一种战术机器人智能靶标系统及其控制方法
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及智能靶标技术领域,尤其涉及一种战术机器人智能靶标系统及其控制方法。
背景技术
信息化条件下作战,环境复杂、情况多变、对抗激烈,对作战人员的战斗技能、应变能力和心理抗压能力提出了更高的要求,科学技术的进步和军事斗争准备的需要,推动了无人靶标的发展。
战术机器人靶标系统在军事射击训练过程中起着很大的作用,主要用于模拟匪徒的动作行为,一般基于移动式平台,主要有以下三种方案:
(1)在场地内铺设轻轨或型材作为导轨,靶标可在轨道内往返运行,速度可控,缺点是铺设轨道需要对原先的场地进行改造,工作量大,靶标的运动路线固定,具备可预测性;
(2)在场地内铺设磁条,靶标通过测量路径上的磁场信号来获取自身相对于目标跟踪路径之间的位置偏差,从而实现靶标的控制及导航,缺点是磁条容易破损,需要定期维护,路径变更需要重新铺设磁带;
(3)开环控制,设定靶标在初始位置坐标,依靠靶标自身的电机编码器实时计算当前位置,优点是不需要对场地做改动,使用简便,缺点是对电机编码器精度要求比较高,不能形成大闭环控制,往往多次行走后位置会有很大的偏差。
发明内容
针对以上现有技术中存在的问题,本发明旨在提供一种战术机器人智能靶标系统及其控制方法,该机器人靶标具备实时定位、自主避障及导航功能,转弯灵活,可搭载不同的报靶设备,如起倒靶、胸环靶、人形靶等等,用于模拟不同的训练场景。
为实现上述的目的,本发明采用以下的技术方案来实现:
一种战术机器人智能靶标系统,包括智能靶标移动平台、报靶设备、基站节点、主控中心。
所述的智能靶标移动平台,包括上盖板和下车体;上盖板通过铰链与下车体连接,上盖板上可根据实际训练需求搭载不同的报靶设备;下车体的前后端面均设有两个超声避障模块,该超声模块均采用自发自收模式且超声感应阈值可调,通过有线串行通讯接口与主控制器连接;下车体的左右两个侧面均设有两个行走模组;行走模组主要包括橡胶轮组件、直流无刷电机和行星减速箱,其中直流无刷电机内部集成高分辨率光电编码器;下车体左右两个侧面中间各设有把手,方便运输携带,后端面正中心上下分布有上电开关和急停开关,开关的两侧各设有一排航插和天线。下车体内部四个对角分别设有转向舵机,每个行走模组可以独立转向,转向舵机通过CAN总线级联与主控制器通讯;下车体底部安装有电池箱,电池箱的下面设有姿态传感模块,通过串行485接口将数据发送至主控制器,姿态传感模块用于实时感知智能移动靶标平台的位姿;电池箱正上面设有主控制器,主控制器的左右两侧分别设有两个行走驱动器,行走驱动器通过CAN总线级联与主控制器通讯;主控制器前侧靠近航插的区域设有固态接触器、电源分流器和标签节点;其中固态接触器用于靶标平台充电控制,电源分流器用于将电池的电源分流至车内各模块,标签节点用于靶标平台的实时定位,通过USB接口与主控制器通讯;主控制器后侧靠近下车体前端面区域设有无线网桥,通过无线网络与主控中心通讯。
优选的,所述的报靶设备搭载在智能靶标移动平台上,可以根据训练需要选择相应的报靶设备,支持起倒靶、摇摆靶、侧转靶和固定靶。
