组件321的顶部。第三辊筒3236和第四辊筒3237分别设于伸缩输送组件322的两端。第一电机3231的输出端与主动辊筒3233连接,输送带3232呈回型绕设主动辊筒3233、第一辊筒3234、第二辊筒3235、第三辊筒3236、第四辊筒3237和第五辊筒3238。
在本发明的另一个实施例中,如图1~8所示,第二驱动组件324包括第二电机3241、链条3242、连接件3243、第一链轮3244、第二链轮3245、第三链轮3246、第四链轮3247和第五链轮3248,第二电机3241、第一链轮3244、第二链轮3245和第五链轮3248均设于固定输送组件321上,且第一链轮3244和第二链轮3245分别设于固定输送组件321的两端,第五链轮3248设于第一链轮3244的上方。第三链轮3246、第四链轮3247分别设于伸缩输送组件322的两端。第二电机3241的输出端与第一链轮3244连接,链条3242呈回型绕设第一链轮3244、第二链轮3245、第三链轮3246、第四链轮3247和第五链轮3248。连接件3243连接伸缩输送组件322和链条3242。
在本发明的另一个实施例中,如图6~7所示,固定输送组件321的内侧设有导向条3211,导向条3211沿固定输送组件321的长度方向延伸。伸缩输送组件322的外侧设有滚轮导向件3221,导向条3211滑动限位于滚轮导向件3221内。导向条3211的两端延伸至固定输送组件321的两端
在本发明的另一个实施例中,如图6~7所示,滚轮导向件3221包括至少一组上下相对设置的第一滚轮32211,导向条3211限位于两第一滚轮32211之间。
在本发明的另一个实施例中,如图5~7所示,伸缩输送组件322上设有滚轮限位件3222,滚轮限位件3222穿过伸缩输送组件322的侧壁并与导向条3211滑动连接。具体地,滚轮限位件3222用于限位伸缩输送组件322在固定输送组件321上移动过程中,左右方向上的稳固,避免伸缩输送组件322左右摆动,且滚轮限位件3222与导向条3211滑动连接,避免影响伸缩输送组件322的伸缩。
在本发明的另一个实施例中,如图5~7所示,滚轮限位件3222包括固定板32221和至少一个第二滚轮32222,第二滚轮32222转动连接于固定板32221的端部,第二滚轮32222穿过伸缩输送组件322的侧壁与导向条3211抵接。
在本发明的另一个实施例中,如图2~7所示,伸缩输送组件322的底部设有凸条3223,凸条3223沿伸缩输送组件322的长度方向延伸。固定输送组件321上连接有导向辊筒件3212,导向辊筒件3212与凸条3223滑动连接。凸条3223的两端分别延伸至伸缩输送组件322的两端,通过导向辊筒件3212和凸条3223,保证伸缩输送组件322在固定输送组件321上移动的平稳。
在本发明的另一个实施例中,如图2~7所示,导向辊筒件3212包括连接杆32121和第三滚轮32122,连接杆32121与固定输送组件321连接,第三滚轮32122连接于连接杆32121的端部并与凸条3223抵接。第三滚轮32122的内侧沿径向向外延伸有挡边32123。具体地,第三滚轮32122与连接杆32121转动连接,挡边32123位于第三滚轮32122的内侧,用于限位第三滚轮32122在凸条3223上,以保证第三滚轮32122在凸条3223上移动不会脱出。
进一步地,伸缩输送组件322远离固定输送组件321的一端设有支撑架325,第一驱动组件323还包括第六辊筒3239,第六辊筒3239设于支撑架325远离伸缩输送组件322的一端,且第六辊筒3239与第五辊筒3238同一水平高度设置,输送带3232呈回型绕设主动辊筒3233、第一辊筒3234、第二辊筒3235、第三辊筒3236、第四辊筒3237、第六辊筒3239和第五辊筒3238。
在本发明的另一个实施例中,如图4~6所示,移动输出机构33包括第三驱动组件331、第四驱动组件332、两件皮带传送件332和转动连接在伸缩输送机构32输出端的安装架334。第三驱动组件331固定连接于伸缩输送机构32的底部,且第三驱动组件331的输出端与安装架334连接,第三驱动组件331用于驱动安装架334上下摆动。第四驱动组件332和两皮带传送件332均设于安装架334上,两皮带传送件332并排设置且均与安装架334滑动连接。第四驱动件2171与两皮带传送件332连接,并用于驱动两皮带传送件332在安装架334上水平移动。具体地,第三驱动组件331连接于伸缩输送组件322远离固定输送组件321的一端。当输送件7由伸缩输送机构32输送至一皮带传送件332上时,第四驱动件2171驱动该皮带传送件332移动,该皮带传送件332转动将输送件7装车,同时,另一皮带送组件332移动至伸缩输送组件322的输出端接料,如此,通过两件皮带传送件332,实现高效率码垛。码放过程中,由于安装架334与伸缩输送组件322转动连接,第三驱动组件331驱动安装架334上下摆动,从而带动两皮带传送件332上下摆动,实现输送件7的码垛,且两皮带传送件332在第四驱动组件332的驱动下可沿安装架334水平左右移动,且当一皮带传送件332上承载输送件7移动时,另一皮带传送件332移动至伸缩输送组件322的输出端,如此,提高码垛的效率,实现输送件7层层精准码放,无需人工码放,节省人力。
