一种机械手装置
文献发布时间:2023-06-19 12:14:58
技术领域
本发明属于机械运输设备技术领域,具体涉及一种机械手装置。
背景技术
在机械加工或者搬运时,都不可避免地需要将一些零件或者物料进行搬运,由于这一步骤较为频繁且工作内容单一,故而比起人工搬运,使用机械手更能够在提高效率的同时保证精度,但是现有的机械手装置,在进行不规则物料的夹持时,由于其下爪的角度单一,有时无法很好地进行夹持。
发明内容
为解决上述问题,本发明的目的在于提出一种机械手装置。
为达到上述目的,提出以下技术方案:
一种机械手装置,包括旋转调节结构、安装盒和夹持结构,旋转调节结构设于安装盒上端,夹持结构设于安装盒内,通过旋转调节结构来控制安装盒的角度和位置,通过夹持结构夹持零件或物料。
进一步地,所述的旋转调节结构包括驱动电机、安装箱、安装板和角度调节机构,所述的驱动电机设于安装箱内,驱动电机的旋转杆与安装板的上表面固定连接,安装板的下表面与角度调节机构的上端连接,角度调节机构的下端与安装盒固定连接。
进一步地,所述的角度调节机构包括电动滑块、滑轨、伸缩杆、固定杆、第一杆件、安装杆和固定板,所述的滑轨开设于安装板的下表面,电动滑块与滑轨契合连接,伸缩杆的上端与电动滑块固定连接,下端与固定杆的一端铰接,固定杆的另一端与安装盒固定连接,第一杆件穿过固定杆,两端各固定连接有固定板,安装杆设于电动滑块的两侧,一端与安装板固定连接,另一端与固定板固定连接,电动装置控制电动滑块在滑轨上来回滑动,电动滑轨的滑动使伸缩杆向固定杆的一端施加力,令固定杆能够发生角度上的改变,从而最终可以对安装盒的位置进行微调。
进一步地,所述的安装板的上表面还开设有圆环型的导槽,连接杆的上端与安装箱固定连接,下端为导块,导块契合嵌入导槽中,安装板的旋转会被导槽和导块的配合进行导向避免安装板与驱动电机发生脱离。
进一步地,所述的安装盒包括凹槽和多个空腔,凹槽开设于安装盒的下端,开口向下,空腔开设于安装盒的周边内部,空腔用于放置夹持结构。
进一步地,所述的夹持结构包括限位条和气动推杆,气动推杆置于安装盒的空腔内,杆件向外延伸至凹槽内,并与限位条垂直连接,气动推杆推动限位条向凹槽方向延伸,多个限位条同时对零件进行夹持。
进一步地,安装盒的上表面还安装有吸附结构,所述的吸附结构包括气泵、排气管、吸气管、抽气罩和保护壳,气泵置于安装盒的上表面上,排气管与气泵出口连接,吸气管的一端与气泵入口连接,另一端延伸至凹槽内,并连接有抽气罩,气泵外套有保护壳,吸附结构用于吸起无法夹持的物料或零件。
进一步地,所述的安装盒的左右两侧面均设有警示结构,所述的警示结构包括支架、压力传感器、旋转板、滚轮和第二杆件,压力传感器设于安装盒的侧面上,压力传感器的两侧靠下位置各设有支架,支架一端垂直固定于安装盒的侧面,第二杆件穿过旋转板,第二杆件的两端分别固定连接支架的另一端,旋转板的下端两侧设有滚轮,旋转板能绕第二杆件旋转,当安装盒的下表面触地时,旋转板的上端正好抵靠到压力传感器上给与警示。
进一步地,所述的滑轨与第一杆件空间垂直。
进一步地,所述的抽气罩的外部包裹有丝网。
本发明的有益效果在于:
1)本发明提供有导槽、导块、电动滑块、驱动电机和连接杆,利用驱动电机可以带动安装板旋转,安装板的旋转会被导槽和导块的配合进行导向避免安装板与驱动电机发生脱离,同时通过电动滑块的移动可以带动安装盒向固定杆的一端施加力,令固定杆能够发生角度上的改变,从而最终可以对安装盒的位置进行微调,保证安装盒能以合适的角度对物料进行夹持,通过此解决了本装置下爪角度单一的问题;
2)本发明提供有排气管、气泵、抽气罩和吸气管,利用气泵将空气从吸气管流向排气管产生负压,利用抽气罩将物料吸起,即可避免无法夹持或者物料破损的情况,通过此解决了本装置无法夹持较小物体的问题;
3)本发明提供有支架、滚轮、旋转板和压力传感器,利用平台向滚轮施加反作用力,使得滚轮带动旋转板旋转一定角度,这样旋转板的顶部会挤压压力传感器,压力传感器接受到信号进行反馈,提醒使用者停止下爪,避免其与平台发生碰撞以及摩擦,通过此解决了本装置容易与平台发生摩擦的问题。
附图说明
图1为本发明的立体结构示意图;
图2为本发明的剖视图;
图3为本发明的角度调节机构的侧视图;
图4为本发明的仰视图。
