一种旋翼无人机的喷吸气脚架
文献发布时间:2023-06-19 11:59:12
技术领域
本发明专利涉及无人机技术领域,尤其是一种旋翼无人机的喷吸气脚架。
背景技术
目前市场上的无人机大多是旋翼无人机,该类无人机抗风能力较差,且载重能力较低。无人机飞行过程中无法避免风对无人机产生的作用力,无人机在该作用力下会产生一定的倾斜,当多旋翼飞行器飞行倾斜角度超过30°时,旋翼升力骤降,会导致其加速下坠,无人机会失去平衡难以控制。在高空中飞行时,风力大小和方向上的变化是无法预测的,常规的无人机通过改变俯仰角和横滚角来改变无人机自身升力的方向来对抗风阻,而在这期间容易产生位置上的偏移,如果带有航拍摄像头还会影响其拍摄的角度和稳定性。
现有的无人机在起降过程中全部靠桨叶提供升降力,一般的民用无人机都搭载摄像头进行远程操作,会导致机身重量不平衡,在起降过程中容易发生机身倾斜和重心偏移等问题。斜面起降过程中,如果仅靠桨叶提供升降力,这时的升力是倾斜的,垂直分力用于克服无人机的重力,而水平分力会进一步加快无人机的机身倾斜和重心偏移失衡方向发展,增加了无人机发生侧翻现象,限制了无人机在起降时的斜面角度,进一步限制了无人机的起降环境。
一般无人机在斜坡或崎岖路面降落存在较大的问题,针对这方面问题设计了一些特殊无人机,例如已授权的中国发明专利(CN110329495B)公开了一种无人机吸附装置及其吸附方法,该专利中的步骤一令无人机自主倾斜,旋翼无人机机身倾斜角度超过30°时,旋翼无法提供足够的升力,导致无人机坠机。此外,无人机旋翼提供的升力方向因无人机自主倾斜,这时的升力是倾斜的并靠向墙面,垂直分力用于克服无人机的重力,而水平分力方向朝向墙面,所以无人机的桨叶更靠近墙面,而吸附组件更远离墙面,很难实现停靠墙面的状态。如何解决现有的技术问题成了相关领域技术人员急需解决的。
发明内容
本发明的目的在于提供一种旋翼无人机的喷吸气脚架。喷吸气脚架可令无人机吸附在竖直平面或斜面上,辅助无人机在倾斜角度较大的斜面上平稳起飞,并能应对无人机紧急故障和飞行中遇强气流的情况,提高无人机的可靠性。
本发明的一种旋翼无人机的喷吸气脚架,包括无人机机体和喷吸气脚架。
所述的喷吸气脚架包括水平转轴、连接杆、竖直转轴、喷吸气装置以及橡胶垫圈。
所述的水平转轴和竖直转轴由电机控制,电机通过导线与控制器相连接,接收控制器发送的控制指令,实现控制各自旋转角度。
所述的连接杆为弯曲光滑结构,用于连接水平转轴和竖直转轴,保证各个喷吸气脚架的气口能朝向同一方向。
所述的喷吸气装置包括电机、风扇、气口、气孔和过滤网。喷吸气装置的电机上下位置均设有风扇,设置双风扇来提高喷吸气效率。电机上方的风扇与气孔之间安装过滤网,上层过滤网在喷吸气装置工作在喷气模式时,防止灰尘异物从喷吸气装置的气孔进入风扇中。电机下方的风扇与气口之间安装过滤网,下层过滤网在喷吸气装置工作在吸气模式时,防止灰尘异物从喷吸气装置的气口进入风扇中,避免风扇堵塞停转的发生。通过电机工作带动风扇正反转,实现喷吸气装置的喷气和吸气功能。所述的喷吸气装置两侧各设有三个等距排列的圆形气孔,喷吸气装置工作时,通过气孔和气口喷出或吸入气体。所述的喷吸气装置的电机使用导线与控制器连接,接收控制器发送的控制指令。
所述的橡胶垫圈安装于喷吸气脚架的底部,在无人机降落时起到缓冲的作用,橡胶垫圈内部装有压力传感器,传感器在喷吸气脚架接触到地面时返回一个信号。
