一种有机肥料自动化包装装置
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及肥料领域,尤其涉及一种有机肥料自动化包装装置。
背景技术
在有机肥料的生产中,涉及到包装步骤,目前的有机肥料包装技术、工艺有多项缺陷。
第一项缺陷:现有技术的有机肥料包装精确度较差。此问题有两个原因,第一个原因是在现有的有机肥料包装中,由于肥料袋生产不可避免的误差,每个肥料袋的重量不同,如按照每个肥料袋的重量相同计算,装入有机肥料后的包装总重计算不准确,第二个原因是在现有的有机肥料包装设备中,通常通过人工从装料单元上端控制有机肥料的加入量,通常会出现加入量少于预定量,或由于人工加料控制难度大,加入量多于预定量的情况。
第二项缺陷:现有技术进行有机肥料包装时,是通过肥料包装机进行操作,当肥料袋的高度过低时,肥料袋底部无附加支撑,包装机的肥料袋夹持机构在装料时所受的力过大,容易损坏,使用寿命短,若人工辅助支撑肥料袋,则人力消耗大;且现有肥料包装机的夹具宽度固定,不便于夹持不同宽度的肥料袋。
第三项缺陷:现有的有机肥料包装设备与有机肥料生产前序操作的配合性较差,需要人工将肥料袋逐个放到包装设备的夹持机构肥料袋夹持机构,操作不方便,效率低。
第四项缺陷:现有的肥料装料技术通过在装料管下端开口处添加布管,来防止肥料装料时散发到工作环境中引起污染,但会导致部分肥料残留在布管内壁,造成浪费。
第五项缺陷:现有有机肥料包装技术对肥料袋的封口多采用线封技术,速度慢,封口效果差。
发明内容
针对上述缺陷,本发明提供一种有机肥料自动化包装装置,通过对肥料袋的精确测量和有机肥料精确装料,实现对有机肥料包装的精确控制,适用于不同高度、宽度的肥料袋,装置稳定性强,便于有机肥料包装的前序及后序操作,并在避免工作环境污染情况下减少了资源浪费;该装置能完成取袋、装料、封口、运输步骤,自动化程度高,速度快。
为了实现本发明的目的,拟采用以下技术:
一种有机肥料自动化包装装置,包括:
支架,支架包括一对竖杆和一个n型支架,竖杆上端设有固定台,固定台上下端面贯穿开设有圆孔,圆孔外周侧一侧延伸开设有方孔,固定台一侧面设有一对连杆,连杆固定于n型支架一侧面;
取袋单元,设于支架,用于获取包装并检测包装自重,取袋单元包括一对沿连杆长度方向设置的第一无杆气缸,第一无杆气缸一端设于n型支架转角内侧,一端设于竖杆内侧面,第一无杆气缸一侧滑动配合有第一滑块,第一滑块下端设有竖直设置的第一单轴直线气缸,第一单轴直线气缸输出轴设有第二单轴直线气缸,第二单轴直线气缸输出轴一端设有双活塞气缸,双活塞气缸两端各设有一对L型撑袋块,取袋单元还包括设于地面上的第一重量传感器,第一重量传感器上端面设有肥料袋框,肥料袋框内设有若干肥料袋,肥料袋的摆放方向与第二单轴直线气缸长度方向相同;
装料单元,设于支架,装料单元包括第一旋转电机、装料管,第一旋转电机设于固定台上端,第一旋转电机输出轴一端设有第一齿轮,装料管穿设于圆孔,装料管外周侧一端设有穿设于方孔的第一齿条,第一齿轮与第一齿条啮合,装料管底端外周侧设有一对第二固定板,第二固定板上端设有第三单轴直线气缸,第三单轴直线气缸输出轴一端设有C型杆,C型杆底端向装料管底部开口延伸,C型杆底端一端设有半圆板,半圆板用于阻挡有机肥料;
封口单元,设于支架下方,用于对肥料袋封口;
运输单元,设于支架下方,运输单元包括自驱动的运输车,运输车底端面设有若干第二滚轮,运输车上端面开设有凹槽,凹槽内设有第二重量传感器,第二重量传感器上端面设有装袋台。
