一种仿生林木病虫害巡检爬树机器人
文献发布时间:2023-06-19 12:22:51
技术领域
本发明属于机器人技术领域,涉及到一种仿生林木病虫害检测的爬树机器人。
背景技术
在现代林业生态环境建设中,林木病虫害被称作是“不冒烟的森林火灾”。我国林木病虫害发生面积较大,每年发生面积达870万hm
发明内容
在下文中给出了关于本发明的简要概述,以便提供关于本发明的某些方面的基本理解。应当理解,这个概述并不是关于本发明的穷举性概述。它并不是意图确定本发明的关键或重要部分,也不是意图限定本发明的范围。其目的仅仅是以简化的形式给出某些概念,以此作为稍后论述的更详细描述的前序。
鉴于此,为了使病虫害巡检任务高效的完成,进而提出了一种仿生林木病虫害巡检爬树机器人。仿生林木病虫害巡检爬树机器人在工作时,电推杆带动左底板进行上、下、左、右移动,此时右底板保持初始位置;在前机械臂和中机械臂之间以及中机械臂和后机械臂之间都安装有电机,当左底板移动到确定的位置时,中机械臂沿机械臂转轴运动,根据树杆的粗细程度调整环抱的位置和角度并实施抱紧;前机械臂在中机械臂实现对树木的抱紧后,在电机的驱动下对树杆进行抱紧。在左底板完成移动和抱紧后,右底板以同样的方式完成移动和抱紧,完成仿生林木病虫害检测爬树机器人在树木上整体的移动。另外在后机械臂与底板之间安装有电机,当遇到攀爬障碍时,机械臂可沿着转轴旋转一定的角度,从而绕开树枝障碍。最后,移动到指定的位置时,装载有视觉识别系统的折叠式升降式云台升起对病虫害进行识别检测。
方案:一种仿生林木病虫害巡检爬树机器人包括左底板、右底板、左上机械臂、左下机械臂、右上机械臂、右下机械臂、上电推杆、下电推杆、电机、外壳体、升降式云台、控制室、备用电源,其中机械臂由三个关节组成,包含前机械臂、中机械臂以及后机械臂。林木病虫害巡检爬树机器人在工作时有五种状态:
第一种状态:上电推杆、下电推杆处于初始状态,左底板和右底板处于平齐位置,左机械臂、左机械臂、右机械臂、右机械臂对树杆处于抱紧状态;
第二种状态:左上机械臂、左下机械臂在电机的驱动下沿着机械臂转轴张开,右上机械臂、右下机械臂保持抱紧状态,上电推杆带动左底板进行上下左右移动,移动到确定位置后,中机械臂在电机的驱动下根据树杆的粗细调整环抱的位置和角度并进行抱紧。随后前机器臂在电机的驱动下再次对树杆进行抱紧;
第三种状态:右上机械臂、右下机械臂打开,下电推杆带动右底板进行上下左右移动,移动到确定位置后,中机械臂在电机的驱动下根据树杆的粗细调整环抱的位置和角度并进行抱紧;随后前机器臂在电机的驱动下再次对树杆进行抱紧,完成仿生林木病虫害巡检爬树机器人在树木上整体的移动;
第四种状态:当仿生林木病虫害巡检爬树机器人遇到明显地树枝障碍时,后机械臂与左底板、右底板上安装的电机分别带动左上机械臂、左下机械臂、右上机械臂、右下机械臂旋转一定的角度,从而绕开树枝障碍;
第五种状态:装载有视觉识别系统的折叠升降式云台升起对病虫害进行检测。
进一步地:所述左底板、右底板对称安装,上电推杆横向安装在左底板与右底板之间,下电推杆纵向安装在底板上,上电推杆、下电推杆通过支撑底座固定在左底板和右底板上。