旋翼无人机在竖直墙面上的吸附方法,包括以下步骤:
步骤一、飞行中的无人机切换至吸附模式,该模式下无人机的旋翼提供升力的大小为无人机自身的重力,控制器发送指令给无人机的各个喷吸气脚架。
步骤二、无人机的各个喷吸气脚架接收到控制器发出的控制指令后,距离竖直墙面近侧的两个喷吸气脚架旋转水平转轴和竖直转轴,令较近侧的喷吸气脚架的气口向内垂直于竖直墙面,距离竖直墙面远侧的两个喷吸气脚架旋转水平转轴和竖直转轴,令远侧的喷吸气脚架的气口向外垂直于竖直墙面。
步骤三、控制器发送指令控制距离竖直墙面远侧的两个喷吸气脚架工作在喷气模式,通过两个喷吸气脚架水平喷气的方式令无人机机身水平移动,当无人机距离竖直墙面近侧的两个喷吸气脚架与竖直墙面完全接触时,喷吸气脚架底部橡胶垫圈内的压力传感器反馈信号给控制器。控制器接收到压力传感器的信号后,控制该侧喷吸气脚架工作在吸气模式,令无人机一侧牢牢吸附在竖直墙面上,并控制处于吸气模式中的喷吸气脚架的水平转轴和竖直转轴,令喷吸气脚架的气口竖直向下。无人机旋翼停止旋转,由距离竖直墙面远侧的喷吸气脚架喷气提供无人机所需的升力。
步骤四、无人机缓慢向竖直墙面倾斜,在倾斜过程中,处于喷气模式中的喷吸气脚架始终与无人机机体垂直向下喷气。处于吸气模式中的喷吸气脚架的竖直转轴旋转角度随无人机的俯仰角和横滚角变化,保证喷吸气脚架始终垂直于竖直墙面。
步骤五、无人机不断倾斜,直至喷吸气脚架全部贴于竖直墙面上,此时橡胶垫圈内的压力传感器反馈信号给控制器,控制器控制喷吸气脚架工作在吸气模式,令无人机牢牢地吸附在墙面上,实现无人机吸附于竖直墙面上。
旋翼无人机的斜面辅助起飞方法,包括以下步骤:
步骤一、无人机放置在斜面上并解锁后,获得俯仰角和横滚角的初始数据。
步骤二、控制器获得俯仰角和横滚角的初始数据得到无人机平面与水平面的关系,控制器发送指令控制高侧的喷吸气脚架工作在吸气模式。无人机低侧的喷吸气脚架工作在喷气模式,令无人机平面靠近水平位置。
步骤三、当无人机平面达到水平位置时,处于吸气模式的喷吸气脚架转为喷气模式,在起飞过程中实时获取无人机俯仰角和横滚角并监控无人机的状态,控制器根据俯仰角和横滚角的变化程度,发送相应的指令来控制喷吸气装置中的电机转速,实时调整无人机各个喷吸气脚架喷气力度大小。无人机整体达到水平状态后,控制无人机旋翼开始旋转提供升力,当无人机离地面达到设定的高度后喷吸气脚架停止喷气,完成起飞。
旋翼无人机故障的紧急应对方法,包括以下步骤:
步骤一、控制器检测到某一喷吸气脚架上方的电机停止工作,不平衡的转矩令无人机开始逆时针旋转,且无法在该方向上提供升力。
步骤二、控制器根据故障旋翼的位置和旋转方向,发送控制指令控制各个喷吸气脚架工作于喷气模式,故障旋翼正下方的喷吸气脚架竖直转轴向内旋转一定角度,相邻的两个喷吸气脚架收到控制指令后,水平转轴和竖直转轴旋转一定的角度,令相邻的两个喷吸气脚架气口都朝向故障旋翼正下方的喷吸气脚架,令三个喷吸气脚架在水平分量上喷气的力相互抵消,为无人机在故障的一侧提供足够升力。故障旋翼斜对角的喷吸气脚架收到控制指令后,该喷吸气脚架的气口调整为故障旋翼旋转相反的方向,抵消该旋翼旋转时产生的扭矩,防止无人机原地打转无法控制。