进一步,第一单轴直线气缸输出轴一端设有第一固定板,第二单轴直线气缸设于第一固定板底端面。
进一步,L型撑袋块的厚度向相对的双活塞气缸方向延伸,L型撑袋块的一侧面为平面,用于与相对的双活塞气缸上连接的L型撑袋块匹配贴合。
进一步,肥料袋框两个相对侧面贯穿开设有若干叉槽,叉槽用于叉车叉入。
进一步,第一齿条上端设有第一限位块。
进一步,装料管底端从上到下直径减小。
进一步,封口单元包括一对设于固定台下方预定距离的双轴直线气缸,双轴直线气缸一侧面设有第二旋转电机,第二旋转电机输出轴一端设有第二齿轮,封口单元还包括设于地面上的一对第二齿条,第二齿轮和第二齿条啮合;双轴直线气缸上端设有第五固定板,一第五固定板一侧上端面设有红外加热器,红外加热器一侧面设有红外辐射板,红外辐射板一侧面设有收袋块,收袋块两侧面贯穿开设有收袋槽,另一第五固定板一侧端设有第二无杆气缸,第二无杆气缸一侧滑动配合有第二滑块,第二滑块一侧面设有厚度及高度与收袋槽匹配的压袋块,压袋块用于将肥料袋向收袋槽内压紧。
进一步,第二旋转电机一端延伸有第三固定板,第三固定板一侧面穿设有若干第一螺杆,第一螺杆用于连接第三固定板和双轴直线气缸,第二旋转电机另一端延伸有第四固定板,第四固定板上端面穿设有第二螺杆,第二螺杆用于连接第四固定板和双轴直线气缸。
进一步,双轴直线气缸一端面转动配合有转轴,转轴一端设有第一滚轮,封口单元还包括设于地面上的一对第一轮槽,第一滚轮配合于第一轮槽,第二齿条两端设有一对第二限位块。
进一步,运输单元还包括设于地面上的第二轮槽,第二轮槽一端封口,另一端设有限位板,限位板两端连接于两个第二齿条端面。
本技术方案的有益效果在于:
1、本发明可实现对有机肥料包装的精确控制:一方面,在现有的有机肥料包装中,由于肥料袋生产不可避免的误差,每个肥料袋的重量不同,如按照每个肥料袋的重量相同计算,装入有机肥料后的包装总重计算不准确,在使用本发明的装置工作时,用于放肥料袋的肥料袋框放置于第一重量传感器,在进行取袋操作前和取袋操作后,均读出第一重量传感器的读数,两个读数相减即可得到取得的肥料袋重量,这样每次取袋都可得到准确的肥料袋重量值,避免由于肥料袋的重量不同引起的包装误差;另一方面,在现有的有机肥料包装设备中,通常通过人工从装料单元上端控制有机肥料的加入量,通常会出现加入量少于预定量,或由于人工加料控制难度大,加入量多于预定量的情况,在本发明进行装袋操作时,实时监控装袋台下方的第二重量传感器读数,当第二重量传感器读数与空袋状态下第二重量传感器读数之差接近预定包装净重时,启动两个第三单轴直线气缸,拉回输出轴,使半圆板逐渐封闭装料管底端开口,使当第二重量传感器读数与空袋状态下第二重量传感器读数之差等于预定包装净重时,完全封闭装料管底端开口,完成装料,整个过程自动控制,能够实现精准装料,误差小,并且在向装料管上端开口进行人工或自动加料的两种方式,都不影响装料的准确性,因为半圆板封闭装料管底端开口后,多余的有机肥料可在装料管内暂存。
2、本发明的装置适用于不同高度、宽度的肥料袋,取袋单元的第一无杆气缸可升降用于取袋的L型撑袋块,实现对不同高度肥料袋的取袋,装料单元的第一旋转电机可通过第一齿轮带动第一齿条升降装料管,实现使用不同高度肥料袋的情况下,仍可将装料管下端开口接近肥料袋,封口单元的双轴直线气缸可调整封口机构的高度,以匹配不同高度的肥料袋;取袋单元的双活塞气缸能调整L型撑袋块撑开的宽度,以适应不同宽度的肥料袋。