进一步地:所述机械臂由前机械臂、中机械臂、后机械臂组成。
进一步地:所述机械臂为环抱式结构,后机械臂的安装包括后机械臂通过电机轴套、内六角螺栓与底板上的电机相连接;通过内六角螺栓与后机械臂外壳连接。中机械臂安装在后机械臂下方,通过六角螺栓与中机械臂外壳连接。前机械臂通过电机轴套、内六角螺栓与中机械臂上的电机相连;通过六角螺栓与前机械臂外壳连接。
进一步地:所述升降式云台为折叠式结构,通过螺栓与外壳体连接。工作时折叠结构打开,装载有视觉识别系统的云台上升到检测区域对病虫害进行识别检测。
本发明以电机为动力源,仿生林木病虫害巡检爬树机器人在工作时,电推杆带动左底板进行上下左右移动,此时右底板保持初始位置,在前机械臂和中机械臂之间以及中机械臂和后机械臂之间都安装有电机,当左底板移动到确定的位置时,中机械臂沿机械臂转轴运动,根据树杆的粗细程度调整环抱的位置和角度并实施抱紧,前机械臂在中机械臂实现对树木的抱紧后,在电机的驱动下对树杆进行抱紧。在左底板完成移动和抱紧后,右底板以同样的方式完成移动和抱紧,完成仿生林木病虫害检测爬树机器人在树木上整体的移动。另外在后机械臂与底板之间安装有电机,当遇到一定的攀爬障碍时,机械臂可沿着转轴旋转一定的角度,从而绕开明显的障碍。最后,移动到特定的位置时升降式云台升起对病虫害进行检测。该装置在有效的防止病虫害对林木资源损害的同时也解决传统人力巡检效率低、投入大的问题。本发明的上述技术特征及技术方案,在结构不产生冲突的情况下,可以任意组合。
本发明所达到的效果为:
1.本发明的一种仿生林木病虫害巡检爬树机器人,在工作状态下左上机械臂、左下机械臂在电机的驱动下沿着机械臂转轴张开,右上机械臂、右下机械臂保持初始抱紧状态;上电推杆带动左底板向上、下、左、右移动,完成仿生林木病虫害巡检爬树机器人左半部分的移动。随后,右上机械臂、右下机械臂张开,下电推杆带动右底板向上、下、左、右移动,完成仿生林木病虫害巡检爬树机器人右半部分的移动。由上述仿照树懒爬树动作实现林木病虫害巡检爬树机器人在树杆上的攀爬移动过程。由电推杆分别带动可分离的左右底板进行攀爬,使仿生林木病虫害巡检爬树机器人具有易分离性,相比整体环绕式爬树机器人增加了林木病虫害巡检爬树机器人对环境的适应性。
2.本发明的一种仿生林木病虫害巡检爬树机器人,中机械臂在电机的驱动下根据树杆的粗细调整环抱的位置和角度并进行抱紧;随后前机器臂在电机的驱动下再次对树杆进行二次抱紧,完成仿生林木病虫害巡检爬树机器人在树杆上整体的抱紧过程。采用四组前、中、后三个关节的3自由度机械臂对树杆进行抱紧,相比贴合式、单组机械臂式、环抱式等抱紧方式,使林木病虫害巡检爬树机器人更不易脱落;另外通过中机械臂对不同粗细树杆环抱角度和位置进行调整,能有效的解决传统爬树机器人通过树杆被动打开抱紧装置,导致爬树机器人稳定性下降的问题;再次,可以使仿生林木病虫害巡检爬树机器人对不同树木的适应性大大提高,有利于巡检任务的完成。
3.本发明的一种仿生林木病虫害巡检爬树机器人,当仿生林木病虫害巡检爬树机器人遇到明显地树枝障碍时,后机械臂与左底板、右底板上安装的电机分别带动左上机械臂、左下机械臂、右上机械臂、右下机械臂旋转一定的角度,从而绕开树枝障碍。机械臂通过机械转轴旋转绕枝,上下机械臂交替进行,更具有稳定性。另外,机械臂兼具抱紧和绕枝功能,从而不会增加林木病虫害巡检爬树机器人结构的复杂程度,使仿生林木病虫害巡检爬树机器人结构简单,具有更好的可实施性。