步骤三、喷吸气脚架都工作在喷气模式,根据俯仰角、横滚角和偏航角的变化,来调整各个喷吸气脚架的喷气力度,令俯仰角、横滚角和偏航角保持不变,保持无人机的稳定,安全降落至地面。
旋翼无人机的抗风方法,包括以下步骤:
步骤一、无人机在空中飞行过程中遇到气流,控制器对俯仰角和横滚角的变化程度进行运算处理,获得气流对无人机作用的气流方向和气流大小。
步骤二、控制器根据气流方向并发送相应的控制指令给水平转轴和竖直转轴,竖直转轴顺时针旋转90°与水平转轴垂直,水平转轴旋转一定角度,令气口方向与气流方向相同,此时喷吸气脚架为抗风状态。
步骤三、控制器根据气流大小并发送控制指令给喷吸气装置中的电机,令喷吸气脚架都工作在喷气模式,通过控制电机转速,实现控制无人机各个喷吸气脚架喷气力度大小,完成抗风功能。
本发明具有的有益效果是:
(1)通过喷吸气脚架在喷气和吸气模式之间的切换,令无人机能够直接吸附在竖直或倾斜的墙面上,并通过喷吸气脚架水平的喷气,无需令无人机机身倾斜靠近墙面,无人机保持水平姿态接近吸附墙面,避免在无人机倾斜时无人机的桨叶更靠近墙面的情况,大大增强了无人机的环境适应能力。
(2)无人机起飞时,高侧的喷吸气脚架工作于吸气模式,低侧的喷吸气脚架工作于喷气模式。在无人机处于水平状态后,控制无人机旋翼旋转提供升力,无人机的喷吸气脚架都工作于喷气模式,并结合无人机的俯仰角和横滚角,控制无人机各个喷吸气脚架喷气力度大小,保证无人机在起飞过程中不被气流变化和重心偏移影响,辅助无人机升起更加快速平稳。
(3)当无人机其中的旋翼、电机或电调出现故障,出现故障的旋翼无法提供升力,导致无人机升力不平衡发生炸机情况时,令故障旋翼正下方的喷吸气脚架向内旋转一定角度,相邻的两个喷吸气脚架气口都朝向故障旋翼正下方的喷吸气脚架,辅助无人机在故障的一侧提供升力。故障旋翼斜对角的喷吸气脚架,将气口调整为故障旋翼旋转相反的方向,抵消该旋翼旋转时产生的扭矩,防止无人机原地打转无法控制,避免无人机从高处坠落的损失,提高了无人机的可靠性。
(4)提升了无人机在飞行过程中的抗风能力,无人机的俯仰角和横滚角达到30°时,无人机此时抗风能力达到极限,倘若风速继续增大,则无人机无法提供足够的升力维持自身平衡,发生坠机的现象。通过针对风向的喷吸气脚架喷气,能进一步的提高无人机的抗风能力,减小气流对无人机飞行速度的影响,解决了无人机在飞行过程中遭遇强气流时倾斜角度过大的问题,避免侧翻现象的发生,保障无人机在空中安全飞行,提高了无人机的可靠性。
附图说明
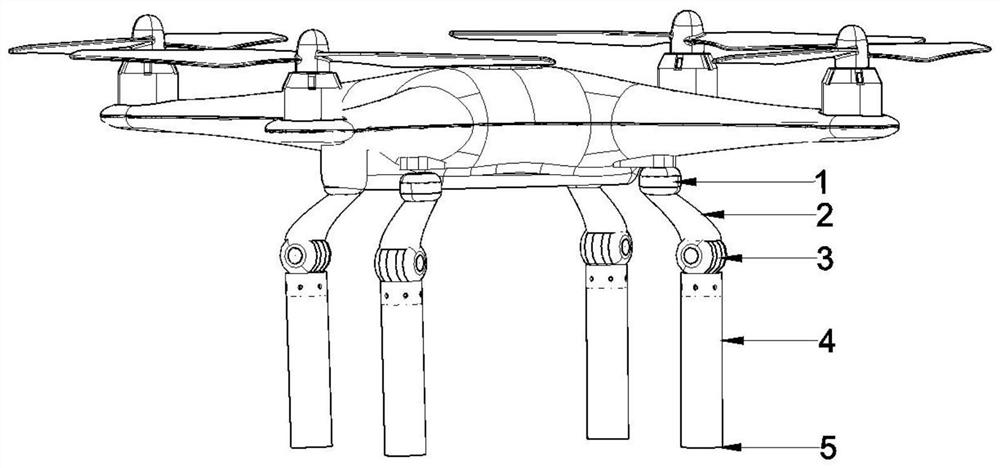
图1是旋翼无人机的整体图;
图2是旋翼无人机的喷吸气脚架图;
图3是旋翼无人机的喷吸气装置图;
图4是旋翼无人机的吸附方法中步骤一的示意图;
图5是旋翼无人机的吸附方法中步骤二的示意图;
图6是旋翼无人机的吸附方法中步骤三的示意图;
图7是旋翼无人机的吸附方法中步骤四的示意图;
图8是旋翼无人机的吸附方法中步骤五的示意图;
图9是旋翼无人机的辅助起飞图;
图10是旋翼无人机故障的紧急应对状态图;
图11是旋翼无人机的抗风状态图。
具体实施方式
以下结合附图对本发明的具体实施方式作进一步说明。
如图1所示,本发明的一种旋翼无人机的喷吸气脚架,包括无人机机体和喷吸气脚架。