3、本发明的装置较为稳定,装料管穿设于圆孔,第一齿条穿设于方孔;第一限位块和第三单轴直线气缸对第一齿轮在第一齿条上的位置起限位作用;第二限位块对第二齿轮在第二齿条上的位置起限位作用;第一轮槽对第一滚轮起限位作用;第二轮槽和限位板对第二滚轮起限位作用。若干限位机构提高装置各直线运动部分的稳定性,延长使用寿命。
4、肥料袋框两个相对侧面贯穿开设有若干叉槽,叉槽用于叉车叉入;运输单元的运输车将已完成装料及封口的肥料袋向远离本发明装料单元的方向移动。本发明便于有机肥料包装的前序及后序操作。
5、目前的肥料装料技术通过在装料管下端开口处添加布管,来防止肥料装料时散发到工作环境中引起污染,但会导致部分肥料残留在布管内壁,造成浪费,本发明的装料管可自动上下移动,直接靠近肥料袋开口,在避免工作环境污染情况下减少了资源浪费。
6、本发明采用红外热封进行肥料袋封口,并通过压袋块直线移动在红外热封时压紧肥料袋,封口速度快,效果好。
附图说明
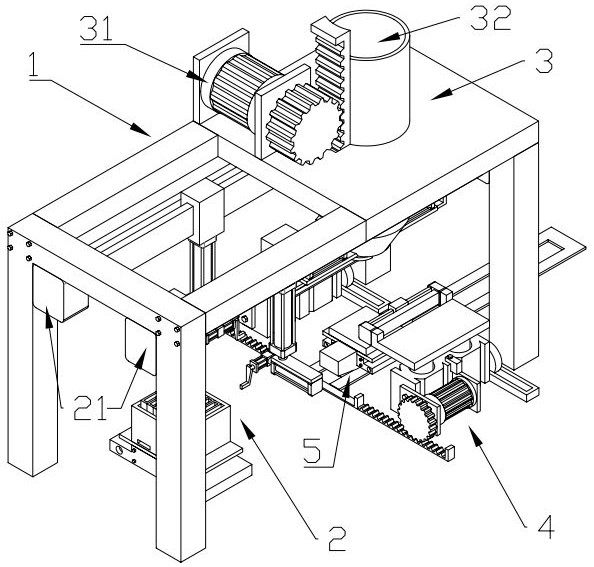
图1示出了本申请实施例整体立体图。
图2示出了本申请实施例支架立体图。
图3示出了本申请实施例取袋单元立体图。
图4示出了本申请实施例双活塞气缸、L型撑袋块立体图。
图5示出了本申请实施例装料单元、运输单元的位置关系立体示意图。
图6示出了本申请实施例装料单元立体图。
图7示出了本申请实施例装料管底部结构立体图。
图8示出了本申请实施例封口单元立体图。
图9示出了本申请实施例双轴直线气缸、第二旋转电机立体图。
图10示出了本申请实施例双轴直线气缸、第二旋转电机在另一方向的立体图。
图11示出了本申请实施例红外加热机构立体图。
图12示出了本申请实施例压袋机构立体图。
图13示出了本申请实施例运输单元立体图。
图14示出了本申请实施例运输车结构立体图。
具体实施方式
为使本申请的目的、技术方案和优点更加清楚,下面结合附图对本申请的实施方式进行详细说明,但本申请所描述的实施例是本申请一部分实施例,而不是全部的实施例。
实施例
如图1-图14所示的一种有机肥料自动化包装装置,包括支架1、取袋单元2、装料单元3、封口单元4、运输单元5。
支架1包括一对竖杆11和一个n型支架12,竖杆11上端设有固定台13,固定台13上下端面贯穿开设有圆孔131,圆孔131外周侧一侧延伸开设有方孔132,固定台13一侧面设有一对连杆14,连杆14固定于n型支架12一侧面。
取袋单元2设于支架1,用于获取包装并检测包装自重,取袋单元2包括一对沿连杆14长度方向设置的第一无杆气缸21,第一无杆气缸21一端设于n型支架12转角内侧,一端设于竖杆11内侧面,第一无杆气缸21一侧滑动配合有第一滑块211,第一滑块211下端设有竖直设置的第一单轴直线气缸22,第一单轴直线气缸22输出轴一端设有第一固定板221,第一固定板221底端面设有第二单轴直线气缸23,第二单轴直线气缸23输出轴一端设有双活塞气缸24,双活塞气缸24两端各设有一对L型撑袋块25,L型撑袋块25的厚度向相对的双活塞气缸24方向延伸,L型撑袋块25的一侧面为平面251,用于与相对的双活塞气缸24上连接的L型撑袋块25匹配贴合,设于地面上的第一重量传感器26上端面设有肥料袋框27,肥料袋框27两个相对侧面贯穿开设有若干叉槽271,叉槽271用于叉车叉入,肥料袋框27内设有若干肥料袋28,肥料袋28的摆放方向与第二单轴直线气缸23长度方向相同。
