一种五金喷漆烘干机器人
文献发布时间:2023-06-19 12:00:51
技术领域
本发明属于五金生产中的喷漆加工领域,更具体地说,尤其是涉及到一种五金喷漆烘干机器人。
背景技术
五金组件在制成产品领域上广为常见,其通常被进行喷漆,美化其外在并能在一定程度上防止其短时间出现腐绣,喷漆之后还需及时利用喷漆烘干机器人对五金件进行漆面烘干,加快五金组件的加工效率。
基于上述本发明人发现,现有的五金喷漆烘干机器人存在以下不足:
烘干机器人的烘干系统通常是利用陶瓷加热管发热,将热管腔中热气流与外界气体进行循环流通,将烘干头吹出的热气作用在漆面上进行烘干作业,由于烘干头吹气是成股吹出,且烘干头位移速度缓慢,容易出现直对烘干头部位的漆面热气温度过高,直接出现漆面干化过快而开裂的现象,而周围受热小,导致漆面受烘干程度相差大。
因此需要提出一种五金喷漆烘干机器人。
发明内容
针对现有技术存在的不足,本发明目的是提供一种五金喷漆烘干机器人,以解决现有技术的问题。
为了实现上述目的,本发明是通过如下的技术方案来实现:一种五金喷漆烘干机器人,其结构设有底座、控制箱、支臂、烘干系统,所述控制箱安装于底座一侧端,所述支臂活动连接在底座上方,所述烘干系统一端与支臂铰接连接且活动配合。
所述烘干系统设有后箱、风架、陶瓷管、烘干头、热管腔,所述风架嵌入安装在后箱内部,所述陶瓷管位于后箱中,所述热管腔与后箱相贯通,所述烘干头与热管腔活动配合。
作为本发明的进一步改进,所述烘干头设有滑动板、侧板、活动柱,所述滑动板环套连接在侧板外侧,所述活动柱活动于侧板内侧偏前方位置,所述滑动板可进行滑动,所述活动柱可进行翻摆活动,所述滑动板位移带动活动柱活动,便于进行移动式烘干。
作为本发明的进一步改进,所述活动柱设有气流腔、出气口、晃摆体,所述出气口与气流腔最底部位置且相贯通,所述晃摆体嵌入于出气口上端且活动于其下方,所述气流腔为贯通的空心状态,所述晃摆体可进行幅度晃摆。
作为本发明的进一步改进,所述晃摆体设有中柱、连接杆、弧状块、受压块,所述受压块滑动连接在中柱侧端,所述连接杆上端与受压块相连接,所述连接杆下端与弧状块相连接且活动配合,所述受压块为上端径呈大于下端径长的三角块状物,所述连接杆具有一定的长度限制,并具有伸缩性质,所述弧状块呈弧状形态。
作为本发明的进一步改进,所述弧状块设有韧块、变动腔、活动球、瓣口,所述变动腔与韧块为一体化结构且位于其内部,所述活动球活动于变动腔内部,所述瓣口设在韧块前侧端位置,所述韧块为硅胶材质,具有一定的柔韧性,所述活动球为圆球结构且可进行大小变化。
作为本发明的进一步改进,所述活动球设有重块、可变环、伸缩架,所述重块位于可变环内侧,所述伸缩架连接在重块与可变环之间且活动配合,所述可变环呈圆环结构且具有韧性,可进行扩缩变化,所述重块具有重压力,所述伸缩架可进行伸缩活动。
作为本发明的进一步改进,所述瓣口设有扯胶边、气垫、气流口、前板,所述气垫连接在扯胶边之间,所述气流口与气垫为一体化结构且位于其下方位置,所述前板与瓣口为一体化且贯通设置,所述扯胶边具有一定的牵扯性,所述气流口呈通透口结构,开口径宽由内至外逐渐缩减,所述前板为设有通透口的板块。
作为本发明的进一步改进,所述前板设有鼓吹口、提杆、卡口,所述卡口铰接连接在鼓吹口内侧两端,所述提杆下端与卡口相连接且活动配合,所述卡口做单向摆开活动,所述提杆具有一定的伸缩性质。
与现有技术相比,本发明具有如下有益效果:
1.气流通过时对受压块产生气流压力,使连接杆受压位移下降,由连接杆的伸缩弹性力,辅助弧状块随上方气流施加的压力而有转晃活动,韧块的弧状形态下做弧状翻转,对其上方的气流有一定的引流效果,利于热气更快的排散出出气口外周,由活动球随韧块角度变化而有驱动力做滚动活动,对韧块不断施加压力,进一步辅助弧状块转晃角度增加,利于气流有更大的排散面积,增大扩散面而更好的令漆面受热匀称。