如图2所示,喷吸气脚架包括水平转轴1、连接杆2、竖直转轴3、喷吸气装置4以及橡胶垫圈5。水平转轴1和竖直转轴3由电机控制,电机通过导线与控制器相连接,接收控制器发送的控制指令,实现控制各自旋转角度。连接杆2为弯曲光滑结构,用于连接水平转轴1和竖直转轴3,保证各个喷吸气脚架的喷气时能朝向同一方向。喷吸气装置4顶部与竖直转轴3连接,橡胶垫圈5安装于喷吸气脚架的底部,在无人机降落时起到缓冲的作用。
如图3所示,喷吸气装置4包括电机4-1、风扇4-2、气孔4-3、气口4-4和过滤网4-5。喷吸气装置4的电机4-1上下位置均设有风扇4-2,设置双风扇来提高喷吸气效率。电机4-1上方的风扇4-2与气孔4-3之间安装过滤网4-5,上层过滤网4-5在喷吸气装置4工作在喷气时,防止灰尘异物从喷吸气装置4的气孔4-3进入风扇中。电机4-1下方的风扇4-2与气口4-4之间安装过滤网4-5,下层过滤网4-5在喷吸气装置4工作在吸气模式时,防止灰尘异物从喷吸气装置4的气口4-4进入风扇4-2中,避免风扇4-2堵塞停转的发生。通过电机4-1工作带动风扇4-2正反转,实现喷吸气装置4的喷气和吸气功能。喷吸气装置4两侧各设有三个等距排列的圆形气孔4-3,喷吸气装置4工作时,所需喷出的气体由上方的气孔4-3吸入,再通过气口4-4喷出。通过气孔4-3和气口4-4喷出或吸入气体。喷吸气装置4的电机4-1使用导线与控制器连接,接收控制器发送的控制指令。
旋翼无人机在竖直墙面上的吸附方法,包括以下步骤:
步骤一、如图4所示,飞行中的无人机切换至吸附模式,该模式下无人机的旋翼提供升力的大小为无人机自身的重力,控制器发送指令给无人机的喷吸气脚架M1、M2、M3和M4。
步骤二、如图5所示,无人机的各个喷吸气脚架接收到控制器发出的控制指令后,喷吸气脚架M3的水平转轴逆时针旋转45°,M3的竖直转轴逆时针旋转90°,喷吸气脚架M4的水平转轴顺时针旋转45°,M4的竖直转轴逆时针旋转90°,令喷吸气脚架M3和M4的气口4-4向内垂直于竖直墙面,喷吸气脚架M1的水平转轴顺时针旋转45°,M1的竖直转轴顺时针旋转90°,喷吸气脚架M2的水平转轴逆时针旋转45°,M2的竖直转轴顺时针旋转90°,令喷吸气脚架的气口4-4向外垂直于竖直墙面。
步骤三、如图6所示,控制器发送指令给喷吸气脚架M1和M2中喷吸气装置4的电机4-1,接收到控制指令后电机4-1正转,喷吸气脚架M1和M2工作模式为喷气模式,通过喷吸气脚架M1和M2水平喷气的方式令无人机机身水平移动,当无人机喷吸气脚架M3和M4与竖直墙面完全接触时,喷吸气脚架底部橡胶垫圈5内的压力传感器反馈信号给控制器。控制器接收到压力传感器的信号后,发送控制指令给喷吸气装置4中的电机4-1,接收到控制指令后电机4-1反转,喷吸气脚架M3和M4工作模式为吸气模式,令无人机一侧牢牢吸附在竖直墙面上,并控制处于吸气模式中的喷吸气脚架M1和M2的竖直转轴3逆时针旋转90°,令喷吸气脚架M1和M2的气口4-4竖直向下。无人机旋翼提供的升力方向垂直于无人机机体,该升力会阻碍无人机倾斜贴近竖直墙面,因此无人机旋翼停止旋转,由喷吸气脚架M1和M2喷气提供无人机所需的升力。
步骤四、如图7所示,无人机缓慢向竖直墙面倾斜,在倾斜过程中,处于喷气模式中的喷吸气脚架M1和M2始终与无人机机体垂直向下喷气。处于吸气模式中的喷吸气脚架M3和M4的竖直转轴3旋转角度随无人机的俯仰角和横滚角变化,保证喷吸气脚架M3和M4始终垂直于竖直墙面。