优选的,所述的基站节点和标签节点由MCU微控芯片、UWB无线收发芯片、FLASH扩展存储器、USB接口电路、PCB天线、时钟芯片和电源模块构成,MCU微控芯片的输出端与UWB无线收发芯片、FLASH扩展存储器和USB接口电路相连,UWB无线收发芯片的输出端与PCB天线连接,时钟芯片与MCU微控芯片连接,电源模块与MCU微控芯片、UWB无线收发芯片和时钟芯片相连。
一种战术机器人智能靶标系统控制方法,包括以下步骤:
(1)基站节点在训练区域内呈三角形位置分布,基站之间网络互相覆盖;
(2)智能移动靶标平台进行初始位置定位,利用平台上的标签节点获取自身与各基站节点之间超宽带信号传播时间,根据时间差可以得到标签节点距离各基站节点的距离信息,采用RSSI三点测距方法,解算出标签节点的实际位置坐标。
(3)主控中心根据训练需求向智能移动靶标平台发送相应的战术动作,如往返运行、直线冲撞、曲线冲撞、自动归位等等。平台将对应的战术动作所走的路径离散化为一系列路径跟踪点,每个路径跟踪点包含坐标信息和速度信息;
(4)智能移动靶标平台通过标签节点实时获取当前位置信息,采用点跟踪算法,对战术路径上的下一个目标跟踪点计算位移偏差,并根据位移偏差和当前的速度信息融合计算得到当前点的速度期望值大小和方向;
(5)再进一步根据四轮八驱结构模型,将当前的期望速度分解得到四个行走电机的速度和四个转向电机的偏角,从而形成一个闭环控制系统;
(6)当运行过程中超声感应到障碍物,自动减速停车,若障碍物撤离,可继续执行目标点跟踪;
(7)重复(4)、(5)和(6)步骤,直至完成所有的路径跟踪点的执行。
本发明的有益效果:
1、由于采用了上述方案,该战术机器人智能靶标系统可以实现即时定位,自主导航和避障,结构简单,操作方便,便于维护;
2、采用UWB超带宽无线通信技术,具有很高的通信速率和通信可靠性,可以达到厘米级定位精度;
3、靶标平台采用四轮八区的结构,减少传统四轮差速带来的轮胎磨损,转向灵活,狭小空间内的通过性好;
4、该智能靶标系统可以实现路径规划、自主导航和避障,操作简单,易于维护。
附图说明
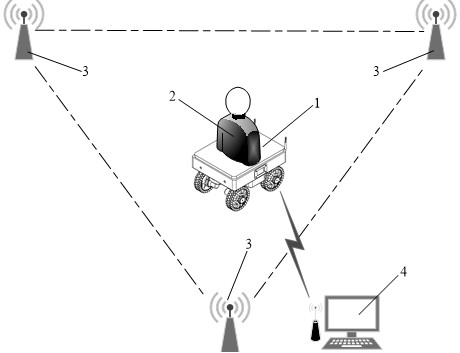
图1为本发明实施例1的系统布局图;
图2为本发明实施例1的智能靶标移动平台侧视图;
图3为本发明实施例1的智能靶标移动平台后视图;
图4为本发明实施例1的智能靶标移动平台内部图;
图5为本发明实施例1的基站节点和标签节点结构原理图;
图6为本发明实施例1的系统控制流程图。
图中:1-智能靶标移动平台;2-报靶设备;3-基站节点;4-主控中心;5-上盖板;6-下车体;7-铰链;8-超声避障模块;9-行走模组;10-橡胶轮组件;11-直流无刷电机;12-行星减速箱;13-把手;14-上电开关;15-急停开关;16-航插;17-天线;18-转向舵机;19-电池箱;20-姿态传感模块;21-主控制器;22-行走驱动器;23-固态接触器;24-电源分流器;25-标签节点;26-无线网桥。
具体实施方式
为使对本发明的目的、构造、特征、及其功能有进一步的了解,兹配合实施例详细说明如下。
请参见图1,一种战术机器人智能靶标系统,包括智能靶标移动平台1、报靶设备2、基站节点3、主控中心4。