4.本发明的一种仿生林木病虫害巡检爬树机器人,所述升降式云台为折叠式结构,装载视觉识别系统,通过螺栓与外壳体连接。工作时,折叠结构打开,云台上升到检测区域对病虫害进行识别。采用折叠升降式云台作为检测装置,可以使仿生林木病虫害巡检爬树机器人更适应检测环境。另外云台作为检测平台可以使成像更清晰稳定,有利于视觉识别系统进一步地对病虫害进行检测分析,提高检测精度。
附图说明
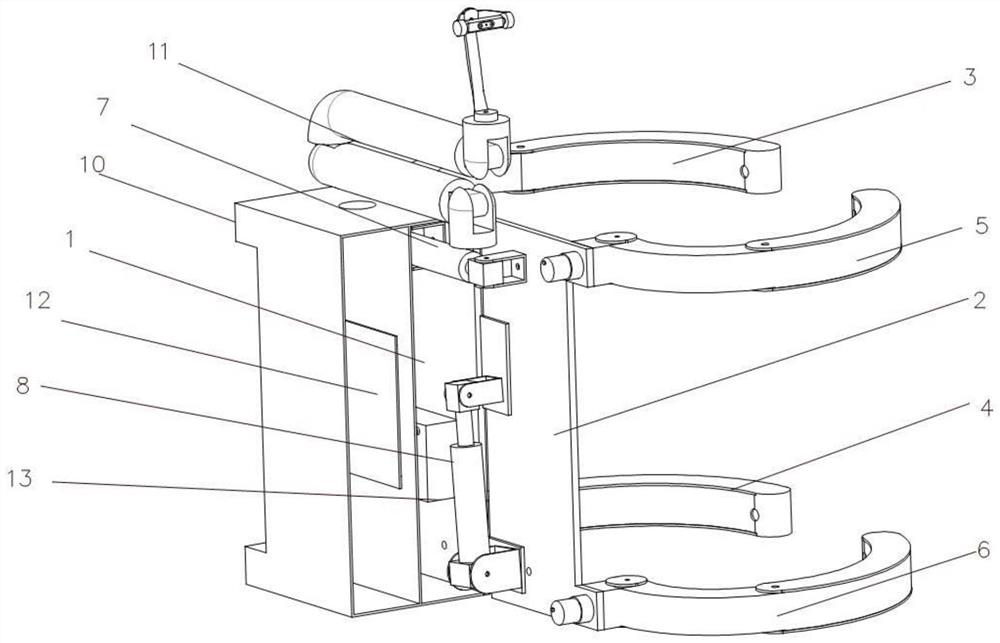
图1为本发明提出的一种仿生林木病虫害巡检爬树机器人的整体结构示意图;
图2为本发明提出的一种仿生林木病虫害巡检爬树机器人的机械臂视示意图;
图3为本发明提出的一种仿生林木病虫害巡检爬树机器人的底板示意图。
1-左底板;2-右底板;3-左上机械臂;4-左下机械臂;5-右上机械臂;6-右下机械臂;7-上电推杆;8-下电推杆;9-电机;10-外壳体;11-升降式云台;12-控制室;13-备用电源;14-支撑底座;15-16-17-18-前机械臂;19-20-21-22-中机械臂;23-24-25-26-后机械臂;27-电机轴套;28-内六角螺栓;29-后机械臂外壳;30-中机械臂外壳;31-前机械臂外壳。
具体实施方式
为了使本技术领域的人员更好地理解本申请方案,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分的实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本申请保护的范围。
需要说明的是,本申请的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本申请的实施例。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
在本申请中,术语“上”、“下”、“内”、“中”、“外”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系。这些术语主要是为了更好地描述本申请及其实施例,并非用于限定所指示的装置、单元或组成部分必须具有特定方位,或以特定方位进行构造和操作。
并且,上述部分术语除了可以用于表示方位或位置关系以外,还可能用于表示其他含义,例如术语“上”在某些情况下也可能用于表示某种依附关系或连接关系。对于本领域普通技术人员而言,可以根据具体情况理解这些术语在本申请中的具体含义。
此外,术语“设置”、“连接”、“固定”应做广义理解。例如,“连接”可以是固定连接,可拆卸连接,或整体式构造;可以是机械连接,或电连接;可以是直接相连,或者是通过中间媒介间接相连,又或者是两个装置、单元或组成部分之间内部的连通。对于本领域普通技术人员而言,可以根据具体情况理解上述术语在本申请中的具体含义。
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