在本发明的另一个实施例中,如图4所示,第三驱动组件331包括电缸3311和电缸固定座3312,电缸固定座3312安装于伸缩输送组件322的底部。电缸3311固定于电缸固定座3312上,电缸3311的输出端与安装架334连接。
在本发明的另一个实施例中,如图4所示,第四驱动组件332包括第一减速机3321、皮带3322、主动轮3323和从动轮3324,第一减速机3321固定连接于安装架334的底部。主动轮3323和从动轮3324分别设于安装架334的两端,并通过皮带3322连接,主动轮3323与第一减速机3321的输出端连接。两皮带传送件332均与皮带3322连接。具体地,主动轮3323和从动轮3324通过皮带3322连接,安装架334的宽度大于伸缩输送组件322的宽度,主动轮3323和从动轮3324设置在安装架334的两侧端。
在本发明的另一个实施例中,如图4~7所示,两皮带传送件332上的辊筒均为电动辊筒3331。
在本发明的另一个实施例中,如图8~10所示,升降装置40包括第一水平驱动机构41、第二水平驱动机构42、第一摆臂43和第二摆臂44,第一摆臂43的一端与载体10转动、滑动连接,另一端与伸缩输送机构32转动连接。第二摆臂44的一端与载体10转动连接,另一端与伸缩输送机构32转动、滑动连接,且第二摆臂44和第一摆臂43转动连接。第一水平驱动机构41位于第一摆臂43旁侧,用于驱动第一摆臂43沿载体10滑动。第二水平驱动机构42设于第二摆臂44旁侧,并位于伸缩输送机构32的底部,用于驱动第二摆臂44沿伸缩输送机构32滑动。具体地,第一摆臂43和第二摆臂44的长度相同,第一摆臂43和第二摆臂44连接呈X型设置,且第一摆臂43和第二摆臂44转动连接,连接的交点为第一摆臂43和第二摆臂44的中点。又有第一摆臂43的一端与载体10转动、滑动连接,另一端与固定输送组件321转动连接、第二摆臂44的一端与载体10转动连接,另一端与固定输送组件321转动且滑动连接、第二摆臂44的一端与载体10转动连接,使得第一水平驱动机构41驱动第一摆臂43与固定输送组件321连接的一端沿固定输送组件321移动、第二水平驱动机构42驱动第二摆臂44与载体10连接的一端沿载体10移动,同时,第一摆臂43的另一端和第二摆臂44的另一端摆动,使第一摆臂43与第二摆臂44产生与剪刀类似的运动,当第一摆臂43与载体10连接的一端和第二摆臂44与载体10连接的一端逐渐靠近时,伸缩输送机构32向下移动,当第一摆臂43与载体10连接的一端和第二摆臂44与载体10连接的一端逐渐远离时,伸缩输送机构32向上移动,如此,实现伸缩输送机构32的自动升降,以满足层层码放输送件7的需求。
在本发明的另一个实施例中,如图8~10所示,第一摆臂43与载体10连接的一端转动连接有第一导向机构45,第一导向机构45包括第一移动座451、第一齿条452和限位滚轮453,限位滚轮453转动连接于第一移动座451上,并与载体10滑动连接。第一齿条452设于载体10的底部。第一水平驱动机构41包括第四电机411、第一转杆412和第一齿轮413,第四电机411与第一移动座451连接,第四电机411的输出端与第一转杆412连接,第一转杆412与第一移动座451转动连接。第一齿轮413连接于第一转杆412上并与第一齿条452啮合。具体地,限位滚轮453限位在载体10上,并在载体10上能滚动,第一齿条452沿载体10的长度方向延伸,第四电机411与第一移动座451连接,并随着第一移动座451的移动而移动。进一步地,载体10为工字钢,限位滚轮453限位在工字钢上。
在本发明的另一个实施例中,如图8和图10所示,第二摆臂44与固定输送组件321连接的一端转动连接有第二导向机构46,第二导向机构46包括第二移动座461、第二齿条462和导轨463,导轨463连接于固定输送组件321的侧端,并沿固定输送组件321的长度方向延伸,第二移动座461与导轨463滑动连接。第二齿条462设于固定输送组件321的底部。第二水平驱动机构42包括第五电机421、第二转杆422和第二齿轮423,第五电机421与第二移动座461连接,第五电机421的输出端与第二转杆422连接,第二转杆422与第二移动座461转动连接。第二齿轮423连接于第二转杆422上并与第二齿条462啮合。具体地,第二齿条462沿伸缩输送机构32的长度方向延伸,第五电机421与第二移动座461连接,并随着第二移动座461的移动而移动。
在本发明的另一个实施例中,如图8~10所示,第一摆臂43和第二摆臂44的数量均为两件,两第一摆臂43和两第二摆臂44对称设置。
在本发明的另一个实施例中,如图8和图10所示,两第一摆臂43之间设有多个间隔排布的固定条431。两第一摆臂43之间设有多个固定条431,以加强结构强度。
以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 全自动打包装车流水线
- 全自动智能出库装车流水线