请参见图2、图3和图4,所述的智能移动靶标平台1,包括上盖板5和下车体6;上盖板5通过铰链7与下车体6连接,上盖板5可根据实际训练需求搭载不同的报靶设备;下车体6的前后端面均设有两个超声避障模块8,该超声模块8均采用自发自收模式且超声感应阈值可调,通过有线串行通讯接口与主控制器21连接;下车体6的左右两个侧面均设有两个行走模组9;行走模组9主要包括橡胶轮组件10、直流无刷电机11和行星减速箱12,其中直流无刷电机11内部集成高分辨率光电编码器;下车体左右两个侧面中间各设有把手13,方便运输携带,后端面正中心上下分布有上电开关14和急停开关15,开关的两侧各设有一排航插16和天线17。下车体6内部四个对角分别设有转向舵机18,每个行走模组9可以独立转向,转向舵机18通过CAN总线级联与主控制器21通讯;下车体6底部安装有电池箱19,电池箱的下面设有姿态传感模块20,通过485接口将数据发送至主控制器21,姿态传感模块20用于实时感知智能移动靶标平台1的位姿;电池箱19正上面设有主控制器21,主控制器的左右两侧分别设有两个行走驱动器22,行走驱动器22通过CAN总线级联与主控制器21通讯;主控制器21前侧靠近航插16的区域设有固态接触器23、电源分流器24和标签节点25;其中固态接触器用于靶标平台1充电控制,电源分流器24用于将电池的电源分流至车内各模块,标签节点25用于靶标平台的实时定位,通过USB接口与主控制器21通讯;主控制器20后侧靠近下车体6前端面区域设有无线网桥26,通过无线网络与主控中心4通讯。
请进一步参见图1,所述的报靶设备2搭载在智能靶标移动平台1上,可以根据训练需要选择相应的报靶设备,支持起倒靶、摇摆靶、侧转靶和固定靶。
请参见图5,所述的基站节点2和标签节点25由MCU微控芯片、UWB无线收发芯片、FLASH扩展存储器、USB接口电路、PCB天线、时钟芯片和电源模块构成,MCU微控芯片的输出端与UWB无线收发芯片、FLASH扩展存储器和USB接口电路相连,UWB无线收发芯片的输出端与PCB天线连接,时钟芯片与MCU微控芯片连接,电源模块与MCU微控芯片、UWB无线收发芯片和时钟芯片相连。
请参见图6,一种战术机器人智能靶标系统控制方法,包括以下步骤:
(1)基站节点3在训练区域内呈三角形位置分布,基站之间网络互相覆盖;
(2)智能移动靶标平台1进行初始位置定位,利用平台上的标签节点获取自身与各基站节点之间超宽带信号传播时间,根据时间差可以得到标签节点距离各基站节点的距离信息,采用RSSI三点测距方法,解算出标签节点的实际位置坐标。
(3)主控中心4根据训练需求向智能移动靶标平台1发送相应的战术动作,如往返运行、直线冲撞、曲线冲撞、自动归位等等。平台将对应的战术动作所走的路径离散化为一系列路径跟踪点,每个路径跟踪点包含坐标信息和速度信息;
(4)智能移动靶标平台1通过标签节点实时获取当前位置信息,采用点跟踪算法,对战术路径上的下一个目标跟踪点计算位移偏差,并根据位移偏差和当前的速度信息融合计算得到当前点的速度期望值大小和方向;
(5)再进一步根据四轮八驱结构模型,将当前的期望速度分解得到四个行走电机的速度和四个转向电机的偏角,从而形成一个闭环控制系统;
(6)当运行过程中超声感应到障碍物,自动减速停车,若障碍物撤离,可继续执行目标点跟踪;
(7)重复(4)、(5)和(6)步骤,直至完成所有的路径跟踪点的执行。
本发明已由上述相关实施例加以描述,然而上述实施例仅为实施本发明的范例。必需指出的是,已揭露的实施例并未限制本发明的范围。相反地,在不脱离本发明的精神和范围内所作的更动与润饰,均属本发明的专利保护范围。
- 一种战术机器人智能靶标系统及其控制方法
- 一种CQB战术训练靶标系统及科目控制方法