步骤五、如图8所示,无人机不断倾斜,直至喷吸气脚架M1、M2、M3和M4全部贴于竖直墙面上,此时喷吸气脚架M1和M2中橡胶垫圈5内的压力传感器反馈信号给控制器,控制器接收到压力传感器的信号后,发送控制指令给喷吸气装置4中的电机4-1,接收到控制指令后电机4-1反转,喷吸气脚架M1和M2工作模式由喷气模式切换为吸气模式,令无人机牢牢地吸附在墙面上,实现无人机吸附于竖直墙面上。
如图9所示,旋翼无人机的斜面辅助起飞方法,包括以下步骤:
步骤一、无人机放置在斜面上并解锁后,控制器获得俯仰角和横滚角的初始数据。
步骤二、控制器获得俯仰角和横滚角的初始数据得到无人机平面与水平面的关系,控制器发送指令控制较高一侧的喷吸气脚架M3和M4工作在吸气模式。无人机低侧的喷吸气脚架M1和M2工作在喷气模式,令无人机平面靠近水平位置。
步骤三、当无人机平面达到水平位置时,控制器发送控制指令给喷吸气装置4中的电机4-1,接收到控制指令后电机4-1正转,喷吸气脚架M3和M4工作模式由吸气模式切换为喷气模式,在起飞过程中实时获取无人机俯仰角和横滚角并监控无人机的状态,控制器根据俯仰角和横滚角的变化程度,发送相应的指令来控制喷吸气装置4中的电机4-1转速,实时调整无人机喷吸气脚架M1、M2、M3和M4喷气力度大小,无人机整体达到水平状态后,控制无人机旋翼开始旋转提供升力,当无人机离地面达到设定的高度后喷吸气脚架停止喷气,完成起飞。
如图10所示,旋翼无人机故障的紧急应对方法,包括以下步骤:
步骤一、控制器检测到喷吸气脚架M1上方逆时针旋转的电机停止工作,因缺失逆时针旋转的旋翼,不平衡的转矩令无人机开始逆时针旋转,且无法在该方向上提供升力。
步骤二、控制器根据故障旋翼的位置和旋转方向,发送控制指令控制各个喷吸气脚架工作于喷气模式,喷吸气脚架M1的竖直转轴3逆时针旋转25°,喷气脚M2的水平转轴1逆时针旋转120°,竖直转轴3顺时针旋转25°,喷气脚M3的水平转轴1顺时针旋转120°,竖直转轴3顺时针旋转25°,令喷吸气脚架M1、M2和M3喷气方向朝向同一点,令喷吸气脚架M1、M2和M3在水平分量上喷气的力相互抵消,为无人机在故障的一侧提供足够升力。故障旋翼斜对角的喷吸气脚架M4收到控制指令后,喷气脚M4的水平转轴1顺时针旋转50°,竖直转轴3顺时针旋转90°,令喷吸气脚架M4的气口4-4调整为顺时针喷气,抵消旋翼逆时针旋转时产生的扭矩,防止无人机原地打转无法控制。
步骤三、根据俯仰角、横滚角和偏航角的变化,来调整各个喷吸气脚架的喷气力度,令俯仰角、横滚角和偏航角保持不变,保持无人机的稳定,安全降落至地面。
如图11所示,旋翼无人机的抗风方法,包括以下步骤:
步骤一、无人机在空中飞行过程中遇到气流,控制器对俯仰角和横滚角的变化程度进行运算处理,获得气流对无人机作用的气流方向和气流大小。
步骤二、控制器根据气流方向并发送相应的控制指令给水平转轴1和竖直转轴3,竖直转轴3顺时针旋转90°与水平转轴1垂直,水平转轴1顺时针旋转15°,令气口4-4方向与气流方向相同,此时喷吸气脚架为抗风状态。
步骤三、控制器根据气流大小并发送控制指令给喷吸气装置4中的电机4-1,令喷吸气脚架都工作在喷气模式,通过控制电机4-1转速,实现控制无人机各个喷吸气脚架喷气力度大小,完成抗风功能。
- 一种旋翼无人机的喷吸气脚架
- 一种旋翼无人机的自平衡脚架、旋翼无人机及方法