2.由伸缩架的伸缩性辅助重块与可变环的间距变化,可变环自身可压缩的韧性性质,便于活动球整体在滚动过程中有灵活的扩缩形变,滚压过气垫,使其内部气体通由气流口向外挤出,对卡口产生外向气流推力,令卡口在提杆的牵拉配合下,呈摆开状态,使得气流从前板向其外侧产生鼓吹力,进一步将气流吹乱而扩散,复位时,由提杆配合卡口令其呈水平状态,而在鼓吹口前端形成闭合,防止外界油漆干化物反向进入瓣口内部。
附图说明
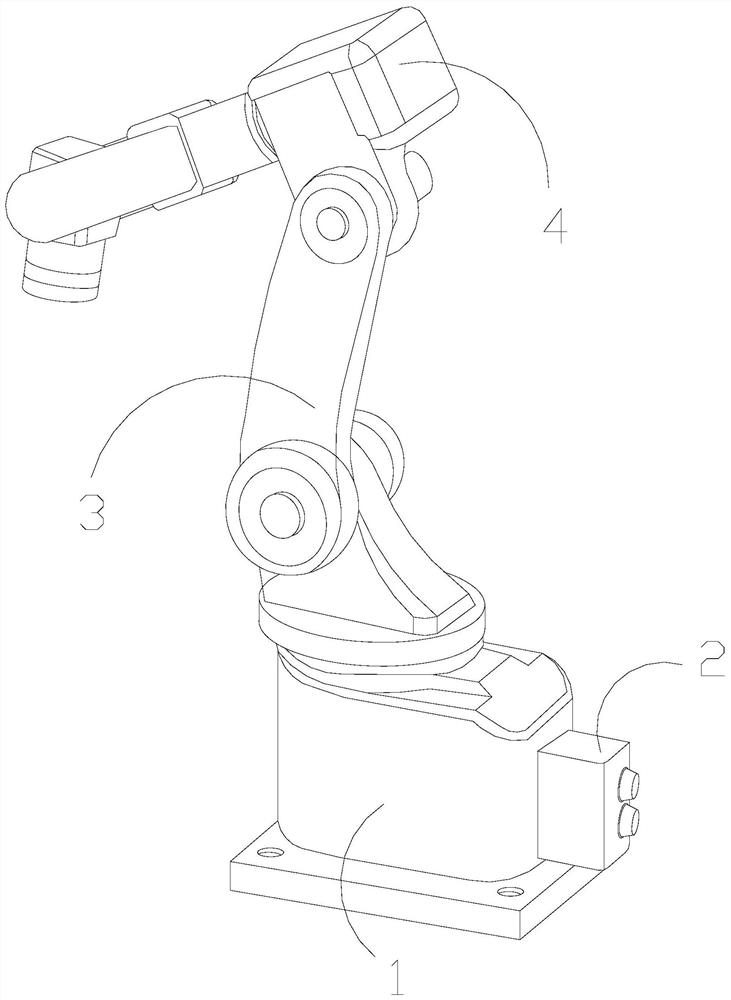
图1为本发明一种五金喷漆烘干机器人的结构示意图。
图2为本发明一种烘干系统的内部侧视结构示意图。
图3为本发明一种烘干头的内部俯视结构示意图。
图4为本发明一种活动柱的内部侧视结构示意图。
图5为本发明一种晃摆体的内部侧视结构示意图。
图6为本发明一种弧状块的内部侧视结构示意图。
图7为本发明一种活动球的内部侧视结构示意图。
图8为本发明一种瓣口的内部侧视结构示意图。
图9为本发明一种前板的内部侧视结构示意图。
图中:底座-1、控制箱-2、支臂-3、烘干系统-4、后箱-41、风架-42、陶瓷管-43、烘干头-44、热管腔-45、滑动板-441、侧板-442、活动柱-443、气流腔-a1、出气口-a2、晃摆体-a3、中柱-a31、连接杆-a32、弧状块-a33、受压块-a34、韧块-q1、变动腔-q2、活动球-q3、瓣口-q4、重块-q31、可变环-q32、伸缩架-q33、扯胶边-q41、气垫-q42、气流口-q43、前板-q44、鼓吹口-w1、提杆-w2、卡口-w3。
具体实施方式
以下结合附图对本发明做进一步描述:
实施例1:
如附图1至附图6所示:
本发明提供一种五金喷漆烘干机器人,其结构设有底座1、控制箱2、支臂3、烘干系统4,所述控制箱2安装于底座1一侧端,所述支臂3活动连接在底座1上方,所述烘干系统4一端与支臂3铰接连接且活动配合。
所述烘干系统4设有后箱41、风架42、陶瓷管43、烘干头44、热管腔45,所述风架42嵌入安装在后箱41内部,所述陶瓷管43位于后箱41中,所述热管腔45与后箱41相贯通,所述烘干头44与热管腔45活动配合。
其中,所述烘干头44设有滑动板441、侧板442、活动柱443,所述滑动板441环套连接在侧板442外侧,所述活动柱443活动于侧板442内侧偏前方位置,所述滑动板441可进行滑动,所述活动柱443可进行翻摆活动,所述滑动板441位移带动活动柱443活动,便于进行移动式烘干。
其中,所述活动柱443设有气流腔a1、出气口a2、晃摆体a3,所述出气口a2与气流腔a1最底部位置且相贯通,所述晃摆体a3嵌入于出气口a2上端且活动于其下方,所述气流腔a1为贯通的空心状态,所述晃摆体a3可进行幅度晃摆,所述晃摆体a3在受气流力作用时,随受力大小而有不同的转摆跃度。
其中,所述晃摆体a3设有中柱a31、连接杆a32、弧状块a33、受压块a34,所述受压块a34滑动连接在中柱a31侧端,所述连接杆a32上端与受压块a34相连接,所述连接杆a32下端与弧状块a33相连接且活动配合,所述受压块a34为上端径呈大于下端径长的三角块状物,所述连接杆a32具有一定的长度限制,并具有伸缩性质,所述弧状块a33呈弧状形态,所述弧状块a33在连接杆a32的带动配合下,可以进行起伏摆动,对从上方排流出的气流有一定的引导作用,且便于其外侧下端的气流受驱动而加速排散、扩大流动面积。