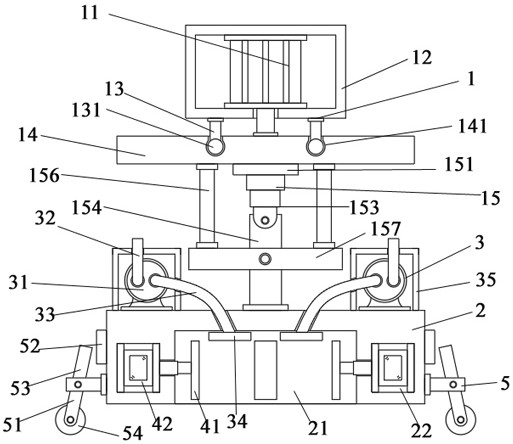
图中:1、旋转调节结构;11、驱动电机;12、安装箱;13、连接杆;14、安装板;15、角度调节机构;151、电动滑块;152、滑轨;153、伸缩杆;154、固定杆;155、第一杆件;156、安装杆;157、固定板;2、安装盒;21、凹槽;22、空腔;3、吸附结构;31、气泵;32、排气管;33、吸气管;34、抽气罩;35、保护壳;4、夹持结构;41、限位条;42、气动推杆;5、警示结构;51、支架;52、压力传感器;53、旋转板;54、滚轮;55、第二杆件。
具体实施方式
下面结合说明书附图对本发明作进一步地说明,但本发明的保护范围并不仅限于此,本发明中的“上”、“下”、“左”、“右”等方位名词,仅代表图中的位置,不代表绝对位置。
如图所示,一种机械手装置,包括旋转调节结构1、安装盒2、吸附结构3、夹持结构4和警示结构5,旋转调节结构1包括驱动电机11、安装箱12、连接杆13、安装板14和角度调节机构15,角度调节机构15包括电动滑块151、滑轨152、伸缩杆153、固定杆154、第一杆件155、安装杆156和固定板157,驱动电机11设于安装箱12内,驱动电机11的旋转杆与安装板14的上表面固定连接,安装板14 的下表面开设有滑轨152,电动滑块151上端契合卡扣入滑轨152中,下端与伸缩杆153的上端通过螺钉固定连接,伸缩杆153下端与固定杆154铰接,固定杆154的下端与安装盒2的上表面通过螺钉固定连接,第一杆件155穿过固定杆154,两端通过胶粘或焊接的方式各固定连接有一块固定板157,安装杆156设于电动滑块151的两侧,一端与安装板14通过螺钉固定连接,另一端与固定板157通过螺钉固定连接,滑轨152与第一杆件155空间垂直,安装板14的上表面还开设有圆环型的导槽141,连接杆13的上端与安装箱12通过螺钉固定连接,下端为导块131,导块131为圆球型,契合嵌入导槽141中。
安装盒2的下表面开设有凹槽21,凹槽21的四周边部各开有一个空腔22;夹持结构4包括气动推杆42和限位条41,气动推杆42置于空腔22内,杆件向外延伸至凹槽21内,并与限位条41通过螺钉垂直固定连接。
安装盒2的上表面的两侧各设有一个吸附结构3,所述的吸附结构3包括气泵31、排气管32、吸气管33、抽气罩34和保护壳35,气泵31底部通过螺钉固定于安装盒2的上表面上,排气管32与气泵31出口连接,吸气管33的一端与气泵31入口连接,另一端延伸至凹槽21内,并连接有抽气罩34,抽气罩34的外部包裹有丝网,气泵31外套有保护壳35,排气管32延伸至保护壳35外。
安装盒2的左右两侧安装面均设有警示结构5,所述的警示结构5包括支架51、压力传感器52、旋转板53、滚轮54和第二杆件55,压力传感器52通过螺钉固定于安装盒2的侧面上,压力传感器52的两侧靠下位置各设有支架51,支架51一端垂直固定于安装盒2的侧面,第二杆件55穿过旋转板53,第二杆件55的两端分别固定连接支架51的另一端,旋转板53的下端两侧设有滚轮54,旋转板53能绕第二杆件55旋转,当安装盒2的下表面触地时,旋转板53的上端正好抵靠到压力传感器52上给与警示。
工作原理:使用本装置时,首先将装置安装在对应的机器上,通过驱动电机11可以带动安装板14旋转,安装板14的旋转会被导槽141和导块131的配合进行导向避免安装板14与驱动电机11发生脱离,同时通过电动滑块151的移动可以带动安装盒2向固定杆154的一端施加力,令固定杆154能够发生角度上的改变,从而最终可以对安装盒2的位置进行微调,保证安装盒2能以合适的角度对物料进行夹持;当需要一些较小且不规则亦或者容易损坏的物体时,启动气泵31,气泵31令空气从吸气管33流向排气管32产生负压,利用抽气罩34将物料吸起,即可避免无法夹持或者物料破损的情况;当滚轮54接触平台后,平台会向滚轮54施加反作用力,使得滚轮54带动旋转板53旋转一定角度,这样旋转板53的顶部会挤压压力传感器52,压力传感器52接受到信号进行反馈,提醒使用者停止下爪,避免其与平台发生碰撞以及摩擦。
- 机械手臂控制装置,包含该控制装置的机械手臂系统及机械手臂控制方法
- 机械手、机械手控制装置以及机械手系统