装料单元3设于支架1,装料单元3包括第一旋转电机31、装料管32,第一旋转电机31设于固定台13上端,第一旋转电机31输出轴一端设有第一齿轮311,装料管32穿设于圆孔131,装料管32外周侧一端设有穿设于方孔132的第一齿条33,第一齿条33上端设有第一限位块331,第一齿轮311与第一齿条33啮合,第一限位块331和第三单轴直线气缸34对第一齿轮311在第一齿条33上的位置起限位作用,装料管32底端从上到下直径减小,装料管32底端外周侧设有一对第二固定板321,第二固定板321上端设有第三单轴直线气缸34,第三单轴直线气缸34输出轴一端设有C型杆341,C型杆341底端向装料管32底部开口延伸,C型杆341底端一端设有半圆板343,半圆板343用于阻挡有机肥料。
封口单元4设于支架1下方,封口单元4包括一对设于固定台13下方预定距离的双轴直线气缸41,双轴直线气缸41一侧面设有第二旋转电机411,第二旋转电机411一端延伸有第三固定板412,第三固定板412一侧面穿设有若干第一螺杆4121,第一螺杆4121用于连接第三固定板412和双轴直线气缸41,第二旋转电机411另一端延伸有第四固定板413,第四固定板413上端面穿设有第二螺杆4131,第二螺杆4131用于连接第四固定板413和双轴直线气缸41,第二旋转电机411输出轴一端设有第二齿轮4111,双轴直线气缸41一端面转动配合有转轴,转轴一端设有第一滚轮42,一对第二齿条414和一对第一轮槽421设于地面上,第二齿轮4111和第二齿条414啮合,第二齿条414两端设有一对第二限位块4141,第二限位块4141对第二齿轮4111在第二齿条414上的位置起限位作用,第一滚轮42配合于第一轮槽421,第一轮槽421对第一滚轮42起限位作用;双轴直线气缸41上端设有第五固定板43,一第五固定板43一侧上端面设有红外加热器44,红外加热器44一侧面设有红外辐射板441,红外辐射板441一侧面设有收袋块45,收袋块45两侧面贯穿开设有收袋槽451,另一第五固定板43一侧端设有第二无杆气缸46,第二无杆气缸46一侧滑动配合有第二滑块461,第二滑块461一侧面设有厚度及高度与收袋槽451匹配的压袋块47,压袋块47用于将肥料袋28向收袋槽451内压紧;
运输单元5设于支架1下方,运输单元5包括自驱动的运输车51,运输车51底端面设有若干第二滚轮511,运输车51上端面开设有凹槽,凹槽内设有第二重量传感器52,第二重量传感器52上端面设有装袋台53,运输单元5还包括设于地面上的第二轮槽512,第二轮槽512一端封口,另一端设有限位板5121,限位板5121两端连接于两个第二齿条414端面,第二轮槽512和限位板5121对第二滚轮511起限位作用。
工作方式:
先在外部的肥料袋框27内放置若干肥料袋28,肥料袋28的摆放方向与第二单轴直线气缸23长度方向相同。摆放完成后,可用叉车叉入叉槽271,将肥料袋框27运送到第一重量传感器26上端面,且保持肥料袋28的摆放方向不变,读出第一重量传感器26读数。
启动两个第一无杆气缸21,移动两个第一单轴直线气缸22到肥料袋28对应位置,根据肥料袋28在肥料袋框27中的位置,启动两个第二单轴直线气缸23,调整输出轴位置,并使每个双活塞气缸24上的两个L型撑袋块25与相对双活塞气缸24上的两个L型撑袋块25两两匹配贴合,根据肥料袋28的高度,启动第一单轴直线气缸22,调整输出轴高度位置,使L型撑袋块25略低于肥料袋28上部开口的高度,同步启动两个双活塞气缸24,使每个双活塞气缸24上的两个L型撑袋块25向相反方向展开,抵住肥料袋28,启动两个第一单轴直线气缸22,用L型撑袋块25将肥料袋28带离肥料袋框27的高度,启动两个第一无杆气缸21,将肥料袋28往装料单元3方向运送,再次读出第一重量传感器26读数,前一次第一重量传感器26读数与此次第一重量传感器26读数相减,得出使用的肥料袋28的自重。