其中,所述弧状块a33设有韧块q1、变动腔q2、活动球q3、瓣口q4,所述变动腔q2与韧块q1为一体化结构且位于其内部,所述活动球q3活动于变动腔q2内部,所述瓣口q4设在韧块q1前侧端位置,所述韧块q1为硅胶材质,具有一定的柔韧性,所述活动球q3为圆球结构且可进行大小变化,所述活动球q3随韧块q1活动而有滚动力,韧块q1的韧性性质辅助变动腔q2可进行空间变化,对瓣口q4产生挤压,便于其更好的发挥其作用。
本实施例的具体使用方式与作用:人员通过操控控制箱2,使支臂3发生铰接摆折活动,同时烘干头44在热管腔45外滑动,便于活动柱443对不同方位的五金组件漆面进行烘干,且陶瓷管43随之受控发热,在风架42的活动下,进行气体循环,让热气流通过出气口a2的通口结构,进行气体交换,热气流作用于漆面而达到烘干效果,气流通过在气流腔a1中向出气口a2外流动时,对受压块a34产生气流压力,使连接杆a32受压位移下降,由连接杆a32的伸缩弹性力,辅助弧状块a33随上方气流施加的压力而有转晃活动,在韧块q1的弧状形态下做弧状翻转,对其上方的气流有一定的引流效果,利于热气更快的排散出出气口a2外周,由活动球q3随韧块q1角度变化而有驱动力做滚动活动,其自身的偏重性质便于其做往复滚动,同时对韧块q1不断施加压力,进一步辅助弧状块a33转晃角度增加,利于气流有更大的排散面积,增大扩散面而更好的令漆面受热匀称。
实施例2:
如附图7至附图9所示:
其中,所述活动球q3设有重块q31、可变环q32、伸缩架q33,所述重块q31位于可变环q32内侧,所述伸缩架q33连接在重块q31与可变环q32之间且活动配合,所述可变环q32呈圆环结构且具有韧性,可进行扩缩变化,所述重块q31具有重压力,所述伸缩架q33可进行伸缩活动,所述重块q31在可变环q32中,通过伸缩架q33的伸缩弹性,对可变环q32施压,使其灵活改变自身环径,使活动球q3整体不断扩缩形变。
其中,所述瓣口q4设有扯胶边q41、气垫q42、气流口q43、前板q44,所述气垫q42连接在扯胶边q41之间,所述气流口q43与气垫q42为一体化结构且位于其下方位置,所述前板q44与瓣口q4为一体化且贯通设置,所述扯胶边q41具有一定的牵扯性,所述气流口q43呈通透口结构,开口径宽由内至外逐渐缩减,所述前板q44为设有通透口的板块,所述气垫q42的高弹力便于其受挤压后形变,使气压变化,通由气流口q43、前板q44产生向外的鼓吹力,进一步絮乱外侧气流,使气流更好的扩散流动。
其中,所述前板q44设有鼓吹口w1、提杆w2、卡口w3,所述卡口w3铰接连接在鼓吹口w1内侧两端,所述提杆w2下端与卡口w3相连接且活动配合,所述卡口w3做单向摆开活动,所述提杆w2具有一定的伸缩性质,所述卡口w3受气流压力而向外侧摆开,在提杆w2的提拉作用下复位至呈水平状态,能有效阻挡外物进入。
本实施例的具体使用方式与作用:通过重块q31的重压性质,其受驱动会不断对可变环q32产生撞击,由伸缩架q33的伸缩性辅助其与可变环q32的间距变化,可变环q32自身可压缩的韧性性质,便于活动球q3整体在滚动过程中随外界挤压而有灵活的扩缩形变,更好的滚压过气垫q42,对其造成的挤压使气垫q42内部气压变化,气体通由气流口q43向外挤出,经由鼓吹口w1时,对卡口w3产生外向气流推力,令卡口w3在提杆w2的牵拉配合下,呈摆开状态,使得气流从前板q44向其外侧产生鼓吹力,进一步将气流吹乱而扩散,在气垫q42弹性复位时,由提杆w2配合卡口w3令其呈水平状态,而在鼓吹口w1前端形成闭合,防止外界油漆干化物反向进入瓣口q4内部。
利用本发明所述技术方案,或本领域的技术人员在本发明技术方案的启发下,设计出类似的技术方案,而达到上述技术效果的,均是落入本发明的保护范围。
- 一种五金喷漆烘干机器人
- 一种五金喷漆烘干机器人