本发明一种仿生林木病虫害巡检爬树机器人,结构包括:左底板、右底板、左上机械臂、左下机械臂、右上机械臂、右下机械臂、电推杆、电机、外壳体、升降式云台、控制室、备用电源,其中机械臂由三个关节组成,包含前机械臂、中机械臂以及后机械臂。左上机械臂(3)、左下机械臂(4)在电机的驱动下沿着机械臂转轴张开,右上机械臂(5)、右下机械臂(6)保持抱紧状态,上电推杆(7)带动左底板(1)进行上、下、左、右移动,移动到确定位置后,中机械臂(19)(20)在电机(9)的驱动下根据树杆的粗细调整环抱的位置和角度并进行抱紧,随后前机器臂(15)(16)在电机(9)的驱动下再次对树杆进行抱紧;右上机械臂(5)、右下机械臂(6)打开,下电推杆(8)带动右底板(2)进行上下左右移动;移动到确定位置后,中机械臂(21)(22)在电机(9)的驱动下根据树杆的粗细调整环抱的位置和角度并进行抱紧;随后前机器臂(17)(18)在电机的驱动下再次对树杆进行抱紧,完成仿生林木病虫害巡检爬树机器人在树木上整体的移动。当仿生林木病虫害巡检爬树机器人遇到树枝障碍时,后机械臂(20)(21)(22)(23)与左底板(1)、右底板(2)安装的电机(9)分别带动左上机械臂(3)、左下机械臂(4)、右上机械臂(5)、右下机械臂(6)旋转一定的角度,从而绕开树枝障碍;到达指定区域,装载有视觉识别系统的折叠式升降式云台(11)升起对病虫害进行检测。
所述左底板(1)、右底板(2)对称安装,上电推杆(7)横向安装在底板(1)与底板(2)之间,下电推杆(8)纵向安装在底板(2)上,上电推杆(7)、下电推杆(8)通过支撑底坐(25)固定在左底板(1)和右底板(2)上。
所述机械臂由前机械臂(15)(16)(17)(18)、中机械臂(19)(20)(21)(22)以及后机械臂(23)(24)(25)(26)组成。
所述机械臂为环抱式结构,后机械臂(23)(24)(25)(26)的安装包括后机械臂(23)(24)(25)(26)通过电机轴套(27)、内六角螺栓(28)与底板上的电机(9)相连接,通过内六角螺栓(28)与后机械臂外壳(29)连接;中机械臂(19)(20)(21)(22)安装在后机械臂(23)(24)(25)(26)下方,通过六角螺栓(28)与中机械臂外壳(30)连接;前机械臂(15)(16)(17)(18)通过电机轴套(27)、内六角螺栓(28)与中机械臂(19)(20)(21)(22)上的电机(9)相连;通过六角螺栓(28)与前机械臂外壳(31)连接。
所述装载视觉识别系统的升降式云台(11)为折叠式结构,通过螺栓(28)与外壳体(10)连接。工作时,折叠结构打开,云台上升到检测区域对病虫害进行识别。
虽然本发明所揭示的实施方式如上,但其内容只是为了便于理解本发明的技术方案而采用的实施方式,并非用于限定本发明。任何本发明所属技术领域内的技术人员,在不脱离本发明所揭示的核心技术方案的前提下,可以在实施的形式和细节上做任何修改与变化,但本发明所限定的保护范围,仍须以所附的权利要求书限定的范围为准。
- 一种仿生林木病虫害巡检爬树机器人
- 一种仿生柔性爬树机器人