肥料袋28运送到装料管32对应的位置后,启动第一单轴直线气缸22,使肥料袋28底部放置在已经准备好的装袋台53上端面,同步启动两个双活塞气缸24,使每个双活塞气缸24上的两个L型撑袋块25向相对方向收拢,在收拢的同时,启动两个第二单轴直线气缸23,收起输出轴,两个双活塞气缸24和两个第二单轴直线气缸23将肥料袋28开口拉动为尽可能接近正方形的形状,读出第二重量传感器52。
启动第一旋转电机31,通过第一齿轮311将带有第一齿条33的装料管32下降,使装料管32底端开口略高于肥料袋28开口,向装料管32上端开口加有机肥料,在开始添加肥料前,启动两个第三单轴直线气缸34,推出输出轴,使半圆板343不阻挡装料管32底端开口,有机肥料通过装料管32装入肥料袋28时,实时监控装袋台53下方的第二重量传感器52读数,当此时第二重量传感器52读数与空袋状态下第二重量传感器52读数之差接近预定包装净重时,启动两个第三单轴直线气缸34,拉回输出轴,使半圆板343逐渐封闭装料管32底端开口,使当第二重量传感器52读数与空袋状态下第二重量传感器52读数之差等于预定包装净重时,完全封闭装料管32底端开口,完成装料。
启动两个双轴直线气缸41上各自连接的第二旋转电机411,通过啮合于第二齿条414的第二齿轮4111使两个双轴直线气缸41向相对方向移动,第一滚轮42同时也对双轴直线气缸41的移动方向起限位作用,启动双轴直线气缸41,将第五固定板43升降到对肥料袋28进行封口的预定位置,启动一第五固定板43上的第二无杆气缸46,将第二滑块461移动到一端,启动该第五固定板43下方的第二旋转电机411,带动该第二旋转电机411连接的双轴直线气缸41,使压袋块47顶入另一第五固定板43上的收袋槽451内部,此时启动第二无杆气缸46使第二滑块461移动到另一端,第二滑块461移动的同时,启动红外加热器44,红外辐射板441作用于收袋槽451内被压袋块47压紧的肥料袋28部分,使肥料袋28在收袋槽451所在高度形成直线封口。启动两个双轴直线气缸41上各自连接的第二旋转电机411,通过啮合于第二齿条414的第二齿轮4111使两个双轴直线气缸41向相反方向移动,推离封口单元4。
启动自驱动的运输车51,运输已完成装料及封口的肥料袋28向远离限位板5121的方向移动,由有机肥料后续收取工序收取已完成的肥料袋28,再启动自驱动的运输车51回到初始位置。
每个肥料袋28完成装料及封口后,记录第一重量传感器26读数,再由以上步骤依次类推,完成肥料袋框27中每个肥料袋28的取袋、装料、封口工作,再更换肥料袋框27,将已放置若干肥料袋28的外部的肥料袋框27运送到第一重量传感器26上端面进行后续操作。
本文中应用了具体个例对本申请的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本申请的技术方案及其核心思想。对于本技术领域的普通技术人员来说,在不脱离本申请原理的前提下,还可以对本申请进行若干改进和修饰,这些改进和修饰也落入本申请权利要求的保护范围内。
- 一种有机肥料自动化包装装置
- 一种生物有机肥料自动化包装机